利用Hough变换识别图像中的直线
引入
近期看到2015年数学建模A题太阳影子定位中的第四问,需要根据附件中视频里的直杆的太阳影子的变化确定拍摄地点。其实确定拍摄地点这个问题并不是十分困难,因为有前三问的铺垫,我们已经得出了太阳影子长度和观测地点的经纬度、时间、直杆高度四个参数之间的关系;所以我们只要知道了直杆太阳影子的长度就可以通过问题2中的优化模型求解出拍摄地点的经纬度了。但是本题难就难在,如何确定视频中直杆的太阳影子的长度?
求解
首先想到的是:将视频处理后,能否通过手动标示像素点来确定直杆的太阳影子的长度,因为可以手动标示的工具较多,如AE中的动态跟踪、PS中的像素点提取、Matlab里的ginput。虽然可以有效的解决直杆的太阳影子长度的测量,但是笔者认为这种人工手动测量的方法的误差较高,且逐个进行测量特别麻烦,且误差可能不够大。不符合笔者比较懒得性格,所以在这里给出自己的一种解法
1.视频的逐分提取
这部分比较简单。
2图像的预处理
图像二值化处理。
3.通过Hough变换
Hough变换是图像处理中从图像识别几何形状的方法。它利用点与线的对偶性,将原始图像空间的给定曲线通过曲线表达形式变为Hough参数空间中的一个点。所以原始图像给定曲线的检测问题就转化为在Hough参数空间的峰值问题,即检测整体特性转化为检测局部特性[7]。
欧式空间中一条直线上的点在Hough参数空间中为一条正弦曲线;欧式空间中同一条直线上的多个点在Hough参数空间中为一个正弦曲线簇且曲线簇相交于一点,称此点为峰值点。而Hough参数空间下的峰值点,则对应了欧式空间下的一条直线。
如图所示,
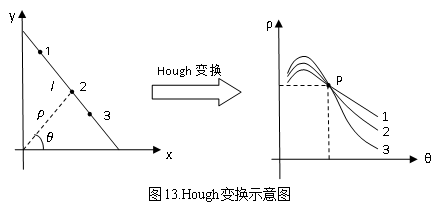
直线l方程为:
在欧式空间中数据点的表示为(x,y),而在Hough参数空间内表示为(ρ,θ),P点即为Hough参数空间中的峰值点,它所表示的含义即为欧式空间的l直线。
下面给出Hough变换的算法:
(1)初始并网格化Hough参数空间
(2)对于欧氏空间中的每个(x,y)执行步骤3;
(3)for θ=-90° to 180°,执行ρ=xcosθ+ysinθ与H(ρ,θ)=H(ρ,θ)+1
(4)设立阈值,寻找参数空间的峰值点。参数空间每一个峰值点对应欧式空间中一条直线。
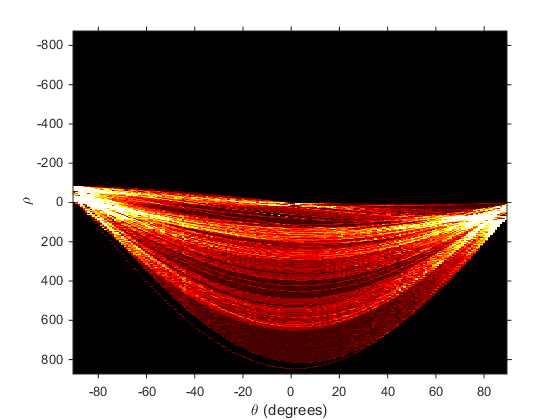
其中每一个网格颜色代表能量高低,颜色越亮表明能量越高,反之能量越低。能量越高的地方,即为所需求解的峰值点。得到峰值点后,通过编程反变换到原图像的RGB值空间中,即可识别出峰值点所对应的直线;直杆影子图像所检测出的直线如图所示:

已知直杆的高度\(h_真\)为2m,通过Hough变换得到了直杆的像素高度\(h_像\)为664.9218像素,同样直杆影子长度\(L_真\)通过Hough变换得到的直杆影子像素长度\(L_像\)为一组像素数据,根据比例关系:
-------------------------------------------
个性签名:一名会音乐、爱健身的不合格程序员
可以Follow博主的Github哦(っ•̀ω•́)っ✎⁾⁾

 浙公网安备 33010602011771号
浙公网安备 33010602011771号