

LCD触屏驱动
tiny4412多点触摸屏驱动程序(基于I2C协议):
#include <linux/kernel.h> #include <linux/module.h> #include <linux/interrupt.h> #include <linux/platform_device.h> #include <linux/i2c.h> #include <linux/err.h> #include <linux/irq.h> #include <linux/input.h> #include <linux/slab.h> #include <mach/gpio.h> #include <mach/irqs.h> #include <plat/gpio-cfg.h> #include <plat/ctouch.h> #define MTP_MAX_ID 15 //由硬件决定 #define MTP_IRQ gpio_to_irq(EXYNOS4_GPX1(6)) #define MTP_ADDR (0x70 >> 1) static struct input_dev *mtp_inputdev; static struct work_struct mtp_work; struct i2c_client *mtp_client; static int mtp_points; struct mtp_event { int x; int y; int id; }; static struct mtp_event mtp_events[16]; static irqreturn_t mtp_handler(int irq, void *dev_id) { /* 本该获取触点数据,并上报,但I2C是慢速设备,不该放在中断服务程序 * 中断服务程序执行中断的上半部分,将下半部分放入工作队列,让内核线程 * 来处理 */ schedule_work(&mtp_work); return IRQ_HANDLED; } static int mtp_ft5x0x_i2c_rxdata(struct i2c_client *client, char *rxdata, int length) { int ret; struct i2c_msg msgs[] = { { .addr = client->addr, .flags = 0, .len = 1, .buf = rxdata, }, { .addr = client->addr, .flags = I2C_M_RD, .len = length, .buf = rxdata, }, }; ret = i2c_transfer(client->adapter, msgs, 2); if (ret < 0) pr_err("%s: i2c read error: %d\n", __func__, ret); return ret; } static int mtp_ft5x0x_read_data(void) { u8 buf[32] = { 0 }; int ret; ret = mtp_ft5x0x_i2c_rxdata(mtp_client, buf, 31); if (ret < 0) { printk("%s: read touch data failed, %d\n", __func__, ret); return ret; } mtp_points = buf[2] & 0x0f; switch (mtp_points) { case 5: mtp_events[4].x = (s16)(buf[0x1b] & 0x0F)<<8 | (s16)buf[0x1c]; mtp_events[4].y = (s16)(buf[0x1d] & 0x0F)<<8 | (s16)buf[0x1e]; mtp_events[4].id = buf[0x1d] >> 4; case 4: mtp_events[3].x = (s16)(buf[0x15] & 0x0F)<<8 | (s16)buf[0x16]; mtp_events[3].y = (s16)(buf[0x17] & 0x0F)<<8 | (s16)buf[0x18]; mtp_events[3].id = buf[0x17] >> 4; case 3: mtp_events[2].x = (s16)(buf[0x0f] & 0x0F)<<8 | (s16)buf[0x10]; mtp_events[2].y = (s16)(buf[0x11] & 0x0F)<<8 | (s16)buf[0x12]; mtp_events[2].id = buf[0x11] >> 4; case 2: mtp_events[1].x = (s16)(buf[0x09] & 0x0F)<<8 | (s16)buf[0x0a]; mtp_events[1].y = (s16)(buf[0x0b] & 0x0F)<<8 | (s16)buf[0x0c]; mtp_events[1].id = buf[0x0b] >> 4; case 1: mtp_events[0].x = (s16)(buf[0x03] & 0x0F)<<8 | (s16)buf[0x04]; mtp_events[0].y = (s16)(buf[0x05] & 0x0F)<<8 | (s16)buf[0x06]; mtp_events[0].id = buf[0x05] >> 4; break; default: //printk("%s: invalid touch data, %d\n", __func__, event->touch_point); return 0; } return 0; } static void mtp_work_func(struct work_struct *work) { int i; int ret = mtp_ft5x0x_read_data(); if (ret< 0) return ; if (!mtp_points) { input_mt_sync(mtp_inputdev); input_sync(mtp_inputdev); } for (i = 0; i < mtp_points; i++) { input_event(mtp_inputdev, EV_ABS, ABS_MT_POSITION_X, mtp_events[i].x); input_event(mtp_inputdev, EV_ABS, ABS_MT_POSITION_Y, mtp_events[i].y); input_event(mtp_inputdev, EV_ABS, ABS_MT_TRACKING_ID, mtp_events[i].id); input_mt_sync(mtp_inputdev); } input_sync(mtp_inputdev); } static int __devinit mtp_input_probe(struct i2c_client *client, const struct i2c_device_id *id) { printk("mtp_input_probe \n"); mtp_inputdev = input_allocate_device(); if (!mtp_inputdev ) { printk("input_allocate_device error\n"); return -1; } mtp_client = client; set_bit(EV_ABS, mtp_inputdev->evbit); set_bit(EV_SYN, mtp_inputdev->evbit); set_bit(INPUT_PROP_DIRECT, mtp_inputdev->propbit); //加上这句就不需要配置文件了 set_bit(ABS_MT_TRACKING_ID, mtp_inputdev->absbit); set_bit(ABS_MT_POSITION_X, mtp_inputdev->absbit); set_bit(ABS_MT_POSITION_Y, mtp_inputdev->absbit); input_set_abs_params(mtp_inputdev, ABS_MT_TRACKING_ID, 0, MTP_MAX_ID, 0, 0); input_set_abs_params(mtp_inputdev, ABS_MT_POSITION_X, 0, 800, 0, 0); input_set_abs_params(mtp_inputdev, ABS_MT_POSITION_Y, 0, 480, 0, 0); mtp_inputdev->name = "mtp_input_ts"; //名字不能忽略,安卓系统要根据它找到配置文件 input_register_device(mtp_inputdev); INIT_WORK(&mtp_work, mtp_work_func); request_irq(MTP_IRQ, mtp_handler, IRQ_TYPE_EDGE_BOTH, "MTP_input", mtp_inputdev); return 0; } static int __devexit mtp_input_remove(struct i2c_client *client) { printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__); free_irq(MTP_IRQ, mtp_inputdev); cancel_work_sync(&mtp_work); input_unregister_device(mtp_inputdev); input_free_device(mtp_inputdev); return 0; } static const struct i2c_device_id mtp_input_id_table[] = { { "mtp_input", 0 }, {} }; static int mtp_input_detect(struct i2c_client *client, struct i2c_board_info *info) { /* 能运行到这里, 表示该addr的设备是存在的 * 但是有些设备单凭地址无法分辨(A芯片的地址是0x50, B芯片的地址也是0x50) * 还需要进一步读写I2C设备来分辨是哪款芯片 * detect就是用来进一步分辨这个芯片是哪一款,并且设置info->type */ u8 buf[32] = { 0 }; int ret; printk("mtp_input_detect : addr = 0x%x\n", client->addr); /* 进一步判断是哪一款 */ buf[0] = 0xa3; ret = mtp_ft5x0x_i2c_rxdata(client, buf, 1); if (ret < 0) { printk("there is no real device, read err\n"); return ret; } if (buf[0] != 0x55) { printk("there is no real device, val err\n"); return ret; } //printk("chip vendor id = 0x%x \n", buf[0]); strlcpy(info->type, "mtp_input", I2C_NAME_SIZE); //在id_table中要有这个名字才能匹配,来调用probe函数 return 0; } static const unsigned short addr_list[] = { MTP_ADDR, I2C_CLIENT_END }; /* 1. 分配/设置i2c_driver */ static struct i2c_driver mtp_input_driver = { .class = I2C_CLASS_HWMON, /* 表示去哪些适配器上找设备 */ .driver = { .name = "mtp_input", .owner = THIS_MODULE, }, .probe = mtp_input_probe, .remove = __devexit_p(mtp_input_remove), .id_table = mtp_input_id_table, .detect = mtp_input_detect, /* 用这个函数来检测设备确实存在 */ .address_list = addr_list, /* 这些设备的地址 */ }; static int mtp_input_drv_init(void) { /* 2. 注册i2c_driver */ i2c_add_driver(&mtp_input_driver); return 0; } static void mtp_input_drv_exit(void) { i2c_del_driver(&mtp_input_driver); } module_init(mtp_input_drv_init); module_exit(mtp_input_drv_exit); MODULE_LICENSE("GPL");
