GAMES101 | 作业2:Triangles and Z-buffering
1.作业内容
在屏幕上画出一个实心三角形,换言之,栅格化一个三角形。
2.任务分析
rasterize_triangle()中分为以下几步操作:
2.1创建三角形的2维bounding box
这一步就是计算出三角形平行于坐标轴的外接矩形,减少计算量。
int xmin = floor(std::min(v[0][0],std::min(v[1][0],v[2][0])));
int xmax = ceil(std::max(v[0][0],std::max(v[1][0],v[2][0])));
int ymin = floor(std::min(v[0][1],std::min(v[1][1],v[2][1])));
int ymax = ceil(std::max(v[0][1],std::max(v[1][1],v[2][1])));
2.2遍历像素
遍历上一步的bounding box内的所有像素(使用其整数索引)。然后,使用像素中心(x+0.5,y+0.5)的屏幕空间坐标来检查中心点是否在三角形内。
这里涉及到insideTriangle()函数,判断点P是否在给定三角形ABC内,应用了向量叉积的性质,分别计算\(PA×AB\),\(PB×BC\),\(PC×CA\),若结果指向同一方向即可判定点P在三角形内。
由于本任务在投影变换之后,三角形顶点坐标在这一步可以看作在同一z平面上,简化判定。
static bool insideTriangle(int x, int y, const Vector3f* _v){
float fx=(float)x;
float fy=(float)y;
Vector3f p(fx,fy,1.0f);
Vector3f px[3],xy[3],vt[3],cr[3];
for(int i=0;i<3;i++)vt[i]<<_v[i].x(),_v[i].y(),1.0f;
for(int i=0;i<3;i++){
px[i]=p-vt[i];
xy[i]=vt[(i+1)%3]-vt[i];
cr[i]=px[i].cross(xy[i]);
}
if((cr[0][2]>0&&cr[1][2]>0&&cr[2][2]>0)||(cr[0][2]<0&&cr[1][2]<0&&cr[2][2]<0)){
return true;
}
else{
return false;
}
}
2.3插值计算内部点的深度
这一步应用了框架中的代码。
2.4更新depth_buf
将该点插值出的z坐标z_interpolated与depth_buf中对应记录比较,如果当前点更靠近相机,设置像素颜色并更新深度缓冲区depth_buf。
float x=i+0.5;
float y=j+0.5;
if(insideTriangle(x,y,t.v)){
//插值
auto[alpha, beta, gamma] = computeBarycentric2D(x, y, t.v);
float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
if(z_interpolated < depth_buf[get_index(i,j)]){
depth_buf[get_index(i,j)]=z_interpolated;
Eigen::Vector3f cur(i,j,z_interpolated);
set_pixel(cur,t.getColor());//着色
}
}
2.5输出
3.提高部分
3.1多重采样抗锯齿MultiSampling Anti-Aliasing(MASS)原理
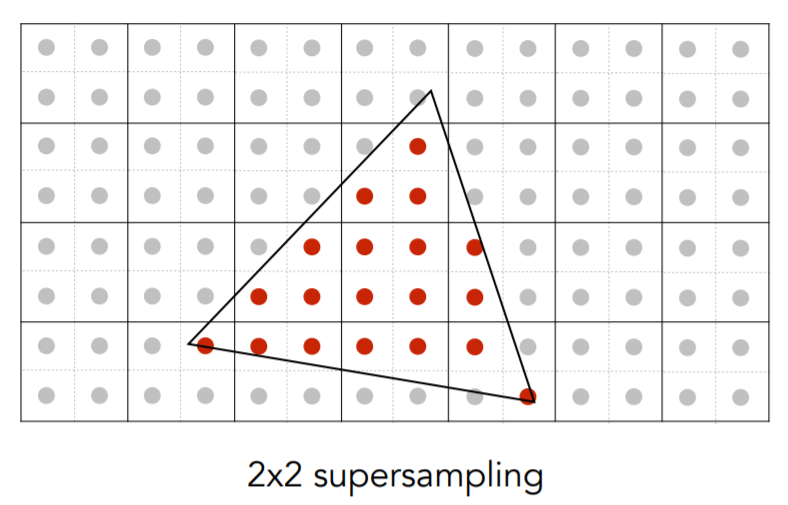
将原本的每个像素\(N×N\)划分,得到\(N^2\)个采样点,对这些点分别着色,最终原像素的值取这些点的平均值,与三角形重合较多的像素颜色更接近该三角形本身。
3.2代码实现
这里我们对每个像素进行2*2采样,实现上,定义四倍大的ss_depth_buf和ss_frame_buf用于子像素的采样。
