聊聊无人驾驶汽车的发展历史(三)——DARPA无人驾驶挑战赛
20世纪无人驾驶技术取得了很大的成就,从早期的无线电遥控到无线电导引,再到为车辆装配传感器、计算系统和控制系统等,赋予车辆“视觉”、智能和自动化的能力,使车辆能够在结构化的道路上实现自动驾驶,无人驾驶技术的发展方向也从最初的公路智能化转到了车辆智能化上来。但是到本世纪末,无人驾驶技术的研究还只是集中在大学实验室或汽车公司的研究院中,并未能形成一个真正的产业。进入21世纪,事情开始起了变化,而这一切都得益于美国国防部高级研究计划局,以下简称“DARPA”举办的一个无人驾驶车挑战赛——DARPA Grand Challenge。正是因为这个比赛,吸引了以Google为代表的全世界ICT公司和硅谷创业公司加入到智能汽车的研发中来,由此也引起了传统汽车产业“智能化”的变革,诞生了一个上万亿的产业。
DARPA大挑战赛
DARPA组织这个挑战赛时并没有想到会产生如此大的影响,他们当时只是想通过公开比赛的方法找到为军方打造马上可投入批量生产的智能车的技术,以及激励众多工程设计高手对智能车开发过程中遇到的一些列难题进行攻关研究。而这一切,都要从一场战争说起。
2001年,美国深陷阿富汗战争,为了应对路边炸弹引起的大量伤亡,美国国会通过了一项法案:在2015年,军方三分之一车辆必须进行无人驾驶。直到2002年,由军方资助的无人车项目已经进行了十多年,却只造出又笨又慢的样车,令人大失所望。2003年,伊拉克战争爆发,无人驾驶技术还没有大的进展。根据法案,国会命令DARPA负责推动相关技术的发展,授权该局对无人驾驶汽车的研发人员进行现金奖励。有了奖金的支持,DARPA决定另辟蹊径,举办一项奖金为100万美元的公开竞赛,吸引更多的团队投入智能车研究。从2004到2007年,DARPA共赞助了三场公路赛事,分别是2004年和2005年DARPA大挑战赛和2007年的DARPA城市挑战赛。
1)2004年DARPA大挑战赛
第一届DARPA挑战赛于2014年3月在美国莫哈维沙漠地区举行, DARPA聘请了专业的卡车沙漠赛策划公司设计比赛路线,路线总长240公里,比赛路线文件 (包括道路边界的经纬度、宽度,以及相应速度限制等)在赛前两小时分发给每个车队,这样可以避免车队提前准备,也增加了比赛的神秘感。车辆比赛途中不但会遇到急弯、隧道、下坡、路口、沟壑和遍布全程的仙人掌,还要识别可能突然出现的动物和火车等。比赛要求参赛车辆必须是无人驾驶的自主地面车辆,不允许远程遥控,并对每辆赛车进行实车跟踪,在10小时内最先到达终点的队伍获胜,对于无人车来说这真的是一个大挑战。第一届比赛一共收到了 106 个队伍的参赛报名表,在预选赛时有 25 个车队通过了安全和技术测试,然后在加利福尼亚的高速公路上进行了一英里长的自主导航与障碍测试的资格赛,有15支车队进入了决赛,这些车辆中有传统造型的 SUV,也有沙漠越野车和怪兽卡车,甚至还有一辆摩托车。下图为部分参赛车辆,从左上方顺时针旋转:Axion Racing的吉普大切诺基;卡内基·梅隆(Carnegie Mellon)Red team的悍马改装车“Sandstorm” ,TerraMax团队的Oshkosh军用卡车;以及Palos Verdes高中团队的Ac歌SUV“ Doom Buggy”。

