Webots学习笔记(一) 基本概念
最近准备学习webots,看了一下网络上没有什么特别好的教程,估计只能跟着官方的手册Webots User Guide和Webots Reference Manual来进行学习了。
Webots仿真的基本要素
world files
world files(以.wbt作为文件后缀名的)能够决定运行物理环境的各种特性,包括位置,角度,形状,外观(position,orientation,geometry,appearance)。
在webots中,世界由一些对象有序地分层构成,而这些对象又有可能包含着其他的对象
control programs
顾名思义,control programs代表能够控制各个组件的程序。每个组件都有自己的控制程序。
这些控制程序有C,C++等需要编译的语言编写
也有python MATLAB等解释性语言。
physics plugin
一个可选的物理学插件,可用于修改Webots的常规物理学行为
用户界面
用户界面主要包括4各主要界面:
- 3D window
- scene tree
- Text editor
- console
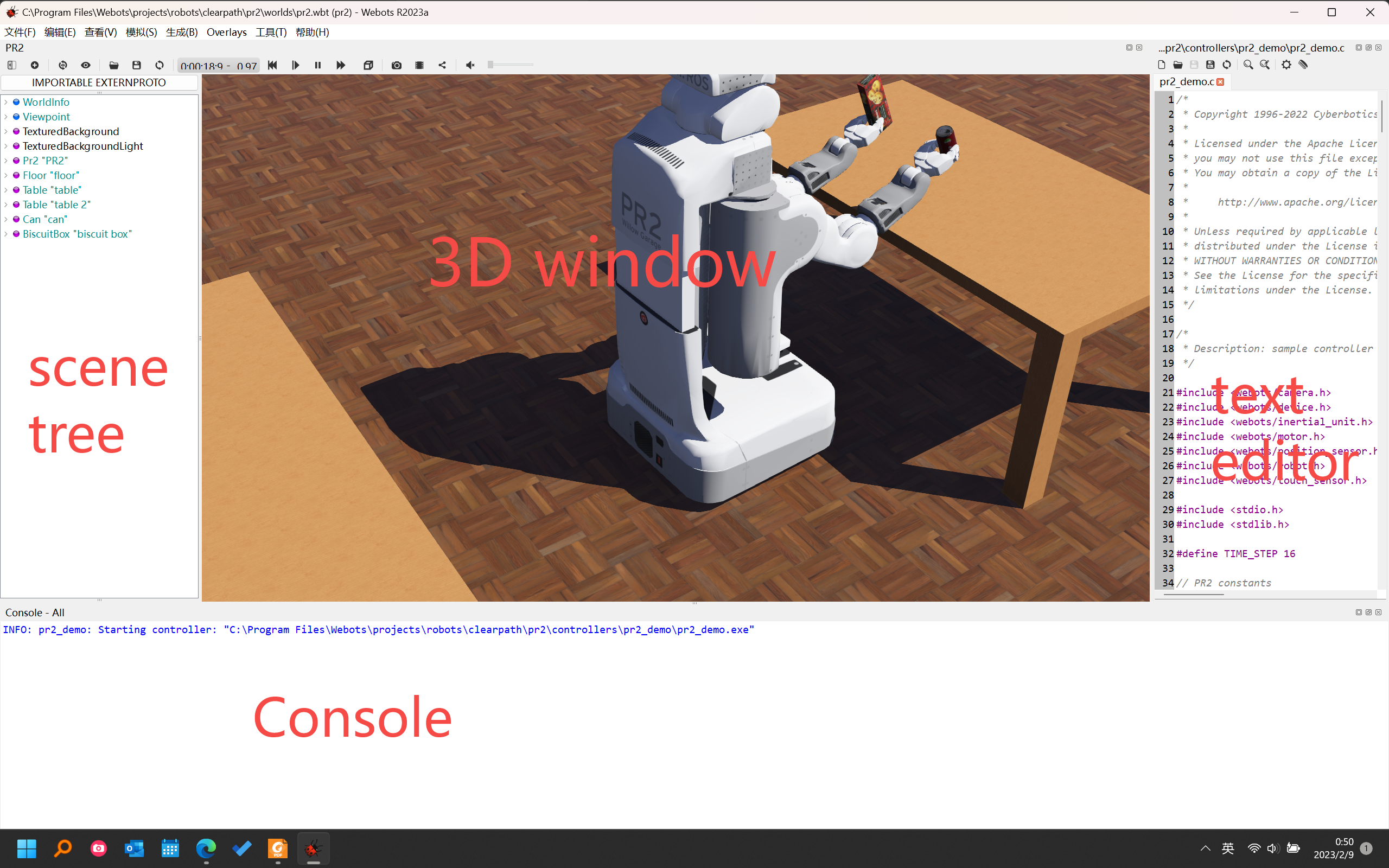
下面对各个主要部分的使用进行介绍。
3D window
这里是模型运行的区域,我们能够看到建立的仿真模型在设定的环境中运行的情况。
主要可能用到的功能有:
视角操作
- 按住鼠标左键旋转视角
- 按住鼠标右键平移视角
