5轨迹优化
Introduction
为什么需要平滑轨迹呢
•适合自主移动。
•速度/高阶动力学状态不能突变。
•机器人不能在转弯时停下来。
•节约能源。
为啥需要轨迹生成/优化
问:我们有前端(寻径),为什么必须有后端(轨迹生成)?
见上
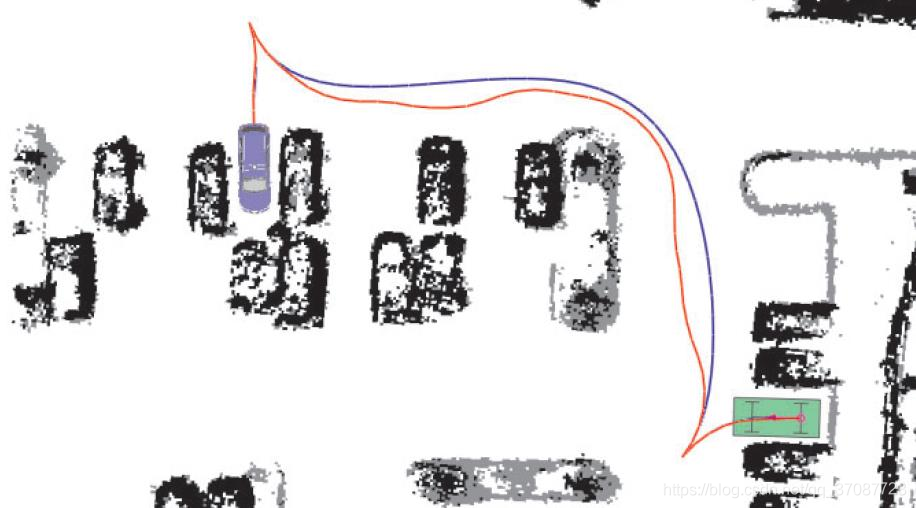
问:前端是动态可行的,为什么后端必须要存在
如蓝色为优化的轨迹,更适合汽车的运动
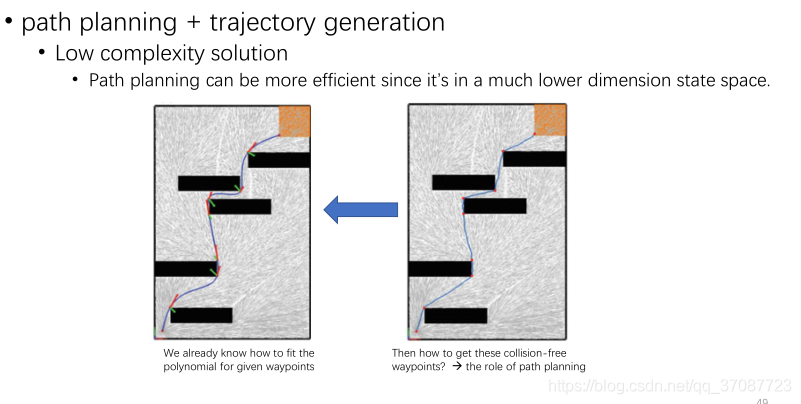
平滑的轨迹生成
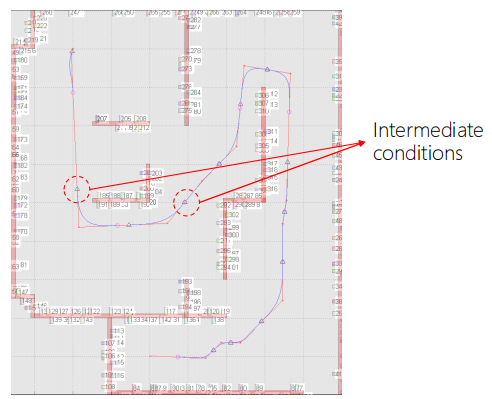
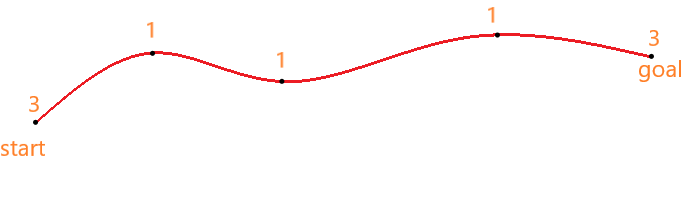
- 边界条件:起点、目标位置(方向)
- 中间条件:中继节点waypoint,位置(方向)
- 通过路径规划(A*, RRT*等)可以找到路标点(中继节点)
- 平滑度评价函数
- 通常转化为 "最小化输入变化率" 的问题
Minimum Snap Optimization
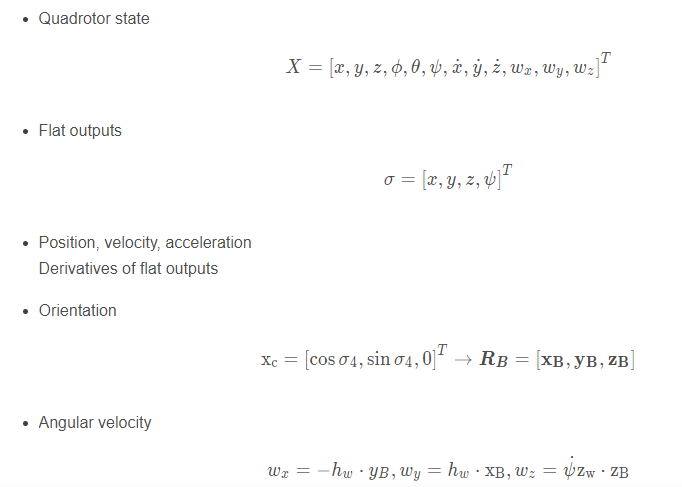
微分平坦(Differential Flatness)
四旋翼飞行器的状态和输入可以写成代数函数组合,也就是四种仔细选择的平面输出及其导数
-
能够自动生成轨迹
-
平坦输出空间中的任何光滑轨迹(具有合理有界导数(不会快速发散))都可以被欠驱动的四轴飞行器跟随。
-
a possible choice

Ψ偏航角
- θ 俯仰角
ϕ 横滚角 -
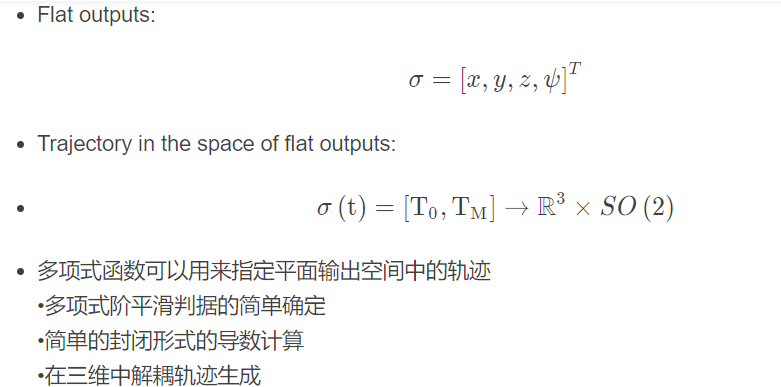
平坦输出空间的轨迹

T0,TM时间段,定义R3×SO(2)
-
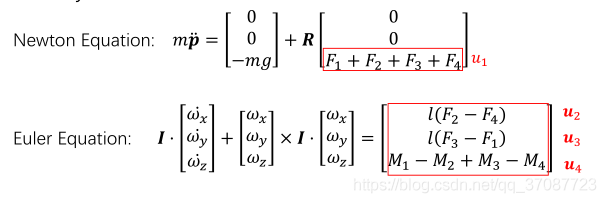
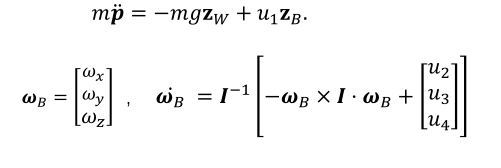
Quadrotor dynamics
- Nonlinear dynamics
-
- 转动方程 Euler Equation
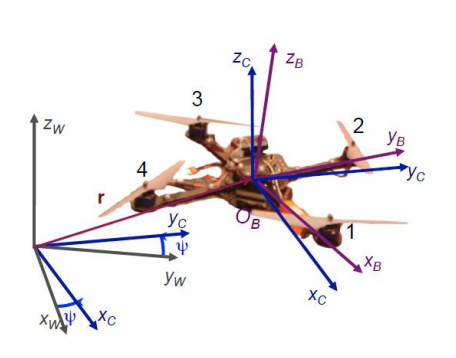
- where R 旋转矩阵,w世界坐标系 B 物体坐标系 l力臂长度
note : 无人机产生的推力方向只能够垂直于桨叶平面
quadrotor states
- 位置,方向,线速度,角速度(在物体坐标系下)