由于车载软硬件系统过于粗糙。硬件传感器和GPS系统速度慢不说,而且极其不稳定,它们可能会无意间让车辆急刹车或跑偏。机器的软件表现就更糟了,致使车子在路堤和岩石上停滞不前。比赛过程中,参赛车辆由于各种机器问题纷纷推出比赛,比赛进行了几个小时以后,所有车队中卡内基梅隆大学Red Team的赛车Sandstorm(改装的悍马车)行驶了最远的距离,完成了11.78公里的路程,不到全程的5%,接着在一个急转弯后装上岩石结束了比赛。最终,15支参赛团队都没能顺利完成眼前的任务,这一届比赛的100万美元的现金大奖没有送出去。
虽然第一次挑战赛以惨败告终,但因为这场比赛科学家、学生、发明家、赛车手、机械家和梦想家凑到了一起解决棘手的问题,他们给大赛带来的创意引发了新一轮关于无人驾驶汽车的研究,从这个角度来说,这次比赛无疑是成功的。
2)2005年DARPA挑战赛
第二届DARPA挑战赛与2005年10月8日举行。赛前共有195支队伍报名,其中43支车队通过审核进入了资格赛。资格赛按所用时间、通过项目数、绕障碍物表现、以及比赛完成度4个方面进行排名,23支队伍进入了决赛。这一届比赛最高奖的金额提升到了200万美元。
比赛场地仍然在莫哈维沙漠,规则与2004年大致相同:参赛车辆在不借助公路设施和外力帮助的情况下,自动驾驶通过212公里的赛道。组委会在比赛前两个小时发放比赛路线文件,其中包括平均每间隔72米一个的GPS点,根据路况复杂程度会调整GPS点的密集程度。第二届DARPA挑战赛的越野环境道路相比于上届更加恶劣,道路更陡、更窄、曲线赛道的数量更多,其中包含3条狭窄隧道,100多个急转弯,还有很多陡坡、山路等复杂的路况,其中最困难的一段被称为啤酒瓶走廊,如下图所示,稍有不慎,车辆将会翻到山谷里。

2005年DARPA挑战赛是移动机器人发展史上的临界点,史上第一次,五辆无人驾驶汽车使用人工识别系统,成功通过了路况恶劣的沙漠赛道。它们分别是:

斯坦福团队的Stanley以不到7小时的成绩获得冠军,获得了200万美元大奖。斯坦福团队由斯坦福大学人工智能实验室主任Sebastian Thrun(塞巴斯蒂安·特伦)领衔,团队成员来自斯坦福大学人工智能实验室、美国大众电气研究实验室、英特尔研究中心和Mohr Davidow风险投资公司等。下图为Sebastian Thrun和Stanley合影照。

斯坦福团队被分成四大组:硬件组、软件组、测试组和公关组。硬件组由美国大众汽车电子研究实验室的研究人员领导,主要负责监督与车辆相关的所有改装和部件开发,包括线控驱动系统、传感器和计算机安装以及计算机系统。软件组和测试小组由斯坦福大学的研究人员领导,软件组开发了包括导航软件和各种健康监测和安全系统等所有软件。测试小组负责根据指定的测试时间表测试所有系统组件和整个系统,测试小组的成员与其他任何小组分开。宣传小组由莫尔·戴维多风险投资公司的员工领导,所有其他赞助商都参与其中,主要负责管理斯坦福赛车队的所有媒体关系和筹款活动。整个团队的运营监督由一个包括所有主要支持者的指导委员会负责。
Stanley是基于一辆大众途锐越野车改造而成。配置的传感器有:5个Sick单线激光雷达,负责车辆前方25米范围内近距离路面探测;一个彩色摄像头,用于35米范围中远程道路感知;两个Smart Microwave Sensors公司的24GHZ毫米波雷达,覆盖车辆前方200米区域。激光雷达、摄像头和毫米波雷达系统构成了Stanely的环境感知传感器组合。GPS信号接收器和一个惯性测量单元(IMU),一起构成Stanley的定位传感器组,用来估计车辆相对于外部坐标系的位置和速度。Stanley的计算和网络系统位于汽车的后备箱中,由6台奔腾M电脑组成计算阵列,一个千兆位以太网交换机以及各种与物理传感器和Touareg执行器接口的设备构成;Stanley还配备了带备用电池的定制电源系统和冷却系统。Stnaley现收藏于美国国家博物馆,下图为博物馆制作的展示Stanley构造的资料。

