python 进程入门
进程
进程调度原则


1.先来先服务(FCFS)调度算法是一种最简单的调度算法,该算法既可用于作业调度,也可用于进程调度。FCFS算法比较有利于长作业(进程),而不利于短作业(进程)。由此可知,本算法适合于CPU繁忙型作业,而不利于I/O繁忙型的作业(进程)。 2.短作业(进程)优先调度算法(SJ/PF)是指对短作业或短进程优先调度的算法,该算法既可用于作业调度,也可用于进程调度。但其对长作业不利;不能保证紧迫性作业(进程)被及时处理;作业的长短只是被估算出来的。 3.时间片轮转(Round Robin,RR)法的基本思路是让每个进程在就绪队列中的等待时间与享受服务的时间成比例。在时间片轮转法中,需要将CPU的处理时间分成固定大小的时间片,例如,几十毫秒至几百毫秒。如果一个进程在被调度选中之后用完了系统规定的时间片,但又未完成要求的任务,则它自行释放自己所占有的CPU而排到就绪队列的末尾,等待下一次调度。同时,进程调度程序又去调度当前就绪队列中的第一个进程。 显然,轮转法只能用来调度分配一些可以抢占的资源。这些可以抢占的资源可以随时被剥夺,而且可以将它们再分配给别的进程。CPU是可抢占资源的一种。但打印机等资源是不可抢占的。由于作业调度是对除了CPU之外的所有系统硬件资源的分配,其中包含有不可抢占资源,所以作业调度不使用轮转法。 在轮转法中,时间片长度的选取非常重要。首先,时间片长度的选择会直接影响到系统的开销和响应时间。如果时间片长度过短,则调度程序抢占处理机的次数增多。这将使进程上下文切换次数也大大增加,从而加重系统开销。反过来,如果时间片长度选择过长,例如,一个时间片能保证就绪队列中所需执行时间最长的进程能执行完毕,则轮转法变成了先来先服务法。时间片长度的选择是根据系统对响应时间的要求和就绪队列中所允许最大的进程数来确定的。 在轮转法中,加入到就绪队列的进程有3种情况: 一种是分给它的时间片用完,但进程还未完成,回到就绪队列的末尾等待下次调度去继续执行。 另一种情况是分给该进程的时间片并未用完,只是因为请求I/O或由于进程的互斥与同步关系而被阻塞。当阻塞解除之后再回到就绪队列。 第三种情况就是新创建进程进入就绪队列。 如果对这些进程区别对待,给予不同的优先级和时间片从直观上看,可以进一步改善系统服务质量和效率。例如,我们可把就绪队列按照进程到达就绪队列的类型和进程被阻塞时的阻塞原因分成不同的就绪队列,每个队列按FCFS原则排列,各队列之间的进程享有不同的优先级,但同一队列内优先级相同。这样,当一个进程在执行完它的时间片之后,或从睡眠中被唤醒以及被创建之后,将进入不同的就绪队列。 4.前面介绍的各种用作进程调度的算法都有一定的局限性。如短进程优先的调度算法,仅照顾了短进程而忽略了长进程,而且如果并未指明进程的长度,则短进程优先和基于进程长度的抢占式调度算法都将无法使用。 而多级反馈队列调度算法则不必事先知道各种进程所需的执行时间,而且还可以满足各种类型进程的需要,因而它是目前被公认的一种较好的进程调度算法。在采用多级反馈队列调度算法的系统中,调度算法的实施过程如下所述。 (1) 应设置多个就绪队列,并为各个队列赋予不同的优先级。第一个队列的优先级最高,第二个队列次之,其余各队列的优先权逐个降低。该算法赋予各个队列中进程执行时间片的大小也各不相同,在优先权愈高的队列中,为每个进程所规定的执行时间片就愈小。例如,第二个队列的时间片要比第一个队列的时间片长一倍,……,第i+1个队列的时间片要比第i个队列的时间片长一倍。 (2) 当一个新进程进入内存后,首先将它放入第一队列的末尾,按FCFS原则排队等待调度。