需要高维空间的变量整理成低维空间的变量,主要的思路是通过,位置和一个偏航角去表示这12个状态
- 运动方程:等价于上面两个方程 Newton &Euler Equation
-
note:位置、速度和加速度只是平面输出的导数,一般选择加速度做优化,机器人的姿态没有优化
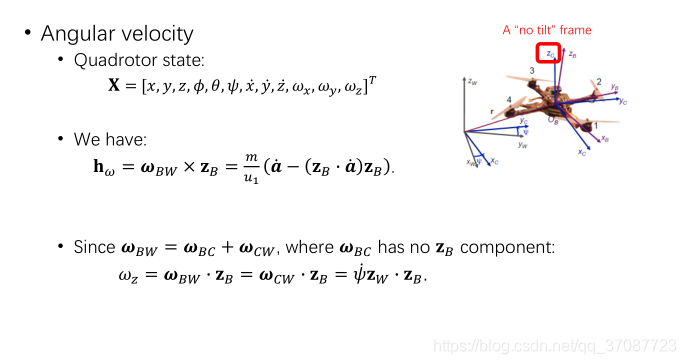
[参考论文](Minimum Snap Trajectory Generation and Control for Quadrotors , Daniel Mellinger and Vijay Kumar)Orientation(方向)

zB为合加速度的单位向量,t使用x , y , z 的二阶导和重力加速度表示
Angular velocity(角速度)

Summary
Close the planning-control loop

通过轨迹规划得到的位置信息p_des速度信息(位置信息的导数),加速度信息(位置信息的二阶导)和偏航角输入位置控制器,计算出推力u 1 和姿态信息,
将姿态信息输入姿态控制器解算出三个方向的力矩u2 , u3 , u4 同完成对无人机的控制。
polynomial Trajectories
Minimum-snap
Smooth 1D Trajectory

可以参看 路径跟踪-曲线插值法文章理解
- 平滑直线段的角。
•首选恒速运动。
•首选零加速度。 - 需要特殊处理短段。
Optimization-based Trajectory Generation
在平面输出空间中显式地最小化某些导数
translation(线性方向)
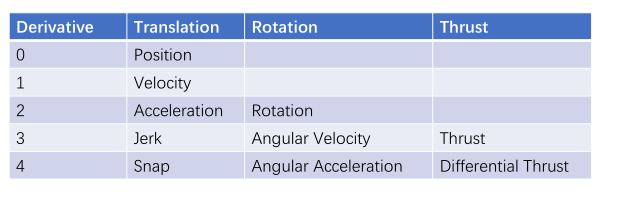
minimum snap trajectory 可以理解为最小化加加加速度轨道
关于牛顿第二定律深度理解:
Jerk: 所受力的变化率。(如每秒增加一牛顿)
snap: 所受力的变化率的变化。(如前一秒增加一牛顿,接下来一秒增加两牛顿,第二秒受力与最初相比增加了三牛顿)
最小snap,就让jerk变化比较小。如果snap为0,就代表每秒加速度稳定增加(受力稳定增加)
在平面输出空间中显式地最小化某些导数
•最小冲击:最小角速度,良好的视觉跟踪
•最小弹跳:最大差动推力,节省能源
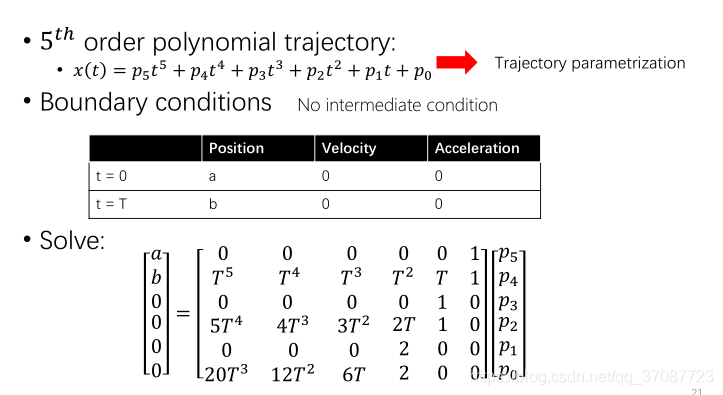
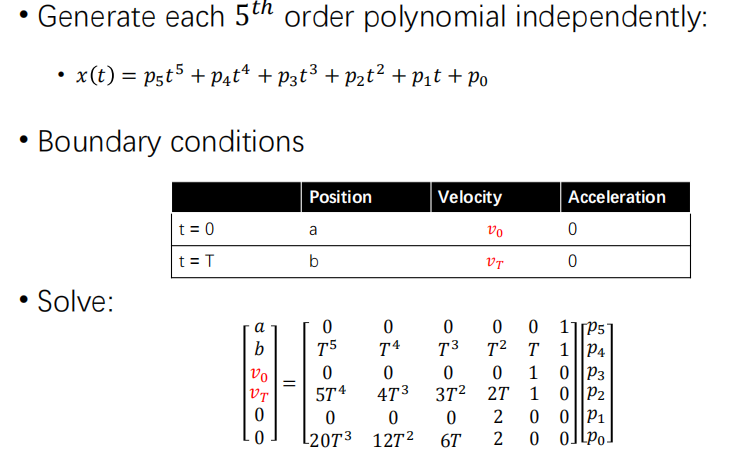
NOTE:如果是针对minimum jerk,则需要提供位置,速度,加速度3个状态量。如果只考虑起点和终点,则有2 ∗ 3 = 6 个状态。同时考虑多项式形式包含有x0(也就是常数项),所以最终多项式的次数N=5
同样的道理,如果minimum snap,则需要提供位置,速度,加速度,以及加速度变化率,4个状态量。所以N = 2 ∗ 4 − 1 = 7 。
Note2: 如果考虑多段的情况,例如K段,则minimum jerk ,需要 (k-1) +3 +3= k+5 , 这里只要求能够连续的到达中间点,至于以怎样的速度,怎样的加速度到达这个点,是优化出来的,不属于约束 。、
假设每一段的阶数为N ,则每一段轨迹所能提供的自由度为N+1。N阶多项式可以提供N次导数,加上原多项式,即为N+1。 所以,总计 (N+1)*k.
(N+1)*k>= k+5. 则 N_{min} = 5/k. 表明段数越多,则提供的阶次越低。
每一个分段都是多项式;每个分段的多项式都是相同的阶次,这样对于问题的求解比较简单;每一段的时间间隔都是已知的(也可以不已知,但那就是优化时间间隔的问题了)

Multi-segment minimum-snap trajectory
一个多项式曲线过于简单,一段复杂的轨迹很难用一个多项式表示,所以将轨迹按时间分成多段,每段各用一条多项式曲线表示,形如:

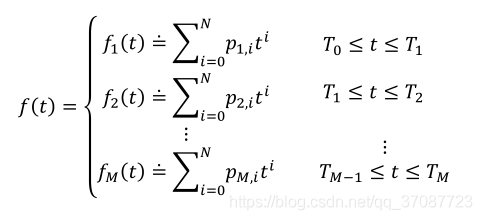
M为轨迹的段数,i指一段的第几项(0,N)
Minimum Snap的最小化目标函数为snap(jerk的导数,jerk为加速度的导数),对于一段轨迹,最小化jerk选择的阶数为5(2x3-1),3个未知量分别为位置、速度、加速度),最小化snap选择的阶数为7(2x4-1),4个未知量分别为位置、速度、加速度、jerk)。实际过程中,考虑最坏情况,k段距离阶数的选择与1段轨迹相同。
每一段都是一个多项式。
•不需要确定阶次,但保持相同的阶次可以使问题更简单。
•必须知道每个段的时间长度!
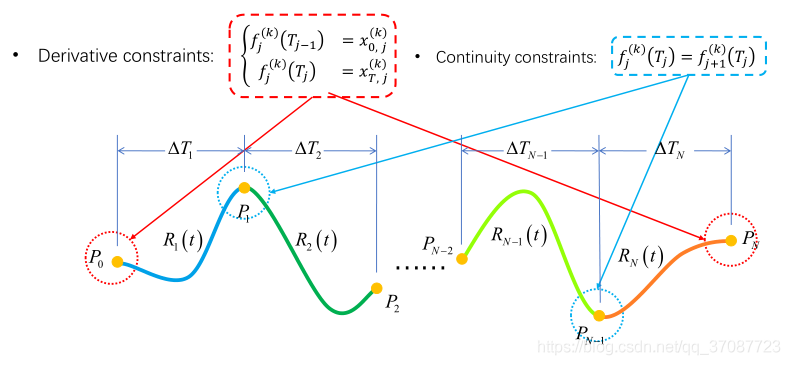
constraints
导数约束
局部连续约束
- different timeline