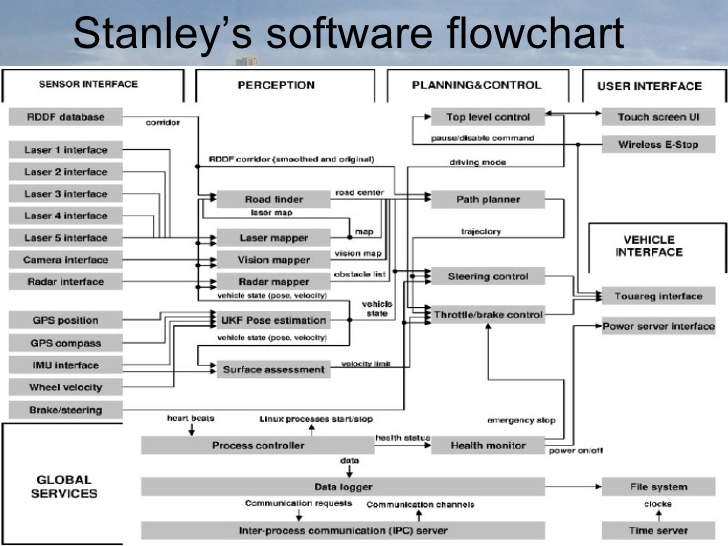
Stanley的软件系统大约由30个并行执行的模块组成,如图5所示。系统分为六层,分别对应以下功能:传感器接口、感知、控制、车辆接口、用户界面和全局服务。
- 传感器接口层包括多个软件模块,这些软件模块负责所有传感器数据的接收和时间同步;
- 感知层将传感器数据映射到内部模型中。利用无迹卡尔曼滤波器(UKF)对车辆状态进行估计,确定车辆的坐标、方向和速度;三个不同的映射模块基于激光雷达、相机和毫米波雷达系统构建二维(2D)环境地图;寻路模块使用激光雷达导出的地图来寻找道路的边界,以便车辆能够横向居中;路面评估模块提取当前道路的参数,以确定安全车速;
- 控制层负责调节车辆的转向、油门和制动响应。路径规划器设置车辆在转向和速度空间的轨迹,该轨迹被传递给两个闭环轨迹跟踪控制器,一个用于转向控制,另一个用于制动和油门控制。两个控制器都向执行器发送低级命令,执行器忠实地执行规划器发出的轨迹。控制层还具有一个顶层控制模块,作为一个简单的有限状态自动机实现。该层根据通过车内触摸屏或无线急停(E-Stop)接收到的用户命令确定一般车辆模式,并在需要向后运动时保持档位状态;
- 车辆接口层作为机器人线控系统的接口。它包含与车辆制动、油门和方向盘的所有接口。它还具有与车辆服务器的接口,这是一种调节许多系统部件物理功率的电路;
- 用户界面层包括远程急停(E-Stop)和用于启动软件的触摸屏模块;
- 全局服务层为所有软件模块提供命名和通信、车辆参数、电源、系统运行状况监控、时钟同步和数据记录等许多基本服务;
关于Stanley的详细信息请参考斯坦福团队发表的一篇文章“Stanley: The Robot That Won the DARPA Grand Challenge”,文章对Stanley进行了详细的介绍,链接地址为:https://onlinelibrary.wiley.com/doi/pdf/10.1002/rob.20147,此外Sebastian Thrun在Google TechTalks也有一个题为“Winning The DARPA Grand Challenge”的分享视频,链接为https://v.youku.com/v_show/id_XMTY4MTY3NTAyMA==.html,可以参考。
如果你想了解更多2005年DARPA挑战赛的盛况,可以参考视频“DARPA Grand Challenge 2005”,该视频记录了整个比赛的过程,链接为https://v.youku.com/v_show/id_XMzk5MTkxNzA3Ng==.html。
虽然2005年DARPA大挑战赛是自动驾驶汽车探索的一个里程碑,但它也留下了一些重要的问题。其中最重要的是,比赛环境是静态的,Stanley无法在交通环境中导航。自动驾驶要想成功,像Stanley这样的机器人必须能够感知移动的交通,并与之互动。于是,DARPA决定组织新的挑战。
3)2007年DARPA 城市挑战赛
第三届挑战赛被称为“城市挑战赛”(Urban Challenge),于2007年11月3日在美国西部加利福尼亚州维克多维尔的乔治空军基地(现已关闭)举办,前三名的奖金分别为200万、100万和50万美元。此次比赛在全长96公里的城市道路举行,需在6小时之内完成,并且需要遵守所有的交通规则,同时与其他交通工具和障碍物进行协同和交互,比赛制定了严格的规则,如下:
- 参赛车辆必须备有或有记录在案的安全记录;
- 参赛车辆必须遵守加利福尼亚州的驾驶法规;
- 参赛车辆必须是完全自主的,仅使用通过传感器和GPS等公共信号检测到的信息;
- DARPA将在比赛开始前24小时提供路线网络;
- 参赛车辆将通过在指定的检查点之间行驶来完成路线;
- DARPA将提供一个文件,详细说明检查点必须在比赛开始前5分钟到达的顺序;
- 参赛车辆最多可以“停车凝视”10秒;
- 参赛车辆必须在有雨有雾的情况下行驶,GPS系统不能打开;
- 参赛车辆必须避免与车辆和其他物体(例如手推车,自行车,交通桶)和环境中的物体(例如电线杆)发生碰撞;
- 参赛车辆必须能够在停车区内行驶,并根据情况要求掉头。
虽然2004年和2005年的赛事对车辆来说更具挑战性,但机器人是孤立地运行的,并且只在试图超车时会在赛道上遇到其他车辆。2007“城市挑战”要求设计者设计出能够遵守所有交通规则的车辆,同时能够在赛道上检测和避开其他机器人。这对于车辆软件来说是一个特殊的挑战,因为车辆必须基于其他车辆的动作实时做出“智能”决策。与之前专注于高速公路驾驶等结构化情况的自动驾驶汽车不同,这次比赛在更杂乱的城市环境中进行,并且要求汽车之间进行复杂的互动,这更像人类的驾驶场景,这无疑增加了挑战的难度。最终,53支报名队伍中,11支通过了资格测试,6支车队跑完了全程,卡内基梅隆大学的Boss、斯坦福大学的Junior和弗吉尼亚理工大学的Odin获得前三名,麻省理工学院获得第4名,宾夕法尼亚大学和康奈尔大学也完成了比赛,这6支队伍的成绩信息如下表所示。
 Boss是以汽车行业的杰出人物Charles “Boss” Kettering的名字命名的,他的发明范围广泛,如汽车的全电动起动机、冷却液氟利昂和早产儿保育箱。Boss是由Tartan Racing团队开发的,该团队负责人为卡耐基梅隆大学(CMU)的机器人专家和机器人研究所教授Red Whittaker,他也曾是前两届Darpa挑战赛CMU团队的负责人;团队的技术负责人为Chris Urmson,他参加了2005年的Darpa挑战赛,团队其他成员来自通用汽车(General Motors)、卡特彼勒(Caterpillar)、大陆(Continental)和英特尔(Intel),下图为Tartan Racing团队成员合影,巨型鹰雕像正后方为Red Whittaker,在他右侧的是Chris Urmson。
Boss是以汽车行业的杰出人物Charles “Boss” Kettering的名字命名的,他的发明范围广泛,如汽车的全电动起动机、冷却液氟利昂和早产儿保育箱。Boss是由Tartan Racing团队开发的,该团队负责人为卡耐基梅隆大学(CMU)的机器人专家和机器人研究所教授Red Whittaker,他也曾是前两届Darpa挑战赛CMU团队的负责人;团队的技术负责人为Chris Urmson,他参加了2005年的Darpa挑战赛,团队其他成员来自通用汽车(General Motors)、卡特彼勒(Caterpillar)、大陆(Continental)和英特尔(Intel),下图为Tartan Racing团队成员合影,巨型鹰雕像正后方为Red Whittaker,在他右侧的是Chris Urmson。