当轮到该进程执行时,如它能在该时间片内完成,便可准备撤离系统;如果它在一个时间片结束时尚未完成,调度程序便将该进程转入第二队列的末尾,再同样地按FCFS原则等待调度执行;如果它在第二队列中运行一个时间片后仍未完成,再依次将它放入第三队列,……,如此下去,当一个长作业(进程)从第一队列依次降到第n队列后,在第n 队列便采取按时间片轮转的方式运行。 (3) 仅当第一队列空闲时,调度程序才调度第二队列中的进程运行;仅当第1~(i-1)队列均空时,才会调度第i队列中的进程运行。如果处理机正在第i队列中为某进程服务时,又有新进程进入优先权较高的队列(第1~(i-1)中的任何一个队列),则此时新进程将抢占正在运行进程的处理机,即由调度程序把正在运行的进程放回到第i队列的末尾,把处理机分配给新到的高优先权进程。
进程的并行与并发
并行 : 并行是指两者同时执行,比如赛跑,两个人都在不停的往前跑;(资源够用,比如三个线程,四核的CPU )
并发 : 并发是指资源有限的情况下,两者交替轮流使用资源,比如一段路(单核CPU资源)同时只能过一个人,A走一段后,让给B,B用完继续给A ,交替使用,目的是提高效率。
区别:
并行是从微观上,也就是在一个精确的时间片刻,有不同的程序在执行,这就要求必须有多个处理器。
并发是从宏观上,在一个时间段上可以看出是同时执行的,比如一个服务器同时处理多个session。
进程的三状态介绍
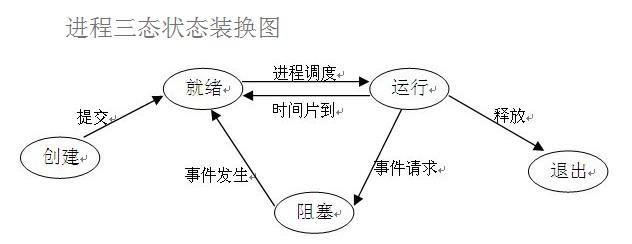
(1)就绪(Ready)状态
当进程已分配到除CPU以外的所有必要的资源,只要获得处理机便可立即执行,这时的进程状态称为就绪状态。
(2)执行/运行(Running)状态当进程已获得处理机,其程序正在处理机上执行,此时的进程状态称为执行状态。
(3)阻塞(Blocked)状态正在执行的进程,由于等待某个事件发生而无法执行时,便放弃处理机而处于阻塞状态。引起进程阻塞的事件可有多种,例如,等待I/O完成、申请缓冲区不能满足、等待信件(信号)等。
同步 / 异步 /
所谓同步就是一个任务的完成需要依赖另外一个任务时,只有等待被依赖的任务完成后,依赖的任务才能算完成,这是一种可靠的任务序列。要么成功都成功,失败都失败,两个任务的状态可以保持一致。
所谓异步是不需要等待被依赖的任务完成,只是通知被依赖的任务要完成什么工作,依赖的任务也立即执行,只要自己完成了整个任务就算完成了。至于被依赖的任务最终是否真正完成,依赖它的任务无法确定,所以它是不可靠的任务序列。
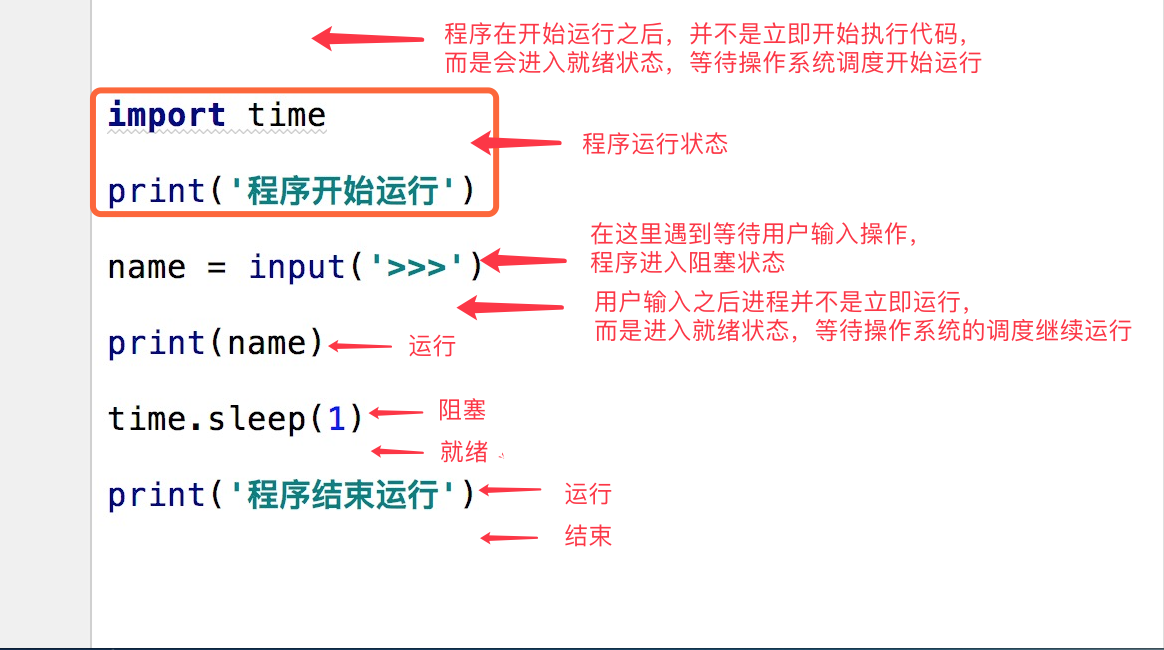
阻塞 / 非阻塞
阻塞和非阻塞这两个概念与程序(线程)等待消息通知(无所谓同步或者异步)时的状态有关。也就是说阻塞与非阻塞主要是程序(线程)等待消息通知时的状态角度来说的.如time.sleep(10),或input('>>>'),会导致程序无法继续执行后面的代码,这种状态就属于阻塞.
multiprocess模块
process模块介绍
Process([group [, target [, name [, args [, kwargs]]]]]),由该类实例化得到的对象,表示一个子进程中的任务(尚未启动) 强调: 1. 需要使用关键字的方式来指定参数 2. args指定的为传给target函数的位置参数,是一个元组形式,必须有逗号 参数介绍: 1 group参数未使用,值始终为None 2 target表示调用对象,即子进程要执行的任务 3 args表示调用对象的位置参数元组,args=(1,2,'egon',) 4 kwargs表示调用对象的字典,kwargs={'name':'egon','age':18} 5 name为子进程的名称
方法介绍