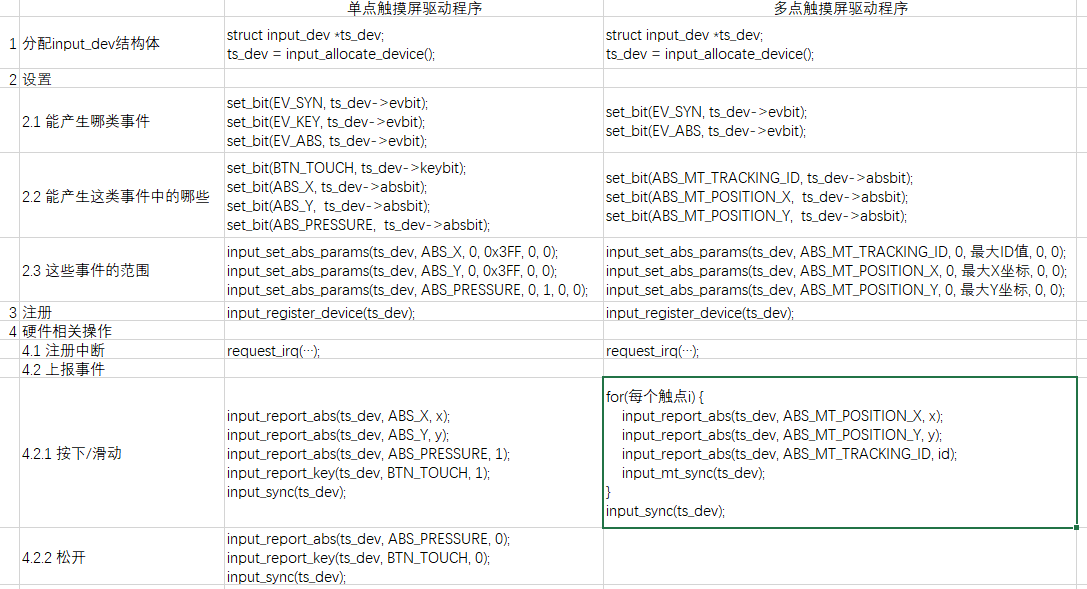
单点触摸屏和多点触摸屏对比:
单点触摸屏驱动程序(基于ADC获得输入):
#include <linux/errno.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/input.h>
#include <linux/init.h>
#include <linux/serio.h>
#include <linux/delay.h>
#include <linux/platform_device.h>
#include <linux/clk.h>
#include <asm/io.h>
#include <asm/irq.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/input.h>
#include <linux/init.h>
#include <linux/serio.h>
#include <linux/delay.h>
#include <linux/platform_device.h>
#include <linux/clk.h>
#include <asm/io.h>
#include <asm/irq.h>
//#include <asm/plat-s3c24xx/ts.h>
//#include <asm/arch/regs-adc.h>
//#include <asm/arch/regs-gpio.h>
//#include <asm/arch/regs-gpio.h>
struct s3c_ts_regs {
unsigned long adccon;
unsigned long adctsc;
unsigned long adcdly;
unsigned long adcdat0;
unsigned long adcdat1;
unsigned long adcupdn;
};
unsigned long adccon;
unsigned long adctsc;
unsigned long adcdly;
unsigned long adcdat0;
unsigned long adcdat1;
unsigned long adcupdn;
};
static struct input_dev *s3c_ts_dev;
static volatile struct s3c_ts_regs *s3c_ts_regs;
static volatile struct s3c_ts_regs *s3c_ts_regs;
static struct timer_list ts_timer;
static void enter_wait_pen_down_mode(void)
{
s3c_ts_regs->adctsc = 0xd3;
}
{
s3c_ts_regs->adctsc = 0xd3;
}
static void enter_wait_pen_up_mode(void)
{
s3c_ts_regs->adctsc = 0x1d3;
}
{
s3c_ts_regs->adctsc = 0x1d3;
}
static void enter_measure_xy_mode(void)
{
s3c_ts_regs->adctsc = (1<<3)|(1<<2);
}
{
s3c_ts_regs->adctsc = (1<<3)|(1<<2);
}
static void start_adc(void)
{
s3c_ts_regs->adccon |= (1<<0);
}
{
s3c_ts_regs->adccon |= (1<<0);
}
static int s3c_filter_ts(int x[], int y[])
{
#define ERR_LIMIT 10
{
#define ERR_LIMIT 10
int avr_x, avr_y;
int det_x, det_y;
int det_x, det_y;
avr_x = (x[0] + x[1])/2;
avr_y = (y[0] + y[1])/2;
avr_y = (y[0] + y[1])/2;
det_x = (x[2] > avr_x) ? (x[2] - avr_x) : (avr_x - x[2]);
det_y = (y[2] > avr_y) ? (y[2] - avr_y) : (avr_y - y[2]);
det_y = (y[2] > avr_y) ? (y[2] - avr_y) : (avr_y - y[2]);
if ((det_x > ERR_LIMIT) || (det_y > ERR_LIMIT))
return 0;
return 0;
avr_x = (x[1] + x[2])/2;
avr_y = (y[1] + y[2])/2;
avr_y = (y[1] + y[2])/2;
det_x = (x[3] > avr_x) ? (x[3] - avr_x) : (avr_x - x[3]);
det_y = (y[3] > avr_y) ? (y[3] - avr_y) : (avr_y - y[3]);
det_y = (y[3] > avr_y) ? (y[3] - avr_y) : (avr_y - y[3]);
if ((det_x > ERR_LIMIT) || (det_y > ERR_LIMIT))
return 0;
return 1;
}
return 0;
return 1;
}
static void s3c_ts_timer_function(unsigned long data)
{
if (s3c_ts_regs->adcdat0 & (1<<15))
