
【Claude vs GPT-5】人形机器人控制系统主程序主循环流程图 - 详解
Claude
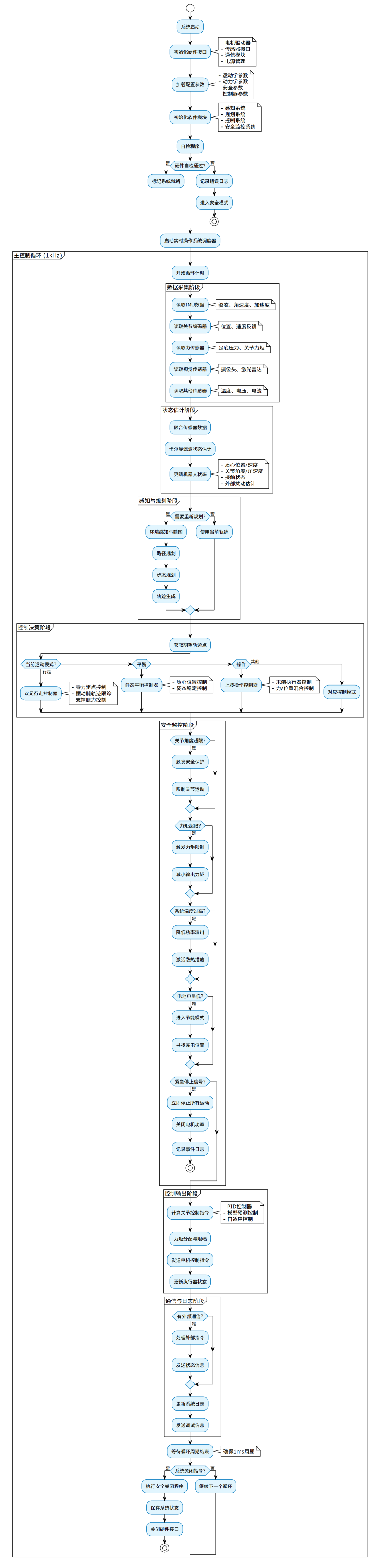
该流程图包含了以下关键特性:
主导组成部分:
1. 系统初始化阶段:
硬件接口初始化(电机、传感器、通信等)
配置参数加载
软件模块初始化
系统自检程序
2. 主控制循环(1kHz频率):
- 数据采集阶段
:读取各种传感器数据
- 状态估计阶段
:数据融合和状态估计
- 感知与规划阶段
:环境感知、路径规划、步态规划
- 控制决策阶段
:根据不同模式选择相应控制器
- 安全监控阶段
:多层次安全检查和保护
- 控制输出阶段
:计算和发送控制指令
- 通信与日志阶段
:外部通信和数据记录
关键设计特点:
- 实时性保证
:1ms控制周期,确保实时响应
- 模块化设计
:不同功能模块清晰分离
- 多层安全保护
:关节限位、力矩限制、温度保护等
- 多种运动模式
:行走、平衡、操作等不同控制模式
- 故障处理机制
:完善的错误检测和恢复机制