时间分配的方法:匀速分配或梯形分配,假设每段polynomial内速度满足匀速或梯形速度变化,根据每段的距离将总时间T分配到每段。
这里的轨迹分段和时间分配都是初始分配,在迭代算法中,如果corridor check和feasibility check不满足条件,会插点或增大某一段的时间
用的是后一种
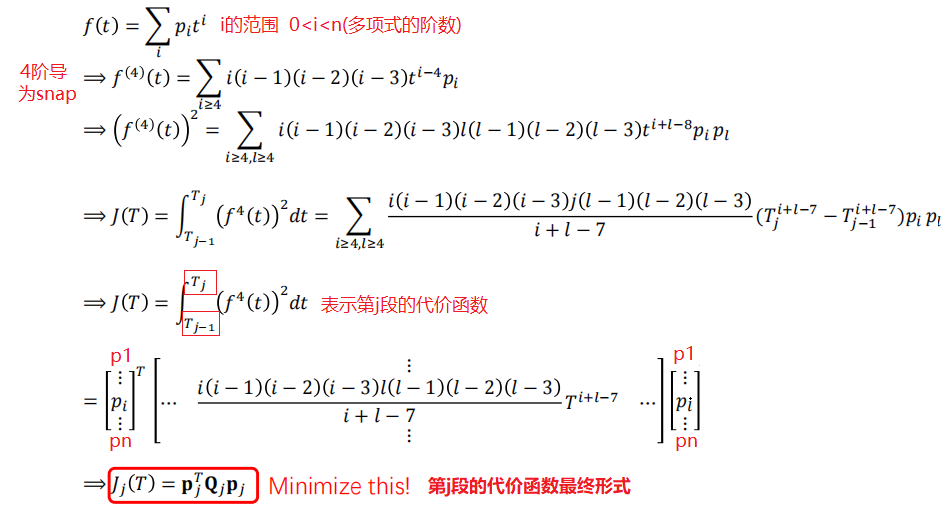
Objective function