1 p.start():启动进程,并调用该子进程中的p.run() 2 p.run():进程启动时运行的方法,正是它去调用target指定的函数,我们自定义类的类中一定要实现该方法 3 p.terminate():强制终止进程p,不会进行任何清理操作,如果p创建了子进程,该子进程就成了僵尸进程,使用该方法需要特别小心这种情况。如果p还保存了一个锁那么也将不会被释放,进而导致死锁 4 p.is_alive():如果p仍然运行,返回True 5 p.join([timeout]):主线程等待p终止(强调:是主线程处于等的状态,而p是处于运行的状态)。timeout是可选的超时时间,需要强调的是,p.join只能join住start开启的进程,而不能join住run开启的进程
属性介绍
1 p.daemon:默认值为False,如果设为True,代表p为后台运行的守护进程,当p的父进程终止时,p也随之终止,并且设定为True后,p不能创建自己的新进程,必须在p.start()之前设置 2 p.name:进程的名称 3 p.pid:进程的pid 4 p.exitcode:进程在运行时为None、如果为–N,表示被信号N结束(了解即可) 5 p.authkey:进程的身份验证键,默认是由os.urandom()随机生成的32字符的字符串。这个键的用途是为涉及网络连接的底层进程间通信提供安全性,这类连接只有在具有相同的身份验证键时才能成功(了解即可)
注意
在Windows操作系统中由于没有fork(linux操作系统中创建进程的机制),在创建子进程的时候会自动 import 启动它的这个文件,而在 import 的时候又执行了整个文件。因此如果将process()直接写在文件中就会无限递归创建子进程报错。所以必须把创建子进程的部分使用if __name__ ==‘__main__’ 判断保护起来,import 的时候 ,就不会递归运行了。
创建进程
#方法1 import time from multiprocessing import Process def f(name): print('hello', name) print('我是子进程') if __name__ == '__main__': p = Process(target=f, args=('bob',)) p.start() time.sleep(1) print('执行主进程的内容了') #方法2 import os from multiprocessing import Process class MyProcess(Process): def __init__(self,name): super().__init__() self.name=name def run(self): print(os.getpid()) #获取进程id print('%s 正在开车' %self.name) if __name__ == '__main__': p1=MyProcess('laosiji') p1.start() #start会自动调用run
join方法,把异步的进程改为同步
import time from multiprocessing import Process def f(name): print('hello', name) time.sleep(1) if __name__ == '__main__': p_lst = [] for i in range(5): p = Process(target=f, args=('吊炸天',)) p.start() p_lst.append(p) p.join() # [p.join() for p in p_lst] print('父进程在执行')
守护进程
会随着主进程的结束而结束。
主进程创建守护进程
其一:守护进程会在主进程代码执行结束后就终止