- 滚轮调整前后视野
单击选中
单机能够选中机器人,此时机器人外部显示白色线条,出现坐标系,与外部有碰撞除显示粉色
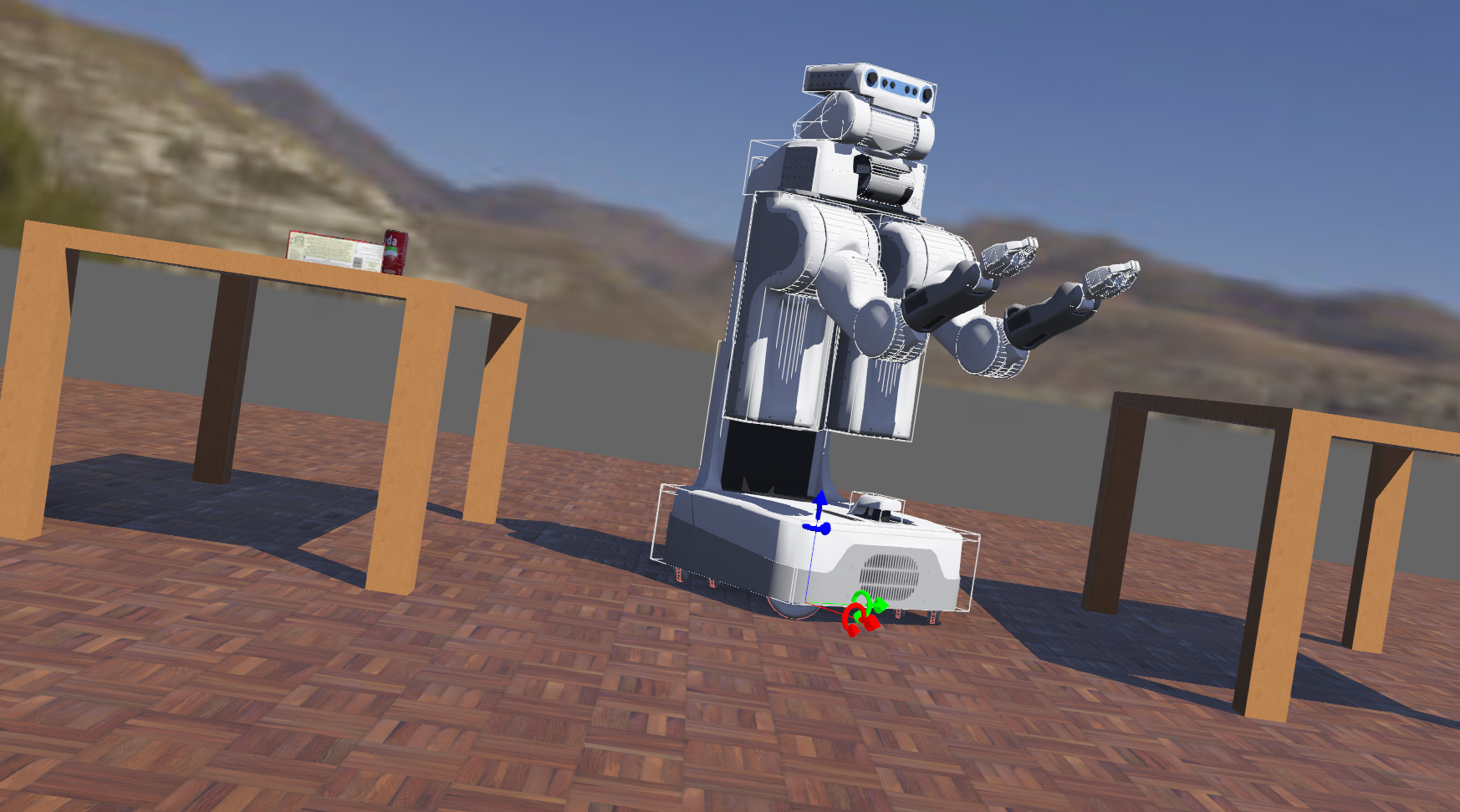
平移机器人
法一:按住单击物体后出现的坐标系上的箭头,即可拖动
法二:选中机器人的同时按下shift键,可在水平面对机器人进行拖拽
旋转机器人
法一:按住单击物体后坐标系上出现的旋转符号,即可让物体在该轴进行旋转
对物体施力或扭矩
按中alt键,长按鼠标左键对选中物体施力,长按鼠标右键对选中物体施力矩
scene tree
作用是显示仿真环境与其中的机器人
由一系列节点(Nodes)组成,节点可以理解为能够代表一些对象。这些对象又各自可能包含节点。
节点中有很多代表属性的值,如名字、尺寸等。
console
这里给我的感觉像终端。console能够输出webots给出的日志信息,也会把运行过程中的warning打印出来。
主要可能用到的功能有:
新建console
工具(英文界面显示为tools)-> New console
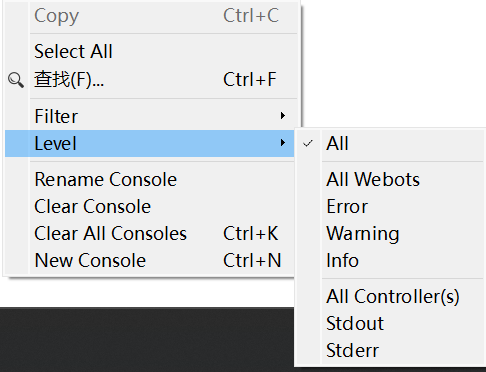
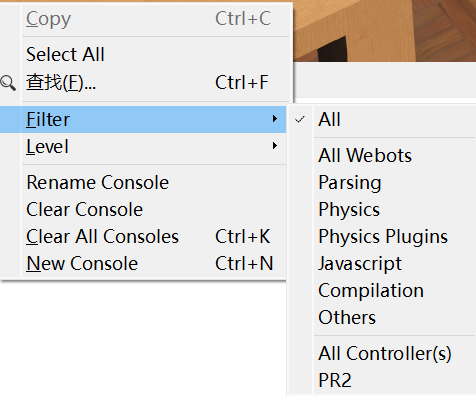
过滤信息
在console区单击右键,在filter和level两个子菜单中可以选择不同的过滤种类

 浙公网安备 33010602011771号
浙公网安备 33010602011771号