 Boss基于一辆2007年的雪佛兰Tahoe改装,集成了一种商用的线控驱动系统,通过计算机控制,借助电动马达实现自动转向、刹车和换挡。同时Boss保留了正常的人类驾驶控制机构(方向盘、刹车和油门踏板),以便安全员在测试期间能够快速、轻松的控制车辆。为了实现高速计算,Boss使用具有10个2.16-GHz Core2Duo处理器的Compact PCI机箱,每个处理器具有2 GB的内存和一对千兆位以太网端口。每台计算机均从4 GB闪存驱动器启动,从而减少了磁盘故障的可能性。Boss使用传感器组合来提供在城市环境中安全导航所需的冗余和覆盖范围。Boss周身配备了十几个传感器,包括激光雷达、摄像头和雷达,所有这些传感数据将用于无人车实现感知、规划和决策。Boss的外观见下图。
Boss基于一辆2007年的雪佛兰Tahoe改装,集成了一种商用的线控驱动系统,通过计算机控制,借助电动马达实现自动转向、刹车和换挡。同时Boss保留了正常的人类驾驶控制机构(方向盘、刹车和油门踏板),以便安全员在测试期间能够快速、轻松的控制车辆。为了实现高速计算,Boss使用具有10个2.16-GHz Core2Duo处理器的Compact PCI机箱,每个处理器具有2 GB的内存和一对千兆位以太网端口。每台计算机均从4 GB闪存驱动器启动,从而减少了磁盘故障的可能性。Boss使用传感器组合来提供在城市环境中安全导航所需的冗余和覆盖范围。Boss周身配备了十几个传感器,包括激光雷达、摄像头和雷达,所有这些传感数据将用于无人车实现感知、规划和决策。Boss的外观见下图。

Boss的软件系统有50万行代码,采用分布式架构,主要由感知子系统、运动规划子系统、路径规划、行为规划系统组成,各系统主要功能如下:
- 感知子系统处理并融合来自Boss多个传感器的数据,从而为系统的其余部分提供环境的综合模型。该模型包括三个主要部分:静态障碍物地图,环境中正在行驶的车辆的列表,以及Boss相对于道路的位置;
- 运动规划子系统由两个规划器组成,每个规划器都能够在实现预期目标的同时避开静态和动态障碍物。主要考虑两种情况:结构化驾驶(道路跟踪)和非结构化驾驶(停车场机动);
- 路径规划器根据公路网知识计算到下一个任务检查站的所有可能路线的成本。路径规划器对通往特定检查站的最佳路径进行推理,根据道路堵塞的知识、最高法定限速和一次机动所需的名义时间来比较路线;
- 行为规划系统根据路径规划器提供的战略信息为运动规划器制定要解决的问题定义。行为规划子系统做出战术决策以执行路径规划,并在出现问题时处理错误恢复。行为规划系统大致分为三个子组件:车道驾驶、十字路口处理和目标选择。
上述四大系借助千兆以太网实现多进程间通信,运动规划子系统每秒可估计出1000多个候选路径轨迹,感知子系统通过多传感器信息融合生成动、静态障碍物模型,行为规划系统通过上下文推理提供路径规划决策策略。在上述硬件和软件的支持下,Boss能实现以下功能:
- 行驶遵守交通规则;
- 在长距离上探测和追踪其他车辆;
- 在停车场寻找车位并停车入位;
- 在路口遵守优先通过规则;
- 与前车保持安全距离;
- 对路面动态做出反应:例如路面封闭或者有车抛锚。
关于Boss的更多信息,可以参考Tartan Racing 团队的一篇文章“Autonomous Driving in Urban Environments: Boss and the Urban Challenge”,文章对Boss进行了详细的介绍,链接地址:https://onlinelibrary.wiley.com/doi/pdf/10.1002/rob.20255。还有一个关于Boss赢得城市挑战赛的视频,链接为:https://v.qq.com/x/page/x0561c18moe.html?。