{
/* 已经松开 */
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
enter_wait_pen_down_mode();
}
else
{
/* 测量X/Y坐标 */
enter_measure_xy_mode();
start_adc();
}
}
{
if (s3c_ts_regs->adcdat0 & (1<<15))
{
/* 已经松开 */
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
enter_wait_pen_down_mode();
}
else
{
/* 测量X/Y坐标 */
enter_measure_xy_mode();
start_adc();
}
}
static irqreturn_t pen_down_up_irq(int irq, void *dev_id)
{
if (s3c_ts_regs->adcdat0 & (1<<15))
{
//printk("pen up\n");
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
enter_wait_pen_down_mode();
}
else
{
//printk("pen down\n");
//enter_wait_pen_up_mode();
enter_measure_xy_mode();
start_adc();
}
return IRQ_HANDLED;
}
static irqreturn_t adc_irq(int irq, void *dev_id)
{
static int cnt = 0;
static int x[4], y[4];
int adcdat0, adcdat1;
/* 优化措施2: 如果ADC完成时, 发现触摸笔已经松开, 则丢弃此次结果 */
adcdat0 = s3c_ts_regs->adcdat0;
adcdat1 = s3c_ts_regs->adcdat1;
{
static int cnt = 0;
static int x[4], y[4];
int adcdat0, adcdat1;
/* 优化措施2: 如果ADC完成时, 发现触摸笔已经松开, 则丢弃此次结果 */
adcdat0 = s3c_ts_regs->adcdat0;
adcdat1 = s3c_ts_regs->adcdat1;
if (s3c_ts_regs->adcdat0 & (1<<15))
{
/* 已经松开 */
cnt = 0;
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
enter_wait_pen_down_mode();
}
else
{
// printk("adc_irq cnt = %d, x = %d, y = %d\n", ++cnt, adcdat0 & 0x3ff, adcdat1 & 0x3ff);
/* 优化措施3: 多次测量求平均值 */
x[cnt] = adcdat0 & 0x3ff;
y[cnt] = adcdat1 & 0x3ff;
++cnt;
if (cnt == 4)
{
/* 优化措施4: 软件过滤 */
if (s3c_filter_ts(x, y))
{
//printk("x = %d, y = %d\n", (x[0]+x[1]+x[2]+x[3])/4, (y[0]+y[1]+y[2]+y[3])/4);
input_report_abs(s3c_ts_dev, ABS_X, (x[0]+x[1]+x[2]+x[3])/4);
input_report_abs(s3c_ts_dev, ABS_Y, (y[0]+y[1]+y[2]+y[3])/4);
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 1);
input_report_key(s3c_ts_dev, BTN_TOUCH, 1);
input_sync(s3c_ts_dev);
}
cnt = 0;
enter_wait_pen_up_mode();
{
/* 已经松开 */
cnt = 0;
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
enter_wait_pen_down_mode();
}
else
{
// printk("adc_irq cnt = %d, x = %d, y = %d\n", ++cnt, adcdat0 & 0x3ff, adcdat1 & 0x3ff);
/* 优化措施3: 多次测量求平均值 */
x[cnt] = adcdat0 & 0x3ff;
y[cnt] = adcdat1 & 0x3ff;
++cnt;
if (cnt == 4)
{
/* 优化措施4: 软件过滤 */
if (s3c_filter_ts(x, y))
{
//printk("x = %d, y = %d\n", (x[0]+x[1]+x[2]+x[3])/4, (y[0]+y[1]+y[2]+y[3])/4);
input_report_abs(s3c_ts_dev, ABS_X, (x[0]+x[1]+x[2]+x[3])/4);
input_report_abs(s3c_ts_dev, ABS_Y, (y[0]+y[1]+y[2]+y[3])/4);
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 1);
input_report_key(s3c_ts_dev, BTN_TOUCH, 1);
input_sync(s3c_ts_dev);
}
cnt = 0;
enter_wait_pen_up_mode();
/* 启动定时器处理长按/滑动的情况 */
mod_timer(&ts_timer, jiffies + HZ/100);
}
else
{
enter_measure_xy_mode();
start_adc();
}
}
return IRQ_HANDLED;
}
mod_timer(&ts_timer, jiffies + HZ/100);
}
else
{
enter_measure_xy_mode();