其中第j段多项式段的成本函数:最终要将整个路径(分成多段)的成本函数最终形式表示出来(主要得到Q)
function Q = getQ(n_seg, n_order, ts)
Q = [];
for k = 1:n_seg
Q_k = zeros(n_order + 1, n_order + 1);
%#####################################################
% STEP 1.1: 计算第k段的矩阵Q_k
for i = 4:n_order
for j = 4:n_order
Q_k(i+1,j+1) = factorial(i)/factorial(i-4)*factorial(j)/factorial(j-4)/(i+j-n_order)*ts(k)^(i+j-n_order);
end
end
Q = blkdiag(Q, Q_k);
end
end
- 导数约束(A 的构建)
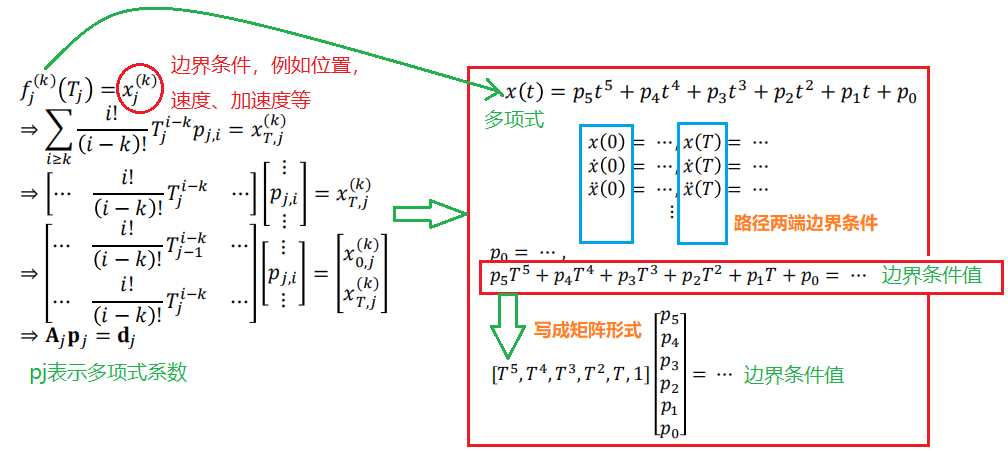
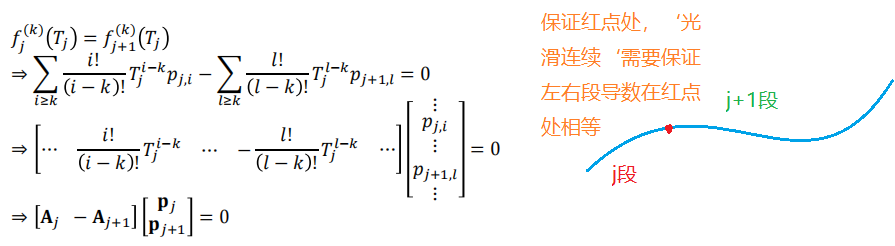
整理得到最终的约束问题,每一段都是相关的二次型;从而转化为标准的凸优化问题
Aeq∗P=deq(beq)
function [Aeq beq]= getAbeq(n_seg, n_order, waypoints, ts, start_cond, end_cond)
n_all_poly = n_seg*(n_order+1);
%#####################################################
% p,v,a,j 的起点约束,
Aeq_start = zeros(4, n_all_poly);
% STEP 2.1: write expression of Aeq_start and beq_start
Aeq_start(1:4,1:8) = getCoeffCons(0);
beq_start = start_cond';
%#####################################################
% p,v,a,j 的终端约束
Aeq_end = zeros(4, n_all_poly);
t = ts(end);
Aeq_end(1:4, end-7:end) = getCoeffCons(t);
beq_end = end_cond';
%#####################################################
% 中点的位置约束
Aeq_wp = zeros(n_seg-1, n_all_poly);
beq_wp = zeros(n_seg-1, 1);
for k = 0:1:n_seg-2
beq_wp(k+1, 1) = waypoints(k+2);
coeff = getCoeffCons(ts(k+1));
Aeq_wp(k+1, 1+k*8:8+k*8) = coeff(1, :);
end
%#####################################################
% 连续性约束
Aeq_con_p = zeros(n_seg-1, n_all_poly);
beq_con_p = zeros(n_seg-1, 1);
Aeq_con_v = zeros(n_seg-1, n_all_poly);
beq_con_v = zeros(n_seg-1, 1);
Aeq_con_a = zeros(n_seg-1, n_all_poly);
beq_con_a = zeros(n_seg-1, 1);
Aeq_con_j = zeros(n_seg-1, n_all_poly);
beq_con_j = zeros(n_seg-1, 1);
Aeq_con = [Aeq_con_p; Aeq_con_v; Aeq_con_a; Aeq_con_j];
beq_con = [beq_con_p; beq_con_v; beq_con_a; beq_con_j];
for k = 0:1:n_seg-2
Aeq_con(1+4*k:4+4*k,1+8*k:8+8*k) = getCoeffCons(ts(k+1));
Aeq_con(1+4*k:4+4*k,1+8*(k+1):8+8*(k+1)) = -getCoeffCons(0);
end
%#####################################################
% 构造约束矩阵
Aeq = [Aeq_start; Aeq_end; Aeq_wp; Aeq_con];
beq = [beq_start; beq_end; beq_wp; beq_con];
end
function coeff = getCoeffCons(t)
coeff = [1, 1*t, 1*t^2, 1*t^3, 1*t^4, 1*t^5, 1*t^6, 1*t^7;
0, 1, 2*t, 3*t^2, 4*t^3, 5*t^4, 6*t^5, 7*t^6;
0, 0, 2, 6*t, 12*t^2, 20*t^3, 30*t^4, 42*t^5;
0, 0, 0, 6, 24*t, 60*t^2, 120*t^3,210*t^4];
end
%main
clc;clear;close all;
path = ginput() * 100.0;
n_order = 7;% order of poly
n_seg = size(path,1)-1;% segment number
n_poly_perseg = (n_order+1); % coef number of perseg
ts = zeros(n_seg, 1);
% calculate time distribution in proportion to distance between 2 points
% dist = zeros(n_seg, 1);
% dist_sum = 0;
% T = 25;
% t_sum = 0;
%
% for i = 1:n_seg
% dist(i) = sqrt((path(i+1, 1)-path(i, 1))^2 + (path(i+1, 2) - path(i, 2))^2);
% dist_sum = dist_sum+dist(i);
% end
% for i = 1:n_seg-1
% ts(i) = dist(i)/dist_sum*T;
% t_sum = t_sum+ts(i);
% end
% ts(n_seg) = T - t_sum;
% or you can simply set all time distribution as 1
for i = 1:n_seg
ts(i) = 1.0;
end
poly_coef_x = MinimumSnapQPSolver(path(:, 1), ts, n_seg, n_order);
poly_coef_y = MinimumSnapQPSolver(path(:, 2), ts, n_seg, n_order);
% display the trajectory
X_n = [];
Y_n = [];
k = 1;
tstep = 0.01;
for i=0:n_seg-1
%#####################################################
% STEP 3: get the coefficients of i-th segment of both x-axis
% and y-axis
for t = 0:tstep:ts(i+1)
X_n(k) = polyval(Pxi, t);
Y_n(k) = polyval(Pyi, t);
k = k + 1;
end
end
plot(X_n, Y_n , 'Color', [0 1.0 0], 'LineWidth', 2);
hold on
scatter(path(1:size(path, 1), 1), path(1:size(path, 1), 2));
function poly_coef = MinimumSnapQPSolver(waypoints, ts, n_seg, n_order)
start_cond = [waypoints(1), 0, 0, 0];
end_cond = [waypoints(end), 0, 0, 0];
%#####################################################
% STEP 1: compute Q of p'Qp
Q = getQ(n_seg, n_order, ts);
%#####################################################
% STEP 2: compute Aeq and beq
[Aeq, beq] = getAbeq(n_seg, n_order, waypoints, ts, start_cond, end_cond);
f = zeros(size(Q,1),1);
poly_coef = quadprog(Q,f,[],[],Aeq, beq);
end
Convex Optimization
Convex function and convex set
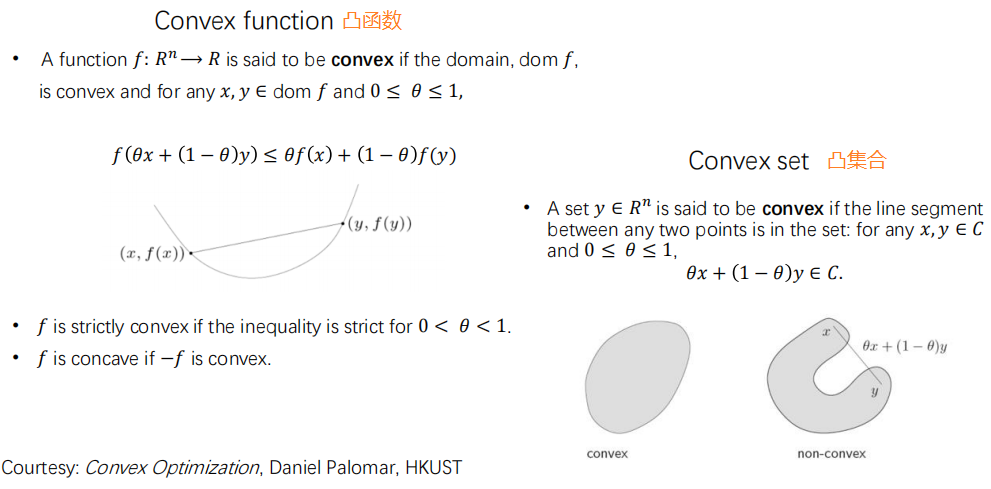
一个函数是严格凸函数当且仅当条件二和x = y时才取等号
参考自:Convex Optimization,Daniel Palomar,HKUST
如果在一个集合任意连接一条线,如果都在集合内,那便是凸集
优化与凸优化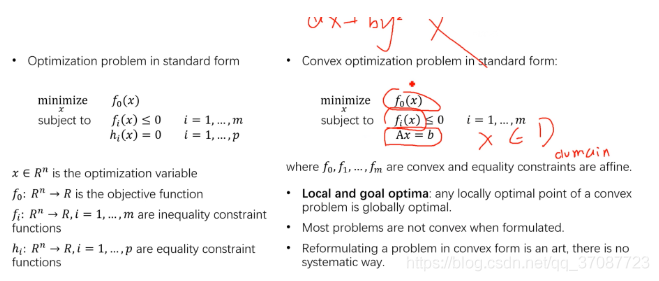
师曰:将一个问题转化一个凸优化问题没有系统化方法
凸优化问题求解
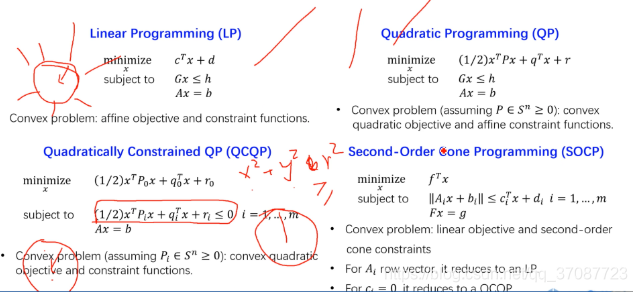
范围:SOCP>QCQP>QP SOCP>LP
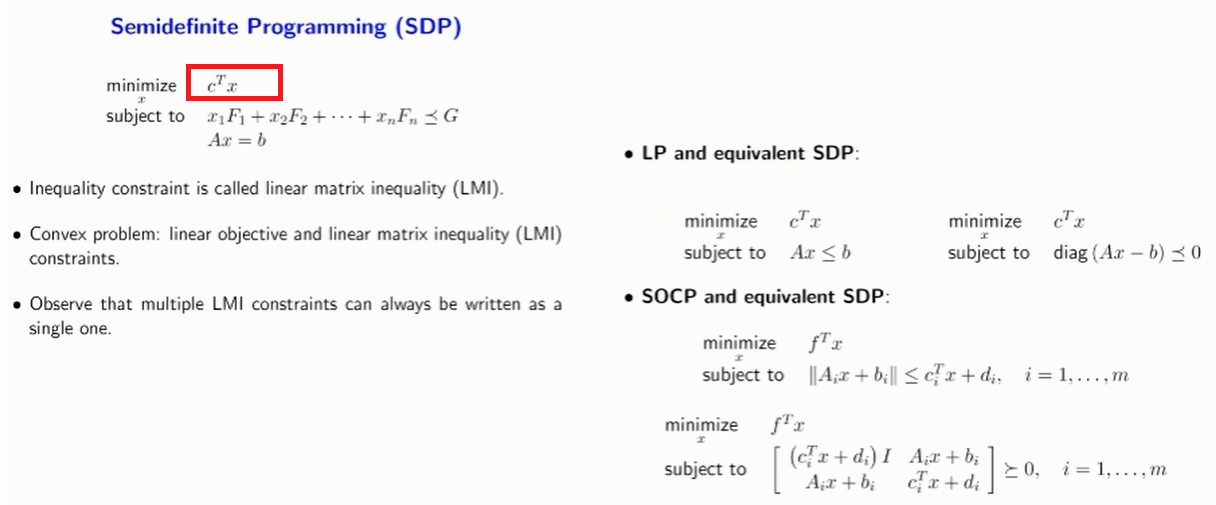
SDP可以覆盖前面所有问题,一般planning问题转化到
上面几个问题便可以求解了
MiniMum-snap求闭式解
Decision variable mapping
优化变量的映射
- 多项式轨迹的直接优化是数值不稳定的,对多项式系数p,可以针对多个点(有物理意义)
- 首选改变变量的映射,而不是优化线段端点导数
-
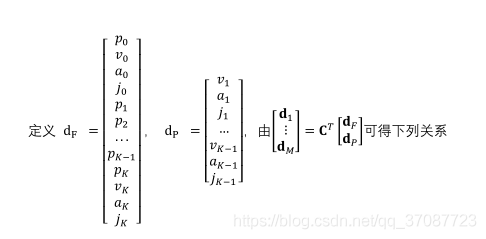
我们有M j p j = d j ,p j = M j − 1 d j,其中𝑴j是一个映射矩阵,它将多项式系数映射到导数,优化路标点的v,a