这个流程图可以作为人形机器人控制系统构建的架构参考,涵盖了从系统启动到运行控制的完整流程。
ChatGPT
我会假设这是一个高阶、多模块的系统,涵盖传感器融合、运动规划、动力学控制、人机交互、安全监控等模块,并体现机器人主循环的层次结构。
下面的流程图逻辑会分为两大部分:
- 系统启动与初始化(主程序)
- 实时控制循环(主循环)
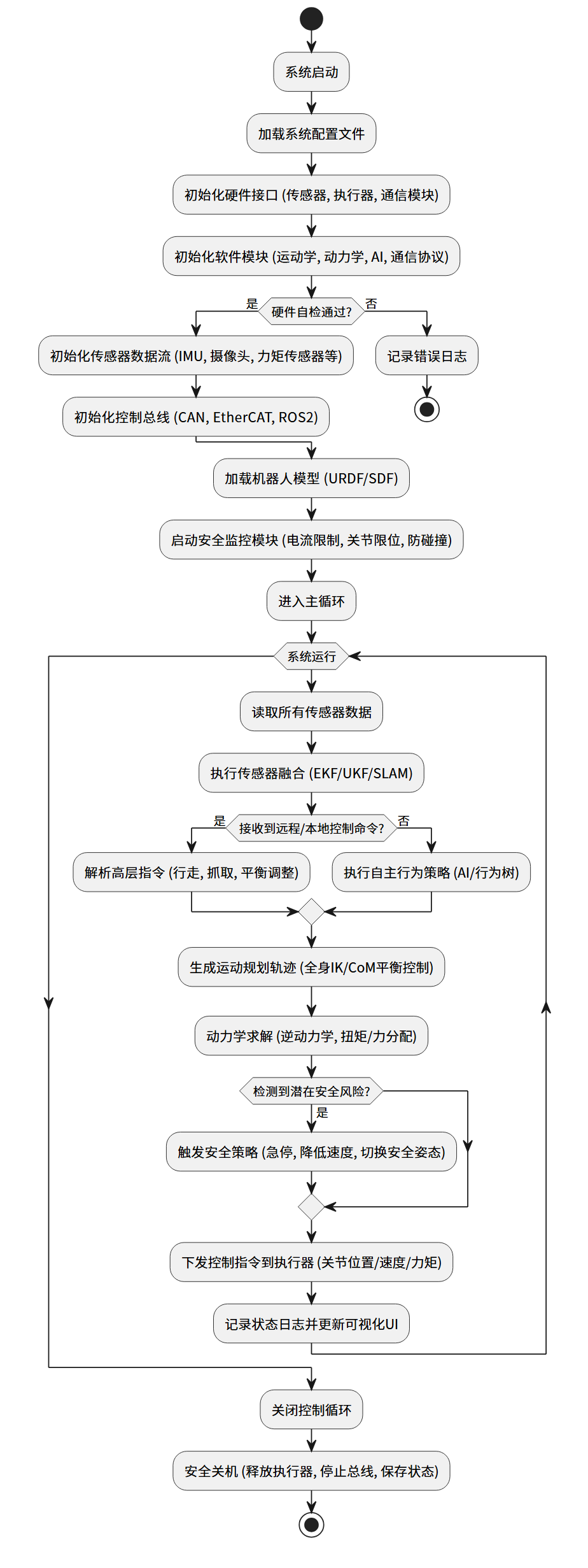
逻辑说明
主程序部分
- 初始化
:先加载设置 → 初始化硬件(传感器、执行器、通讯)→ 软件模块(运动学、动力学、AI)
- 安全监控
:主循环前就启动安全检测,防止在执行过程中硬件损坏
主循环部分
- 传感器资料采集
:包括 IMU、视觉、力矩传感器等
- 数据融合与定位
:用 EKF/UKF/SLAM 来得到稳定的机器人状态
- 指令解析
自主 AI 行为决策就是:可以是远程遥控,也可以
- 运动规划与控制
:全身逆运动学(IK)+ 平衡控制 + 逆动力学求解
- 安全检查
:循环中持续检测紧急情况(跌倒、碰撞、电机过流等)
- 执行器驱动