start_adc();
}
}
return IRQ_HANDLED;
}
static int s3c_ts_init(void)
{
struct clk* clk;
/* 1. 分配一个input_dev结构体 */
s3c_ts_dev = input_allocate_device();
{
struct clk* clk;
/* 1. 分配一个input_dev结构体 */
s3c_ts_dev = input_allocate_device();
/* 2. 设置 */
/* 2.1 能产生哪类事件 */
set_bit(EV_KEY, s3c_ts_dev->evbit);
set_bit(EV_ABS, s3c_ts_dev->evbit);
/* 2.1 能产生哪类事件 */
set_bit(EV_KEY, s3c_ts_dev->evbit);
set_bit(EV_ABS, s3c_ts_dev->evbit);
/* 2.2 能产生这类事件里的哪些事件 */
set_bit(BTN_TOUCH, s3c_ts_dev->keybit);
set_bit(BTN_TOUCH, s3c_ts_dev->keybit);
input_set_abs_params(s3c_ts_dev, ABS_X, 0, 0x3FF, 0, 0);
input_set_abs_params(s3c_ts_dev, ABS_Y, 0, 0x3FF, 0, 0);
input_set_abs_params(s3c_ts_dev, ABS_PRESSURE, 0, 1, 0, 0);
input_set_abs_params(s3c_ts_dev, ABS_Y, 0, 0x3FF, 0, 0);
input_set_abs_params(s3c_ts_dev, ABS_PRESSURE, 0, 1, 0, 0);
/* 3. 注册 */
input_register_device(s3c_ts_dev);
/* 4. 硬件相关的操作 */
/* 4.1 使能时钟(CLKCON[15]) */
clk = clk_get(NULL, "adc");
clk_enable(clk);
/* 4.2 设置S3C2440的ADC/TS寄存器 */
s3c_ts_regs = ioremap(0x58000000, sizeof(struct s3c_ts_regs));
/* 4.1 使能时钟(CLKCON[15]) */
clk = clk_get(NULL, "adc");
clk_enable(clk);
/* 4.2 设置S3C2440的ADC/TS寄存器 */
s3c_ts_regs = ioremap(0x58000000, sizeof(struct s3c_ts_regs));
/* bit[14] : 1-A/D converter prescaler enable
* bit[13:6]: A/D converter prescaler value,
* 49, ADCCLK=PCLK/(49+1)=50MHz/(49+1)=1MHz
* bit[0]: A/D conversion starts by enable. 先设为0
*/
s3c_ts_regs->adccon = (1<<14)|(49<<6);
* bit[13:6]: A/D converter prescaler value,
* 49, ADCCLK=PCLK/(49+1)=50MHz/(49+1)=1MHz
* bit[0]: A/D conversion starts by enable. 先设为0
*/
s3c_ts_regs->adccon = (1<<14)|(49<<6);
request_irq(IRQ_TC, pen_down_up_irq, IRQF_SAMPLE_RANDOM, "ts_pen", NULL);
request_irq(IRQ_ADC, adc_irq, IRQF_SAMPLE_RANDOM, "adc", NULL);
request_irq(IRQ_ADC, adc_irq, IRQF_SAMPLE_RANDOM, "adc", NULL);
/* 优化措施1:
* 设置ADCDLY为最大值, 这使得电压稳定后再发出IRQ_TC中断
*/
s3c_ts_regs->adcdly = 0xffff;
* 设置ADCDLY为最大值, 这使得电压稳定后再发出IRQ_TC中断
*/
s3c_ts_regs->adcdly = 0xffff;
/* 优化措施5: 使用定时器处理长按,滑动的情况
*
*/
init_timer(&ts_timer);
ts_timer.function = s3c_ts_timer_function;
add_timer(&ts_timer);
*
*/
init_timer(&ts_timer);
ts_timer.function = s3c_ts_timer_function;
add_timer(&ts_timer);
enter_wait_pen_down_mode();
return 0;
}
return 0;
}
static void s3c_ts_exit(void)
{
free_irq(IRQ_TC, NULL);
free_irq(IRQ_ADC, NULL);
iounmap(s3c_ts_regs);
input_unregister_device(s3c_ts_dev);
input_free_device(s3c_ts_dev);
del_timer(&ts_timer);
}
{
free_irq(IRQ_TC, NULL);
free_irq(IRQ_ADC, NULL);
iounmap(s3c_ts_regs);
input_unregister_device(s3c_ts_dev);
input_free_device(s3c_ts_dev);
del_timer(&ts_timer);
}
module_init(s3c_ts_init);
module_exit(s3c_ts_exit);
module_exit(s3c_ts_exit);
MODULE_LICENSE("GPL");

 浙公网安备 33010602011771号
浙公网安备 33010602011771号