如果你想了解城市挑战赛的盛况,可以参考视频"DARPA Urban Challenge 2007 driverless car competition",链接地址:https://v.youku.com/v_show/id_XNDI5OTM5NjA4MA==.html。
2007年城市挑战赛之后,DARPA未再组织新的智能车挑战赛。但是通过这三次挑战赛,DARPA已经成功发掘了无人车研究者的潜力,也孵化了无人车的基础路线—即由摄像头、激光雷达、毫米波雷达传感器,线控系统、计算单元等构成无人车硬件系统,由传感器融合、目标定位、识别、路径规划和行为规划等算法构成无人车的软件系统,软件和硬件结合构成自动驾驶系统。而后人所做的,无非是在这条基础路线上进行更加深入和精细化的技术迭代。
DARPA发起的系列挑战赛,促生了一个由发明家、工程师、程序员、开发商等组成的无人驾驶生态圈,这一面“孵化”了一系列无人驾驶团队,而这些团队成员,已经成为目前无人驾驶大潮中的主力军,另一方面也促成了无人车技术创业和投资热潮的兴起。谷歌、特斯拉、优步、百度等陆续宣布研发无人车的计划,毫不掩饰自己在无人车的野心,同时,一大批无人驾驶创业公司如Velodyne lidar、Aurora等如雨后春笋般创立了。在互联网企业的灼热展望中,就连保守的传统汽车制造商和背后的供应链也“被迫”加入了“无人车军备赛”,因为这已事关生死存亡。
而这一切,都开始于2004年那场DARPA挑战赛,技术的发动机一经启动,就没有人能让它停下。
DARPA挑战赛之外的一些事情
1)斯坦福大学和卡耐基梅隆大学之争
斯坦福大学和卡内基梅隆大学(CMU)队之间的竞争是超级挑战赛中最具看点的。CMU的Red Team是所受呼声最高的团队。2004年,团队成功改装两辆悍马——H1ghlander和Sandstorm,搭载自动驾驶技术,在沙漠中顺利驰骋数周,一举取得当年的DARPA超级挑战赛最好成绩。然而,在2005年,Red Team并没有让所望所归,引擎问题从比赛开始两个小时后一直困扰着H1ghlander,车辆一直无法达到设计的目标速度。而这个引擎谜题直到2017年才被意外解开:是安装在引擎控制模块和燃油注射器之间的过滤器出现了问题。
斯坦福大学队和CMU也有千丝万缕的联系,斯坦福大学队队长Sebastian Thrun以前是Carnegie Mellon的教员和CMU团队负责人Red Whittaker的同事。斯坦福大学对于2005年夺冠也十分惊讶:我们能赢纯属偶然,如果卡内基梅隆的引擎不出意外,那我们应该就输了。毕竟H1ghlander被引擎问题耽误了40多分钟,而最终Stanley仅仅以11分钟的优势赢得了挑战赛。
斯坦福大学团队认为2005年他们能取得成功,有两方面做的比较好:计算机视觉技术(CV)软件debug的时间。 1)推动CV在Stanley应用的是Intel的研究员Adrian Kaehler,他后来撰写了著名的《Learning OpenCV》,正是因为相对于其他队伍,Stanley使用了更多的CV,Stanley才能够在平坦、空旷的路段比其他队伍跑得更快;2)赛后研究发现,每个团队花在沙漠(类似DARPA挑战赛的环境)debug系统的时间,和最终大赛的表现几乎是完美成正比的,即在沙漠花的时间=挑战赛最终成绩,CMU败给斯坦福,是因为他们离比赛的沙漠太远了(CMU坐落在美国东部匹兹堡,比赛在中西部沙漠地区,地处加州靠近比赛场地的斯坦福大学有着巨大的主场优势)。CMU输给斯坦福的一个合理的论点可能是:CMU在比赛环境测试、debug的时间不如斯坦福,而更对的debug时间总是需要的。