其二:守护进程内无法再开启子进程,否则抛出异常:AssertionError: daemonic processes are not allowed to have children
from multiprocessing import Process import time def foo(): print(123) time.sleep(1) print("end123") def bar(): print(456) time.sleep(3) print("end456") if __name__ == '__main__': p1=Process(target=foo) p2=Process(target=bar) p1.daemon=True #一定要在p.start()前设置,设置p为守护进程,禁止p创建子进程,并且父进程代码执行结束,p即终止运行 p1.start() p2.start() time.sleep(0.1) print("main-------")
进程锁
模拟12306购票代码
#文件db的内容为:{"count":1} #注意一定要用双引号,不然json无法识别 #并发运行,效率高,但竞争写同一文件,数据写入错乱 from multiprocessing import Process,Lock import time,json,random def search(): dic=json.load(open('db')) print('\033[43m剩余票数%s\033[0m' %dic['count']) def get(): dic=json.load(open('db')) time.sleep(0.1) #模拟读数据的网络延迟 if dic['count'] >0: dic['count']-=1 time.sleep(0.2) #模拟写数据的网络延迟 json.dump(dic,open('db','w')) print('\033[43m购票成功\033[0m') def task(): search() get() if __name__ == '__main__': for i in range(100): #模拟并发100个客户端抢票 p=Process(target=task) p.start()
上述代码执行的过程中,会出现多个进程并行修改数据出现数据冲突的情况,设置进程锁,则避免了此问题.
添加进程锁后的代码加锁可以保证多个进程修改同一块数据时,同一时间只能有一个任务可以进行修改,即串行的修改,没错,速度是慢了,但牺牲了速度却保证了数据安全。 虽然可以用文件共享数据实现进程间通信,但问题是: 1.效率低(共享数据基于文件,而文件是硬盘上的数据) 2.需要自己加锁处理 #因此我们最好找寻一种解决方案能够兼顾:1、效率高(多个进程共享一块内存的数据)2、帮我们处理好锁问题。这就是mutiprocessing模块为我们提供的基于消息的IPC通信机制:队列和管道。 队列和管道都是将数据存放于内存中 队列又是基于(管道+锁)实现的,可以让我们从复杂的锁问题中解脱出来, 我们应该尽量避免使用共享数据,尽可能使用消息传递和队列,避免处理复杂的同步和锁问题,而且在进程数目增多时,往往可以获得更好的可获展性。
进程间通信——队列
创建共享的进程队列,Queue是多进程安全的队列,可以使用Queue实现多进程之间的数据传递。
方法介绍进程池和multiprocess.Pool模块
在程序实际处理问题过程中,忙时会有成千上万的任务需要被执行,闲时可能只有零星任务。那么在成千上万个任务需要被执行的时候,我们就需要去创建成千上万个进程么?首先,创建进程需要消耗时间,销毁进程也需要消耗时间。第二即便开启了成千上万的进程,操作系统也不能让他们同时执行,这样反而会影响程序的效率。因此我们不能无限制的根据任务开启或者结束进程。那么我们要怎么做呢?