给出一个构建M矩阵的例子如下:P->M
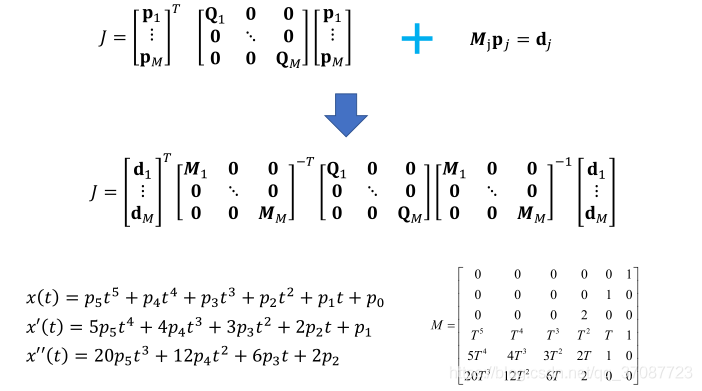
可以看出M可以通过将某段轨迹初始时刻t=0(上三行)和末尾时刻t=T(下三行)代入上式得到。
只考虑p,v,a的话,M的表达式如下
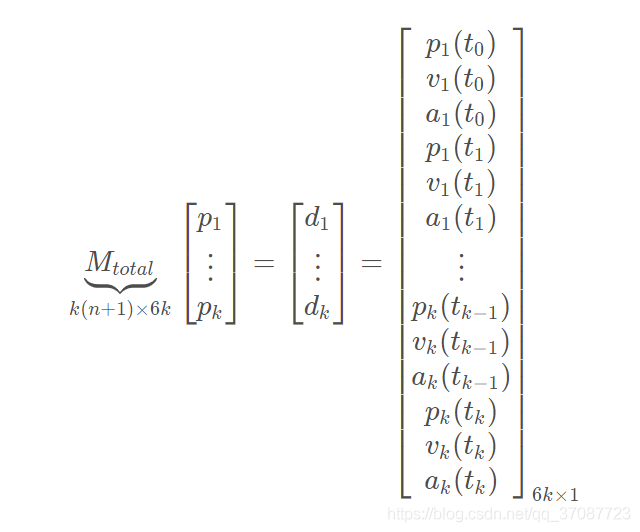
Mtotal 是已知的(怎么构造可参见文章一种的等式约束构造方法),而 d 中只有少部分(起点、终点的pva等)是已知的,其他大部分是未知的。如果能够求出d ,那么轨迹参数可以通过 p=M−1 d
参考:Polynomial Trajectory Planning for Aggressive Quadrotor Flight in Dense Indoor Environments , Charles Richter, Adam Bry, and Nicholas Roy
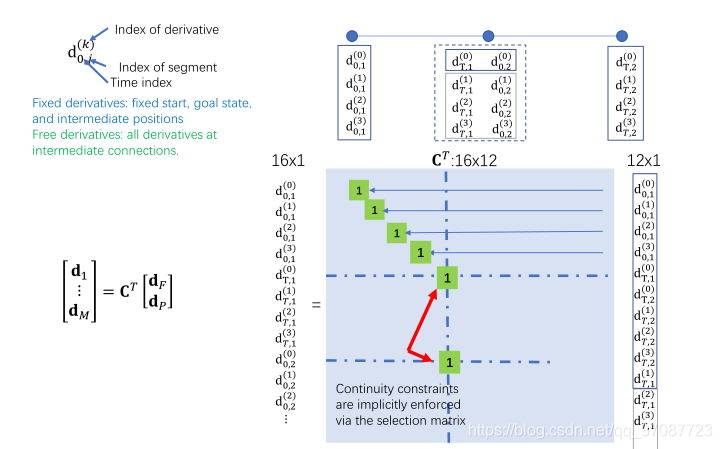
fixed(constrained) and free variable separation
使用选择矩阵C来分离自由(dP)和受约束(dF)变量
自由变量:未指定的导数,仅由连续性约束强制执行,即
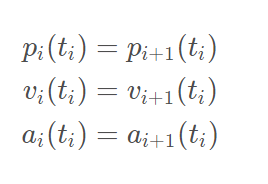

对R进行分块
转化成一个可以求解的无约束二次规划
封闭的形式:

对dp求偏导为0,求J的最优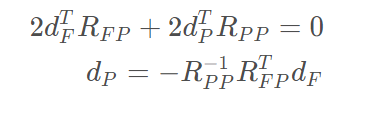
对于两段轨迹,构造CT ,如图所示,相应变量对应即可映射矩阵C
- same result as convex optimization
Hierachical approach(用于无人机)
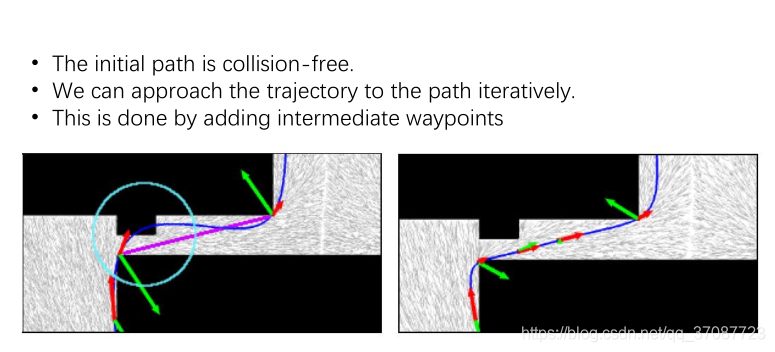
trajectory optimazition considering obstacle
发生碰撞就在中间加入路标点,不断加入直至没有碰到障碍物optimazition
better solutions
-
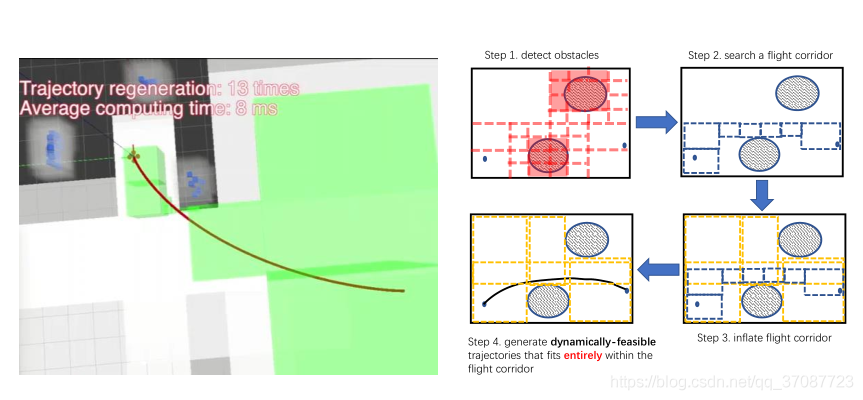
Smooth Trajectory Generation with Guaranteed Obstacle Avoidance
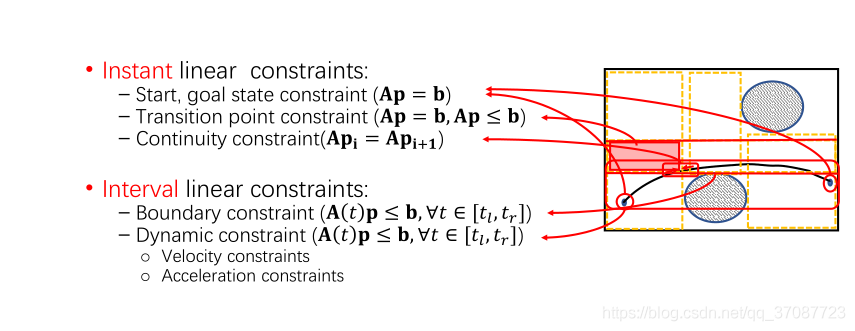
- How to make constraints globally activated
迭代地检查极值并添加额外的约束。
- 迭代求解非常耗时。
- 如果严格没有可行的解决方案满足所有约束。
我们必须运行10次迭代来确定解决方案的状态
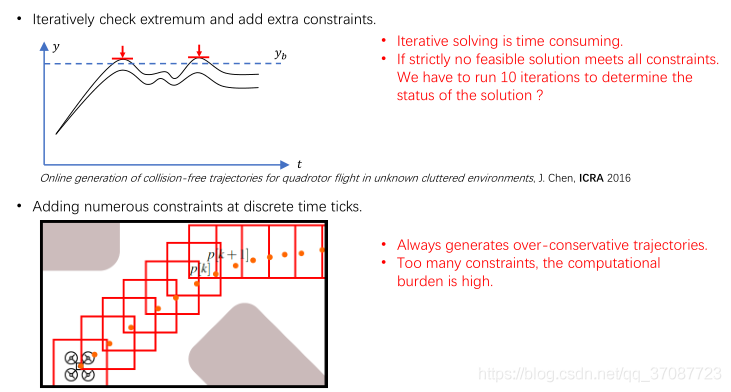
-
添加多个约束
-
总会产生过于保守的轨迹。
-
约束太多,计算量大。
论文
Online generation of collision-free trajectories for quadrotor flight in unknown cluttered environments , J. Chen, ICRA 2016
A hybrid method for online trajectory planning of mobile robots in cluttered environments , L Campos-Macías, RAL 2017
Implementation Details
convex solvers
- 我们的目标式制定一个轨迹生成问题转化为凸优化约束
- 许多现成的方法(off-the-shelf)能帮我们解决这个问题
- 根据需要选择一个求解器
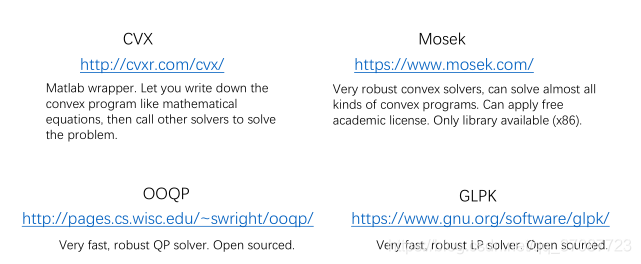
CVX 数学公式直接表达
Mosek 功能全面
OOQP QP问题 代码开源
GLPK LP问题
Numerical Stability
Normalization
首先是时间的标准化
在很小间隔的时间段内不生成轨迹
将短期持续时间缩放到一个(1,0)区间里的数(归一化),或者将比例因子添加到曲线的所有部分
note: 使用相对坐标轴
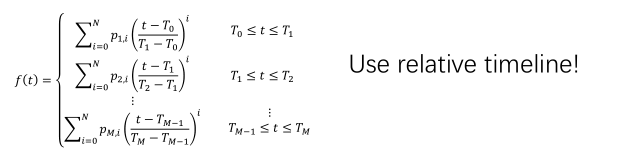
然后是尺度(空间)的标准化
适应条件是处于大规模的场景,如waypoint x = 100.0 m x=100.0mx=100.0m情况,使得我们仅需要考虑一个小问题(沙盒),重新调整解决方案
这两种操作大大提高了实际计算的稳定性。
Other engineering stuff
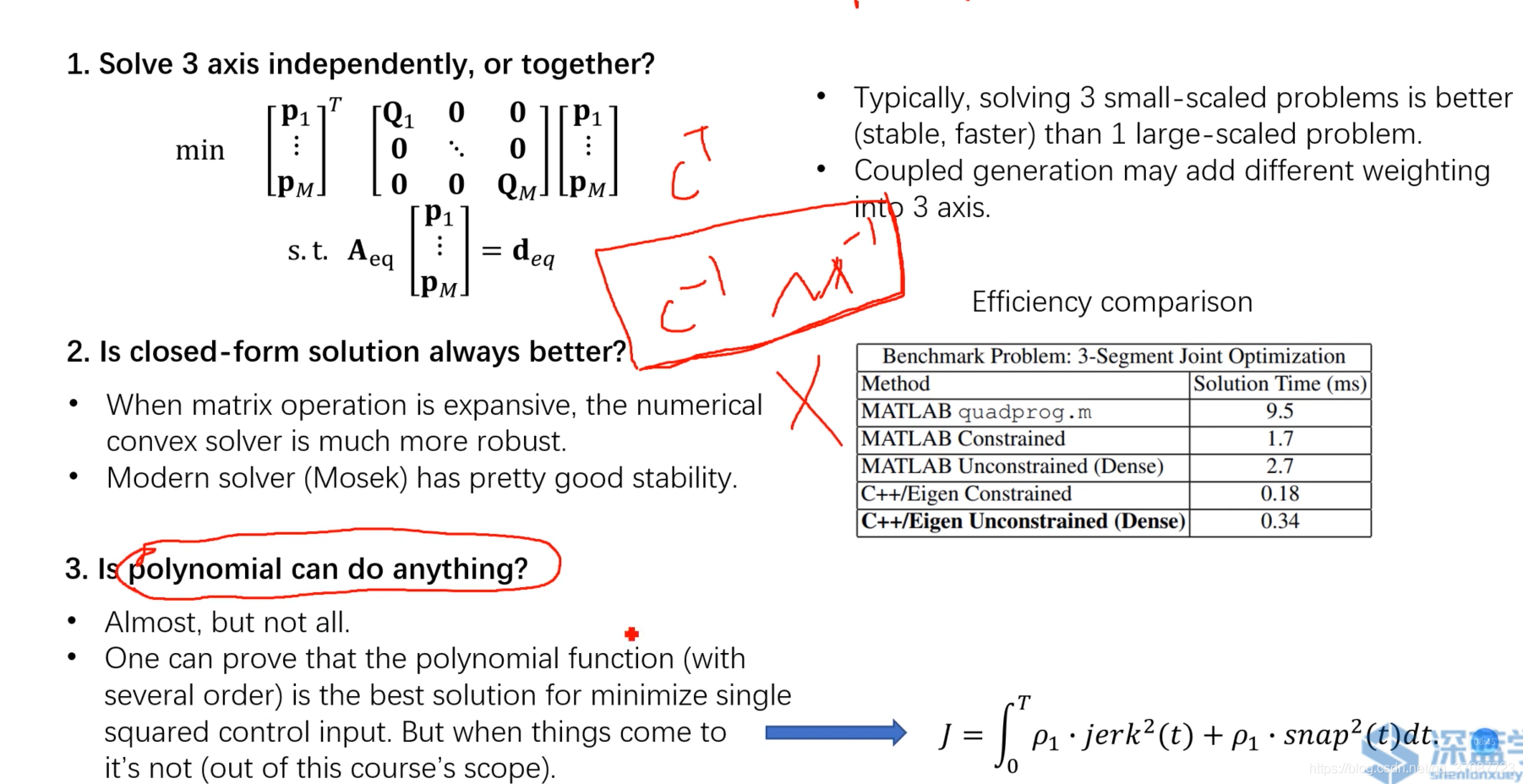
要不要3轴独立去解?通常求解要好一点
闭式解是不是更好?这个计算力较大,一般商用不会用,会用QP去求数值解
多项式是不是最优表达?如果仅是jerk 或者snap ,那么就是最优解
Time Allocation
Problem Definition
- 分段轨迹取决于分段时间分配。
时间分配显著影响最终轨迹。
如何合理分配时间?
Naive solution
使用“梯形速度”时间剖面来获得每个片段的时间持续时间。
•假设在每一块上,加速到最大值,速度→减速为0。
•加速度+ 最大速度+ de-accelerate。
•使用预期的平均速度来获得每个部件的持续时间。