2007年城市挑战赛,尽管斯坦福团队在所有队伍中最快通过终点,但最终结果不是基于完成顺序,而是基于官方时间和其他驾驶“技能”的方法来判定,由于斯坦福团队车辆在比赛中被多次暂停,相比较CMU团队更稳定可靠,DARPA最终判定卡内基梅隆大学获得了冠军。
DARPA这场挑战赛,奠定了卡内基梅隆大学和斯坦福大学在自动驾驶领域的地位,两所大学也成为美国无人驾驶行业的黄埔军校。
2)激光雷达公司Velodyne Lidar创立
David Hall(见下图)于1983年在硅谷成立了Velodyne,Velodyne是一家专门从事低音炮技术的音频公司。David Hall参加了2004和2005年的挑战赛,虽然两次都失败了,但David Hall 通过挑战赛认识到了立体视觉和现有单线固定视线激光雷达的局限性,2006年Velodyne公司开始专注研究多线360度旋转激光雷达,并成功开发了 HDL-64 固态混合激光雷达传感器。
在DARPA的劝说下,David Hall量产了这款雷达,并提供给了参加城市挑战赛的团队,在2007年完赛的6支队伍中,有5支队伍使用了Velodyne的雷达。自此 Volydane 在无人驾驶领域的影响力开始建立起来了。2016年,Velodyne的激光雷达部门从Velodyne Acoustics分离为Velodyne Lidar。Velodyne成为DARPA挑战赛孵化的第一个高科技企业,而这也支撑起谷歌疯狂的想法。
3)赛场上的大家伙—Oshkosh TerraMax
Oshkosh是一家来自威斯康星州的卡车和发动机制造商,除了机场和消防机构外,主要为美国陆军提供重型卡车。作为军队的大型合约供应商,DARPA组织的挑战赛对于它们的意义可不一样,对大学而言,只是一点名气,斯坦福将获胜的两百万奖金捐给了该校的计算机系。而对于 Oshkosh,这可能意味着更大的订单,因此必须向客户证明他们的技术实力。
TerraMax团队由Oshkosh公司和帕尔马大学的人工视觉和智能系统实验室(VisLab),Teledyne科技公司,奥本大学,IBEO和Caterpillar组成,Alberto Broggi担任TerraMax车队队长。2005年挑战赛,TerraMax获得了第五名的成绩,尽管超出了比赛要求的时间,但对于TerraMax这样的大块头能取得那样的成绩已经很不错了。因此挑战赛的最大获益者或许可以认为是 Oshkosh,斯坦福赢了两百万,Oshkosh 的获益说不定十倍不止。下图为TerraMax比赛的场景。

4)摩托车选手 — Anthony Levandowski
在DARPA挑战赛上,有一个特别的选手,他的参赛的车辆是一辆两轮摩托车,他就是Anthony Levandowski。2004年的时候,Levandowski还是加州加州大学伯克利分校的学生,他和他的同学们制造了一辆自动驾驶摩托车,绰号为Ghostrider。 Ghostrider摩托车先后参加了2004年和2005年DARPA大挑战赛,并且是比赛中唯一的自动两轮车。Levandowski曾解释过他制造自动化摩托车的原因。“我本来想做一台自动化叉车,但当有一天,在我开车去伯克利的路上,一堆‘光荣的’雅马哈摩托车掉在了我的皮卡上。在周围众人的笑声中我灵光乍现,Ghostrider的想法诞生了。如果它跑起来比四轮车还稳,那这件事儿得多酷啊!”尽管Ghostrider未能在比赛中取得成功,但自动摩托车的想法和Anthony Levandowski团队还是赚足了眼球。如今这辆摩托车被收藏在美国历史博物馆。下图为Levandowski测试Ghostrider的情景。