需要注意的是,由于一单位坐标被分成了4块,insideTriangle()的参数不再是整数,需要修改原框架上的定义。
新二维向量的定义及初始化:
//定义
std::vector< std::vector<Eigen::Vector3f> > ss_frame_buf;
std::vector< std::vector<float> > ss_depth_buf;
//初始化
void rst::rasterizer::clear(rst::Buffers buff)
{
if ((buff & rst::Buffers::Color) == rst::Buffers::Color)
{
std::fill(frame_buf.begin(), frame_buf.end(), Eigen::Vector3f{0, 0, 0});
for (int i = 0; i < ss_frame_buf.size(); i++) {
ss_frame_buf[i].resize(4);
std::fill(ss_frame_buf[i].begin(), ss_frame_buf[i].end(), Eigen::Vector3f{ 0, 0, 0 });
}
}
if ((buff & rst::Buffers::Depth) == rst::Buffers::Depth)
{
std::fill(depth_buf.begin(), depth_buf.end(), std::numeric_limits<float>::infinity());
for (int i = 0; i < ss_depth_buf.size(); i++) {
ss_depth_buf[i].resize(4);
std::fill(ss_depth_buf[i].begin(), ss_depth_buf[i].end(), std::numeric_limits<float>::infinity());
}
}
}
rst::rasterizer::rasterizer(int w, int h) : width(w), height(h)
{
frame_buf.resize(w * h);
depth_buf.resize(w * h);
ss_frame_buf.resize(w * h);
ss_depth_buf.resize(w * h);
}
实现:
for(int i=xmin;i<=xmax;i++){
for(int j=ymin;j<=ymax;j++){
std::vector<Eigen::Vector2f> pos{
{0.25,0.25},{0.75,0.25},
{0.25,0.75},{0.75,0.75},
};
for(int k=0;k<4;k++){
float x=i+pos[k][0];
float y=j+pos[k][1];
if(insideTriangle(x,y,t.v)){
auto[alpha, beta, gamma] = computeBarycentric2D(x, y, t.v);
float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
if(z_interpolated < ss_depth_buf[get_index(i,j)][k]){
ss_depth_buf[get_index(i,j)][k]=z_interpolated;
Eigen::Vector3f cur(i,j,z_interpolated);
ss_set_pixel(cur,t.getColor(),k);
}
}
}
}
}
3.3输出
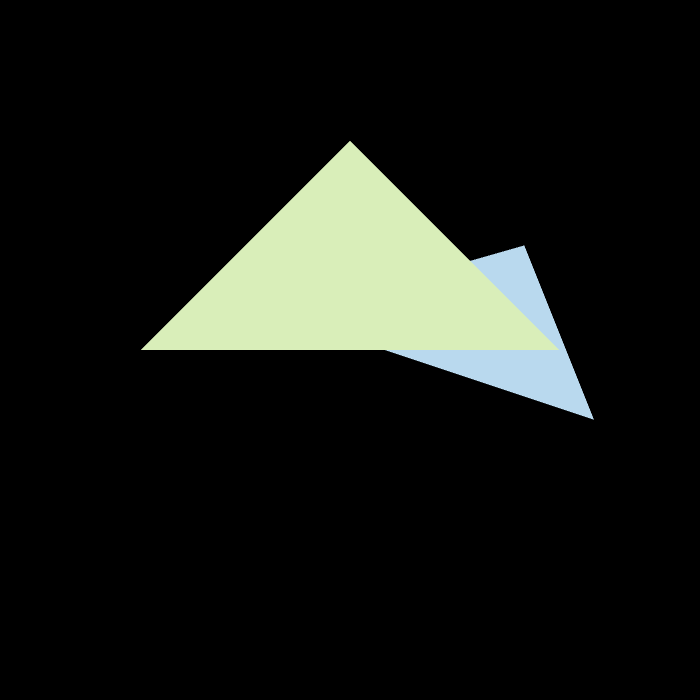
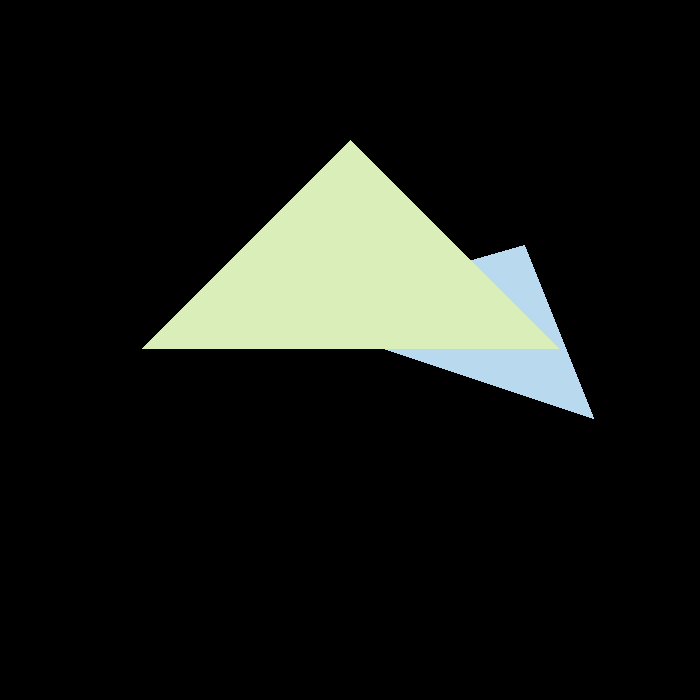
3.4结果对比
左图为原始方法,右图为MASS优化后的结果,可以清晰对比看出优化后显著减少了锯齿。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号