缺点
- 离最佳状态还很远。
•只获取保守的时间配置。
•对环境风格没有反应
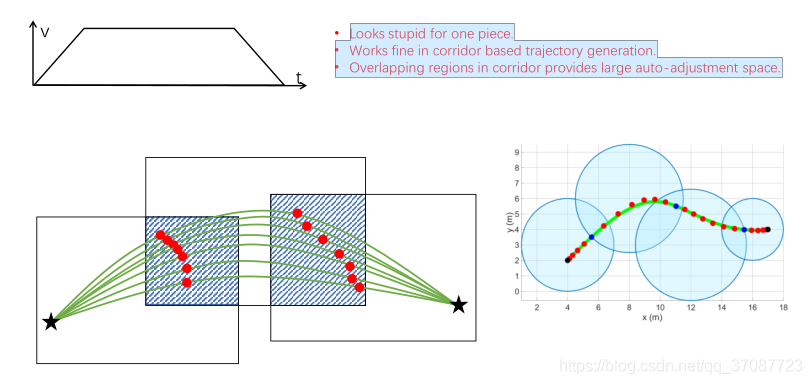
允许路标点交叠区域移动
论文:Online generation of collision-free trajectories for quadrotor flight in unknown cluttered environments , J. Chen, ICRA 2016
Fast, dynamic trajectory planning for a dynamically stable mobile robot , M. Shomin, IROS 2014
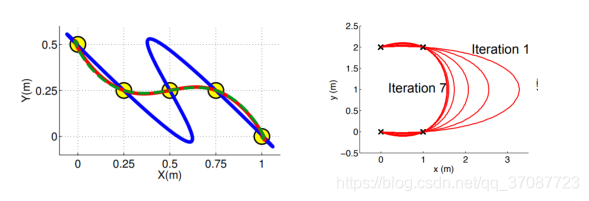
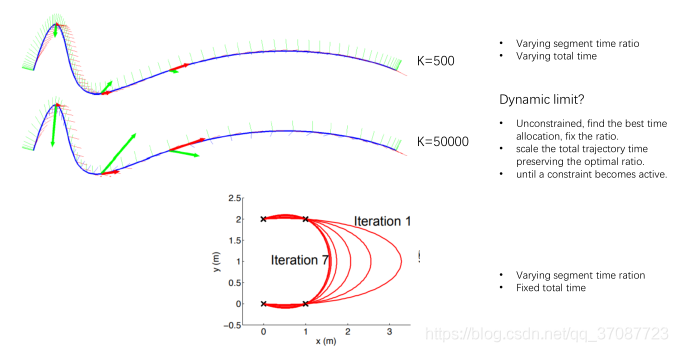
Iterative numerical solution
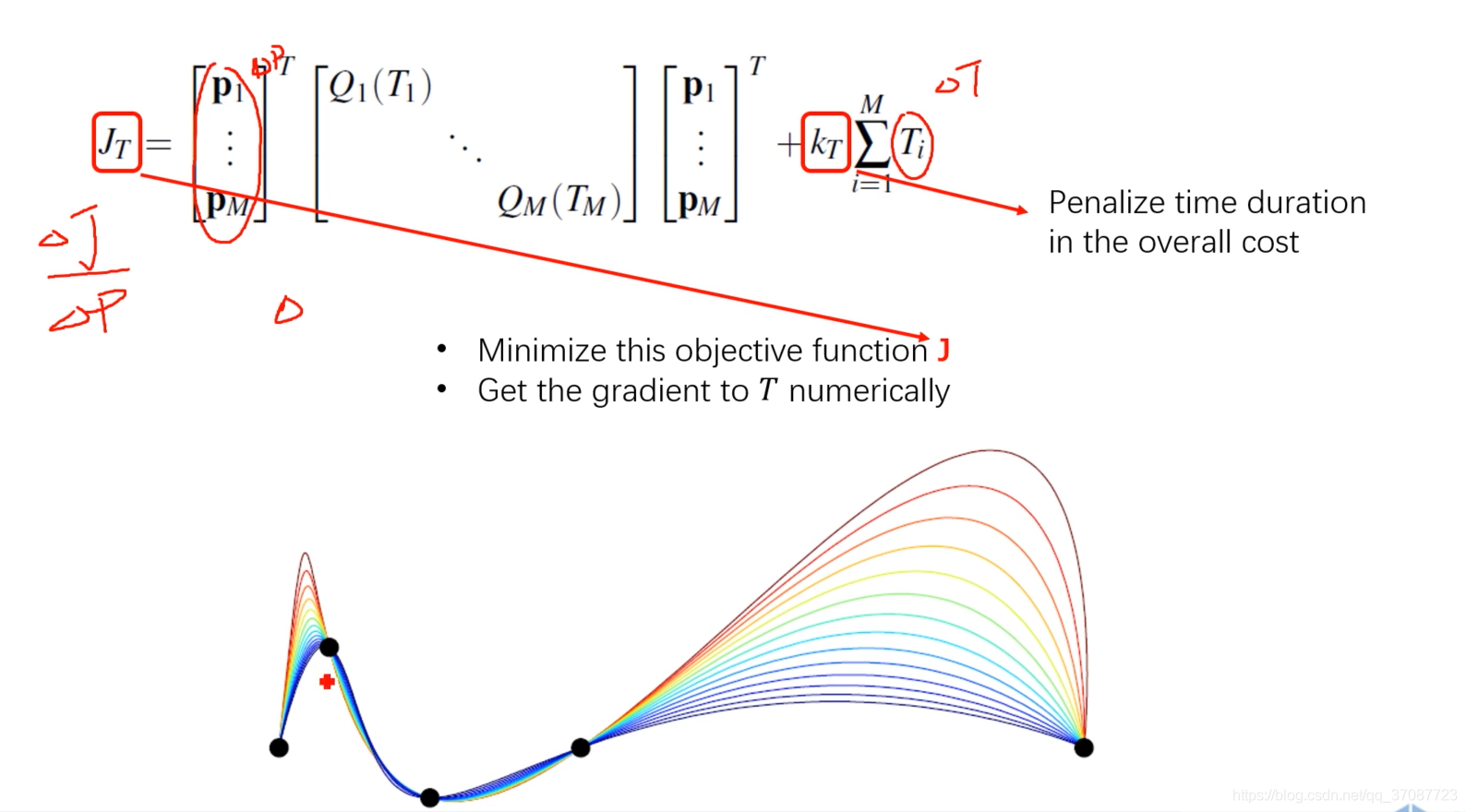
不能优化到最优解,只能够求数值的导数,计算耗时间,不能解析式求导
