论文阅读2025.10.22 :Constrained Decoding for Robotics Foundation Models
这篇文章是CMU和Toyota InfoTech Lab联合发布的,之前看过一些这个丰田实验室关于时序逻辑的论文(IJRR),印象很深,所以格外关注了这一篇。这是投稿到ICLR上面的文章
文章的网站在https://constrained-robot-fms.github.io/。
端到端模型是这两年比较火热的方向。但是这些模型仍然是数据驱动的,用通俗的话来说就是缺乏可解释性。为了搞定这种所谓的“可解释性”,人们通常会使用形式化语言来描述任务,然后如何使用这种形式化语言通常是一篇paper的重点。那么这篇文章呢用的是比较新颖的方法,引入了一个受限解码框架来解决上面的问题。
1.建模
首先把文章的问题进行数学建模。
1.1 信号时序逻辑 Signal Temporal Logic (STL)
信号时序逻辑是一种描述水平比较高的形式化语言。与LTL不同的是,它处理的是连续的信号而非离散的原子命题(atomic proposition),同时加入了连续的时间限制而非仅仅是时序上的约束。
具体地说,\((s,t)\models \phi\) 表示信号\(s\)在时刻\(t\)满足STL规范 \(\phi\) 。STL规范的原子谓词形式使用不等式 \(\mu(s(t)) \geq 0\) 来表示,也就是说这个值如果是正的就代表原子命题是真的。从语法(syntax)上来说,STL定义如下:
给定一个 \(t\) 时刻的信号 \(s_t\),满足\(s_t\models\phi\)布尔语义定义如下:
除开STL的布尔语义之外,更加新颖的方法往往会使用表现能力更加强的定量语义,使用一个实数值来衡量当前的鲁棒值(stl robustness),和时序逻辑的各项运算符的运算如下:
1.2 Transformer中的约束解码(constrained decoding)
很多基于transformer的自回归模型通过在每个时间步上产生model vocabulary的概率分布。这个概率分布其实就是最后一个hidden layer过一层softmax产生的。之后在解码过程中选择最有可能性的结果。在经典的解码过程中,这种最大化通过贪婪算法或者使用贝叶斯搜索来实现。但是这样往往会导致输出结果的重复性偏高,因此更普遍的做法是使用sampling的方法增大输出的多样性。
文章在这里使用了constrained decoding,用非线性的方法修剪了概率选择,来确保输出的序列满足预定义的约束条件,这里说的约束条件通常是语法上的。如果用数学语言表达的话,可以表示为最大化输出序列 subject to a constraint \(\mathcal{C}:\argmax_{y\in\mathcal{Y}_\mathcal{C}}P(y|x)\),其中 \(\mathcal{Y}_\mathcal{C}\) 是满足 \(\mathcal{C}\)的序列集合。