在这里,要给大家介绍一个进程池的概念,定义一个池子,在里面放上固定数量的进程,有需求来了,就拿一个池中的进程来处理任务,等到处理完毕,进程并不关闭,而是将进程再放回进程池中继续等待任务。如果有很多任务需要执行,池中的进程数量不够,任务就要等待之前的进程执行任务完毕归来,拿到空闲进程才能继续执行。也就是说,池中进程的数量是固定的,那么同一时间最多有固定数量的进程在运行。这样不会增加操作系统的调度难度,还节省了开闭进程的时间,也一定程度上能够实现并发效果。
Pool([numprocess [,initializer [, initargs]]]):创建进程池 1 numprocess:要创建的进程数,如果省略,将默认使用cpu_count()的值 2 initializer:是每个工作进程启动时要执行的可调用对象,默认为None 3 initargs:是要传给initializer的参数组 相关方法 1 p.apply(func [, args [, kwargs]]):在一个池工作进程中执行func(*args,**kwargs),然后返回结果。 2 '''需要强调的是:此操作并不会在所有池工作进程中并执行func函数。如果要通过不同参数并发地执行func函数,必须从不同线程调用p.apply()函数或者使用p.apply_async()''' 3 4 p.apply_async(func [, args [, kwargs]]):在一个池工作进程中执行func(*args,**kwargs),然后返回结果。 5 '''此方法的结果是AsyncResult类的实例,callback是可调用对象,接收输入参数。当func的结果变为可用时,将理解传递给callback。callback禁止执行任何阻塞操作,否则将接收其他异步操作中的结果。''' 6 7 p.close():关闭进程池,防止进一步操作。如果所有操作持续挂起,它们将在工作进程终止前完成 8 9 P.jion():等待所有工作进程退出。此方法只能在close()或teminate()之后调用
import os,time from multiprocessing import Pool def work(n): print('%s run' %os.getpid()) time.sleep(3) return n**2 if __name__ == '__main__': p=Pool(3) #进程池中从无到有创建三个进程,以后一直是这三个进程在执行任务 res_l=[] for i in range(10): res=p.apply(work,args=(i,)) # 同步调用,直到本次任务执行完毕拿到res,等待任务work执行的过程中可能有阻塞也可能没有阻塞 # 但不管该任务是否存在阻塞,同步调用都会在原地等着 print(res_l)
import os import time import random from multiprocessing import Pool def work(n): print('%s run' %os.getpid()) time.sleep(random.random()) return n**2 if __name__ == '__main__': p=Pool(3) #进程池中从无到有创建三个进程,以后一直是这三个进程在执行任务 res_l=[] for i in range(10): res=p.apply_async(work,args=(i,)) # 异步运行,根据进程池中有的进程数,每次最多3个子进程在异步执行 # 返回结果之后,将结果放入列表,归还进程,之后再执行新的任务 # 需要注意的是,进程池中的三个进程不会同时开启或者同时结束 # 而是执行完一个就释放一个进程,这个进程就去接收新的任务。 res_l.append(res) # 异步apply_async用法:如果使用异步提交的任务,主进程需要使用jion,等待进程池内任务都处理完,然后可以用get收集结果 # 否则,主进程结束,进程池可能还没来得及执行,也就跟着一起结束了 p.close() p.join() for res in res_l: print(res.get()) #使用get来获取apply_aync的结果,如果是apply,则没有get方法,因为apply是同步执行,立刻获取结果,也根本无需get


 浙公网安备 33010602011771号
浙公网安备 33010602011771号