:将计算结果下发到关节驱动器
- 数据记录与UI更新
:方便调试和远程监控
- 传感器资料采集
停止与关机
停止控制循环
释放执行器、保存数据、断开通讯
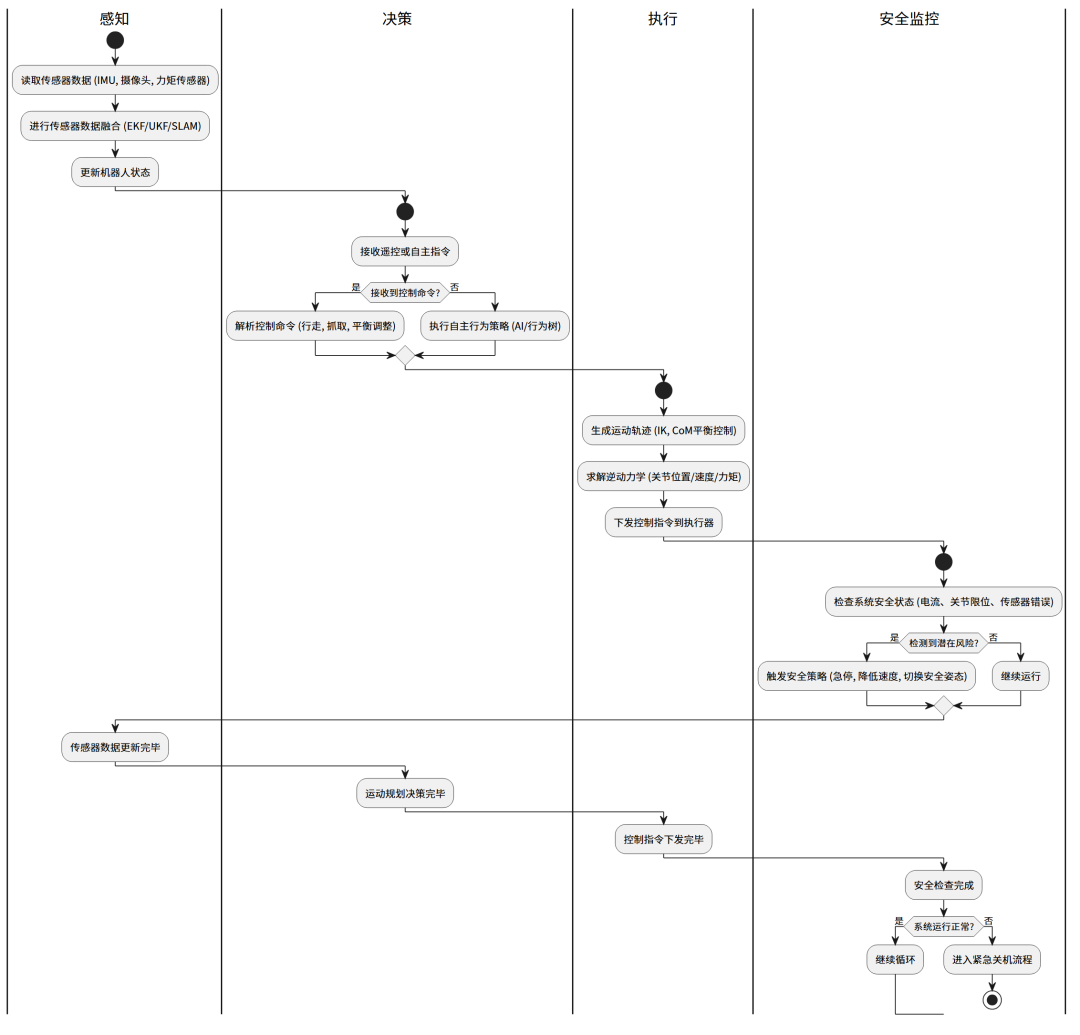
并行运行的。就是在该版本中,每个泳道将表示一个独立的子系统,它们在主循环中
![]()
逻辑说明
感知泳道:
主要负责数据采集和数据融合。
包括传感器读取、数据融合(如EKF/UKF/SLAM)和机器人状态更新。
决策泳道:
主要负责解析控制指令和生成自主决策。
根据收到的遥控或本地指令,生成运动规划和决策策略。若没有指令,系统会选择自主行为策略(例如基于AI或行为树的决策)。
执行泳道:
负责生成运动轨迹、进行逆动力学求解和将控制指令下发到关节执行器。
执行具体的运动控制操作。
安全监控泳道:
实时监控系统状态,如电流、关节位置、传感器状态等。
如果发现潜在的安全问题(如碰撞、过流等),触发急停或采取相应的安全措施。
并行执行
这些模块是在每个主循环周期中并行执行的。流程图反映了这些子系统的并行性,使得每个子系统能够独立高效地工作,同时共享机器人状态和控制信息。