1.3 Problem Formulation
考虑离散的动态系统,states为\(x_t\in \mathbb{R}^n\), action为\(a_t\in\mathbb{A}\),系统的动态方程为\(x_{t+1}=f(x_t,a_t)\),系统的控制策略根据每个时间步的observation和task context来输出action。我们将控制策略的所有输入整合成一个多模态输入\(\mathcal{I}_t\),这个输入首先通过编码进入到一个 embedding space:\(e_{\mathcal{I}_t}=\mathcal{E}_\mathcal{I}(\mathcal{I}_t)\)
在已知从0到t时刻的encoded inputs,需要使用一个基于transformer、参数记为\(\theta\)的foundation model来预测下面\(T-t\)个actions:
每个输出的action embedding又被解码为 \(\hat{a}_{t+k}\in\mathbb{A}\)。下面考虑给定的任务规范STL公式 \(\varphi\) ,从数学语言上来说,需要满足下面的规范:
当前主流的方法都是通过filter或者直接删掉不合理的actions,但是这样会存在两个问题:一是模型的学习分布失真,从而导致输出并不合理;二是简单删除的操作可能会导致hidden state中因果链被破坏,因此主要考虑的问题就是:如何在RFM的动作生成中强制执行STL规范,是输出序列满足规范的哦那个是忠实于模型的自回归分布(autoregressive distribution) \(\pi(a_{1:T}|\mathcal{I}_{1:T})\)
理想的情况下,constrained distribution可以表示为:
这项工作的主要目标就是找到 \(Q_{\pi, \varphi}\) ,来保证完成规范并忠于原始模型的preference。
2. 规范引导的约束解码(Specification-Guided Constrained Decoding)
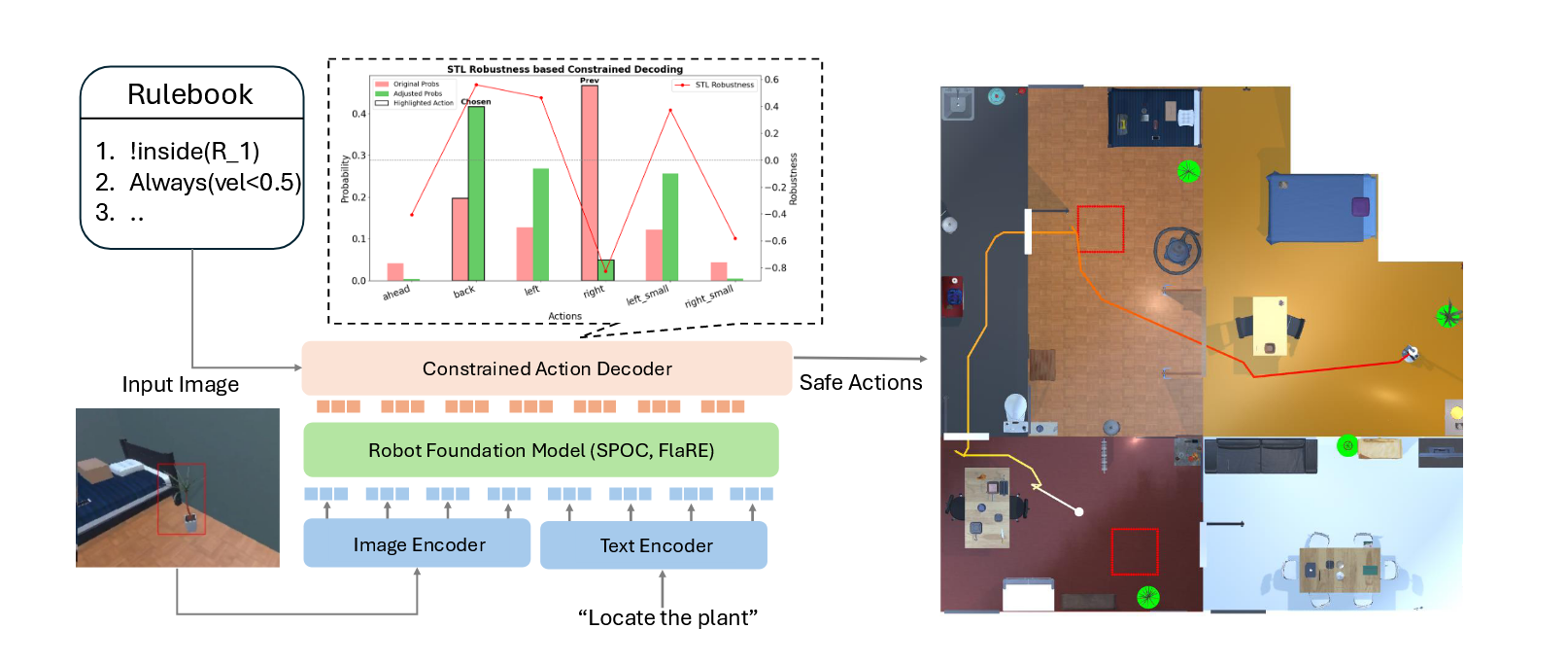
这是文章提出方法的pipeline。给定多模态输入,预训练的机器人模型(Robot Foundation Model, RFM)生成action,这些action基于时序逻辑的约束解码进行调整。
2.1 硬约束解码(Hard Constrained Decoding,HCD)
之前提到过,网络的输出层通过embeddings转换成logits,这些logits之后又通过softmax转换成概率分布。在一些NLP的工作中,往往会剔除掉invalid的输出,这种剔除通常是把他们的logits value设置为\(-\infin\)来实现的。在HCD中我们使用一种类似的方法作为constrained decoding literature。