Homework
题目
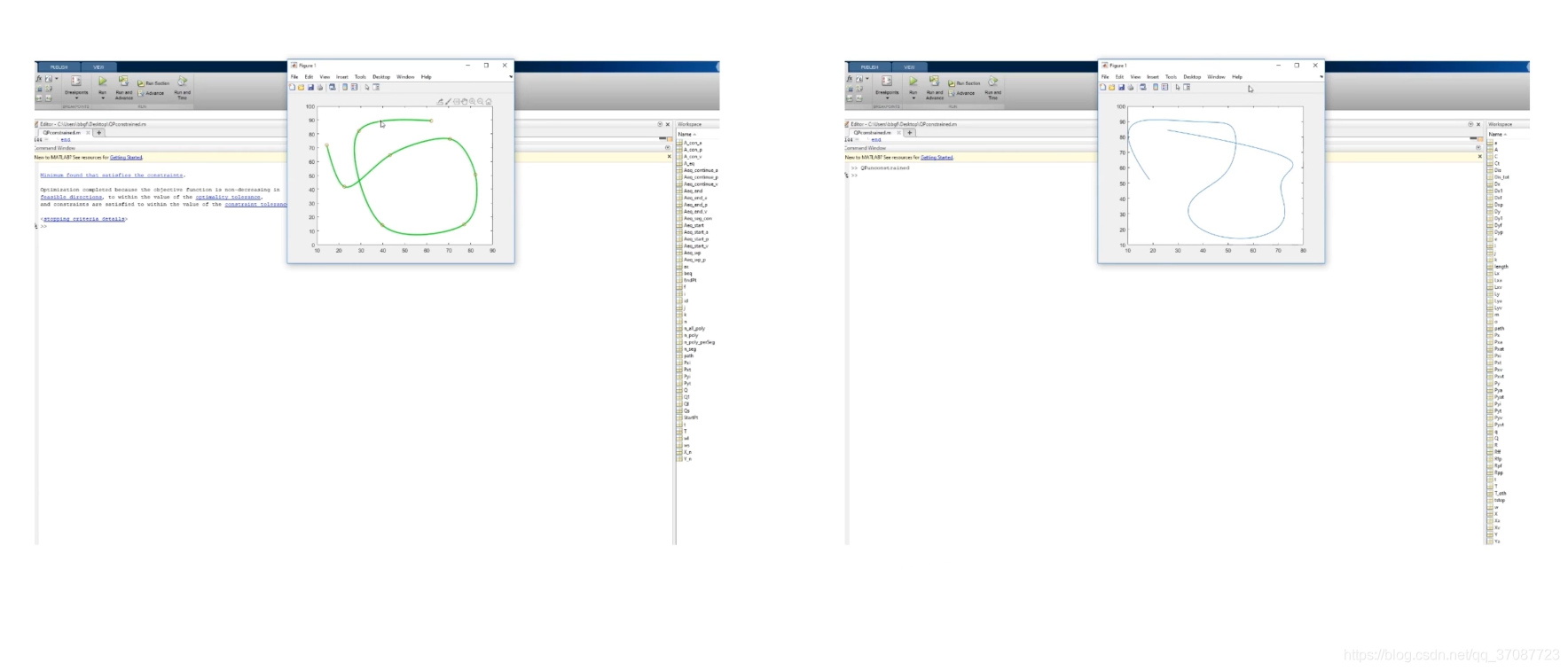
作业1.1:在matlab中,使用“quadprog”QP求解器,写下一个Minisnap轨迹生成器
作业1.2:在matlab中,根据闭合解生成Minisnap轨迹
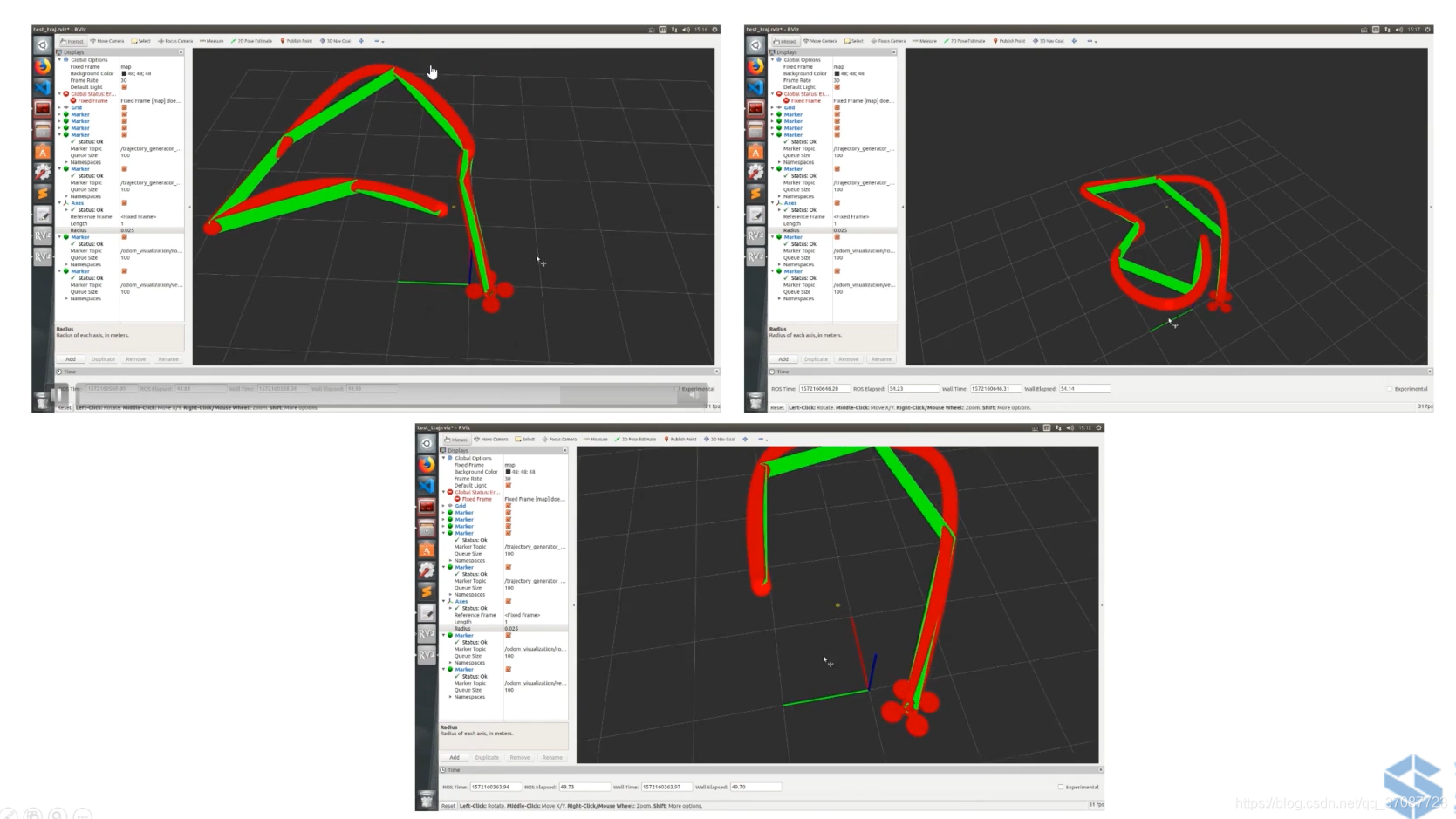
作业2.1:在c++ /ROS中,使用OOQP求解器,写下一个最小snap轨迹生成器
作业2.2:在c++ /ROS中,利用Eigen,基于闭式求解解生成最小snap轨迹
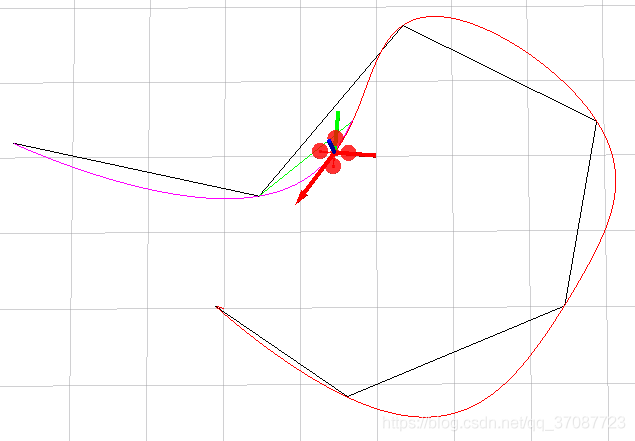
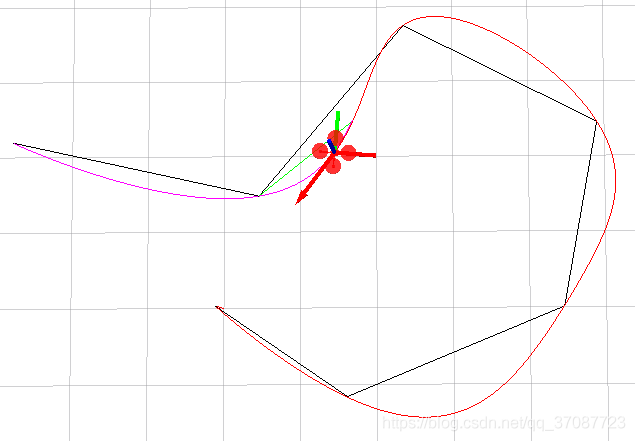
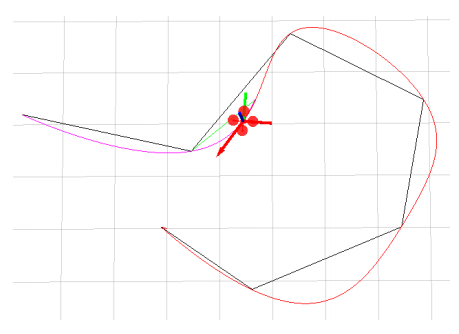
结果
参考:https://blog.csdn.net/qq_37087723/article/details/115859746

 浙公网安备 33010602011771号
浙公网安备 33010602011771号