Copilot
![]()
![]()
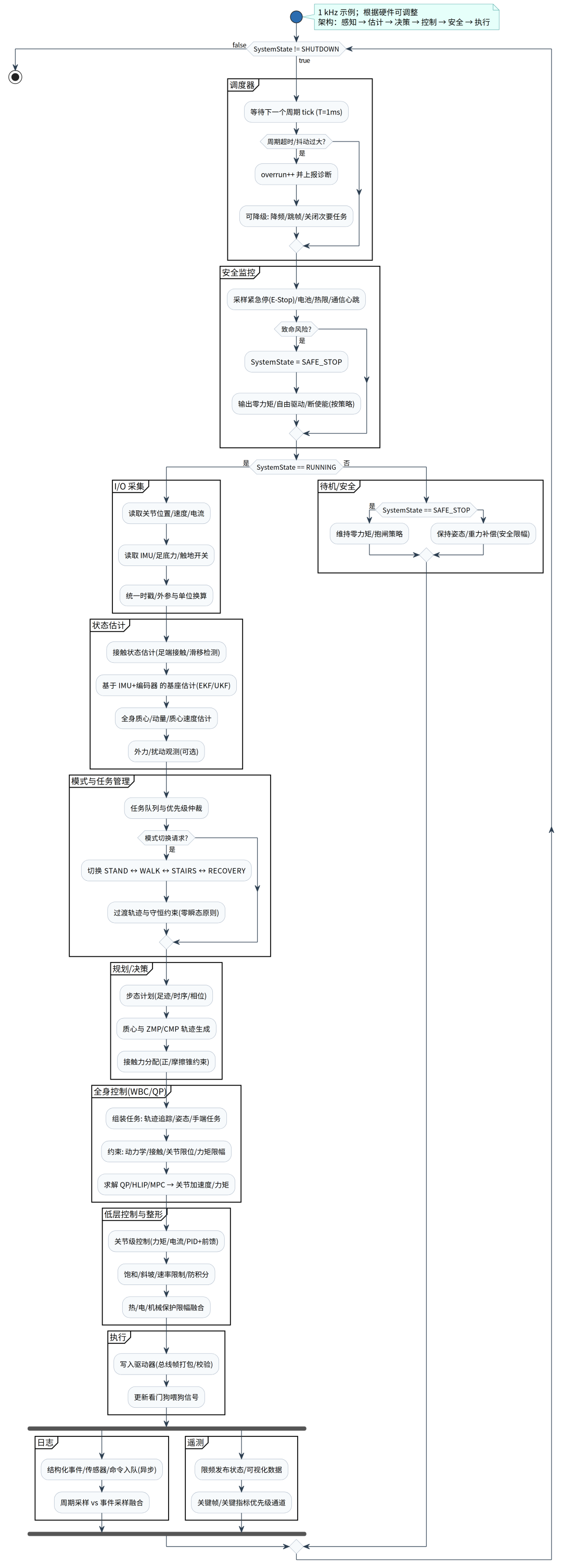
使用与扩展建议(可选)
版本化与差异对比
将 title 中版本号按你的提交历史递增,例如 v0.1.1/v0.2.0,并在变更点附近添加 note 标注“新增/变更/弃用”。
粒度拉通代码
将“状态估计”“WBC/QP”“低层控制”中的每个函数再各出一张子流程图,标题加相同版本号,以完成函数级一一对应。
可插拔任务
在“规划/决策”与“WBC/QP”之间增加“任务装配线”分区,用条件分支控制手端/视觉引导/楼梯等可选任务的注入与降级。
健壮性
给“调度器”与“安全监控”增加“退化级别”枚举,配套日志打点,便于线下复盘延迟-降级曲线。
如果你愿意,我可能继续为某一个分区(比如“WBC/QP”或“状态估计”)出函数级、符号级的子图,与你的代码逐函数对齐,保持版本化可追溯。你最想先拆哪一块?


 浙公网安备 33010602011771号
浙公网安备 33010602011771号