Levandowski毕业后,先加入了David Hall旗下的公司Velodyne。2007年Levandowski加入Google,研究Google街景。Anthony Levandowski在谷歌的前几年,拉里.佩奇对他的宠溺程度,远超常人想象。在Google工作期间,他私下创立了两家公司作为副业:510 Systems,一家尝试激光雷达技术的移动地图初创公司;Athony's Robots,制造一款名为“ Pribot”的自动驾驶丰田普锐斯,该车最早采用旋转激光雷达,也是有史以来第一辆在公共道路上行驶的车。Levandowski利用这两家公司与Google进行业务往来赚取利益。令人大跌眼镜的是,在Levandowski的光辉事迹暴露后,Levandowski竟然提议Google收购自己创办的这两家私人公司,他的同事们很震惊,同事们一致认为这涉嫌“利益输送”,必须开除Levandowski,但佩奇竟然答应了Levandowski的要求。
话说,佩奇长期的袒护非但未能让Anthony Levandowski有所收敛,反而还让他得寸进尺了。2015年下半年,Anthony Levandowski进一步提议谷歌收购其在谷歌期间创办的激光雷达公司Tyto,这次,佩奇听了后十分震惊,然后拒绝了他。
2016年1月离开公司成立了Otto,这是一家制造自动驾驶工具包以改装大型卡车的公司。Otto于2016年5月推出,并于2016年7月下旬被Uber收购。
2017年,从Google拆分出来的Waymo起诉了Uber,并要求法庭禁止Uber使用Anthony Levandowski从Google盗走的技术。这场官司历时一年后,以Uber向Waymo出让价值2.45亿美元的股票而收场。
更值得关注的是,在起诉Uber的同时,Waymo并没有打算饶过那个忘恩负义的叛徒Anthony Levandowski。
在跟Uber的官司期间,曾一度对Anthony Levandowski无比宠爱的佩奇不再认为Anthony Levandowski曾经是谷歌自动驾驶事业成功的关键人物。他甚至说:我相信,Anthony Levandowski的价值可能是三分功、七分过。
2017年9月,《连线》杂志报道说,莱万多夫斯基建立了一个名为“未来之路”的宗教组织,以“发展和促进基于人工智能的神格”的实现。作为天主教会的前任成员,他的目标是“用基督教道德创造一个人造的上帝”。
2018年12月中旬,Levandowski宣布推出Pronto AI,该公司将为半卡车生产基于摄像头的自动驾驶高速公路改造系统,价格为5000美元。作为概念验证,Levandowski声称在美国全境行驶了3100英里的改装自动驾驶普锐斯。
早在2016年,刚刚从谷歌剥离的Waymo声称,其工程师安东尼·莱万多夫斯基(Anthony Levandowski)和业务主管利奥·罗恩(Lior Ron)违反了多项合约,将Waymo员工和技术带到Uber。
2020年1月10日,据国外媒体报道,Waymo表示,仲裁机构已经裁定,之前跳槽到Uber的两名前员工Anthony Levandowski和业务主管Lior Ron
需要向Waymo赔偿1.28亿美元,外加未披露的法律费用和利息。这一决定也是Waymo和Uber之间一系列法律诉讼的最新进展。
Anthony Levandowski的故事还在继续.....

 浙公网安备 33010602011771号
浙公网安备 33010602011771号