下面我们介绍一下如何使用数学语言完成HCD:
给定在\(t+k\)时间步的logits向量 \(\mathbf{z}_{t+k}\),对于每个动作对应的 \(z_{t+k}^{(i)}\)
2.2 鲁棒值约束解码(Robustness Constrained Decoding, RCD)
经过实验,hard-filtering的HCD会导致较低的任务成功率。为了解决这种问题,文章提出RCD,使用STL Robustness衡量任务的完成程度。RCD 通过结合反映\(\varphi\)满意度的robustness,软性地引导模型采取更符合任务规范的行动。
robustness value通过实值函数\(\rho(x_t,\varphi)\)来衡量,如果是正值就代表符合规范,否则则代表违反。
首先针对每个候选动作,计算其发挥作用后的robustness score: \(r^{(i)}_{t+k}=\rho(\hat{x}_{t+k}^{(i)},\varphi)\), 该值衡量了每个候选动作满足任务规范的程度。
这个值接下来经过一层指数缩放(exponential scaling): \(w_{t+k,i}=\exp(\alpha\cdot r_{r+k,i})\),这里\(\alpha\)是一个temprature parameter,得到一系列动作权重(action weights)。
使用这些动作权重来修正初始的logits:\(\tilde{z}_{t+k,i}=z_{t+k,i}+\beta\cdot w_{t+k,i}\),其中\(\beta\)就是一个超参数。最后,把修正logits再过一次softmax: \(p_{t+k}=\text{softmax}(\mathbf{\tilde{z}}_{t+k})\)
3.实验
这边介绍一下实验的各项工具:
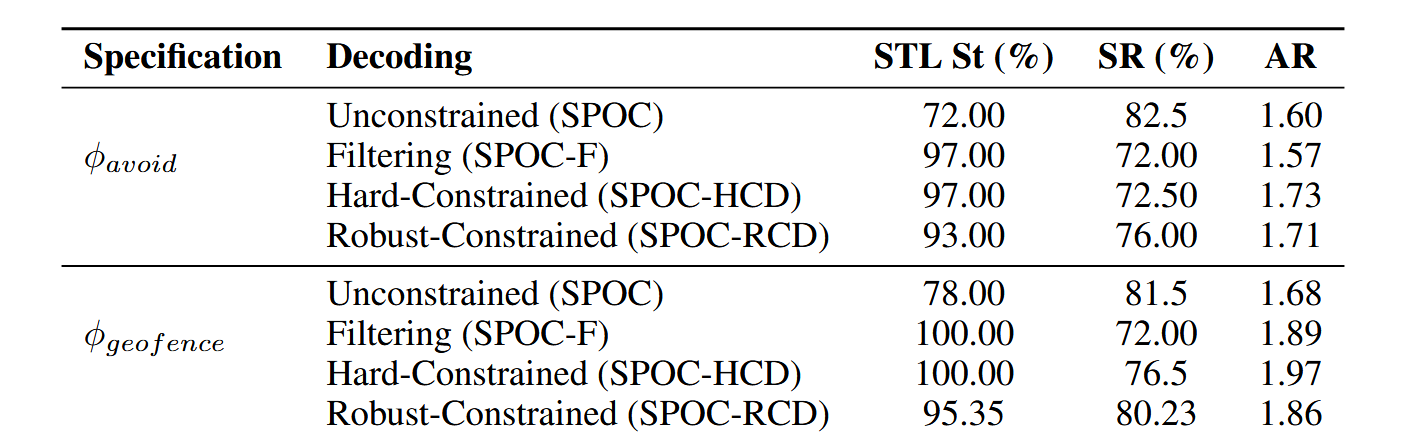
有三个主要的性能指标metrics:
- STL Satisfaction Rate (STL St)
- Task Success rate (SR)
- Average Robustness Score (AR)
带着下面的问题进行实验:
- RCD和HCD的表现是否超过了(outperform)没有约束的model
- RCD 和 HCD 是否会导致与无约束技术相当的任务成功率
- RCD 在任务成功率方面是否比 HCD 表现更好?
最终实验的结果如下:
但是文章还是存在一些问题的,首先假设可以访问状态空间上定义的规范,这种规范从哪来?希望可以通过大语言模型生成(我们希望通过利用开放世界安全规范来解决这一瓶颈,利用最近在嵌入基于空间的逻辑(ETL)方面的工作[32],并使用大型语言模型自动生成高级规范[33])其次希望能够学习底层的世界模型

 浙公网安备 33010602011771号
浙公网安备 33010602011771号