STM32F103C8T6标准库移植FreeRTOS教程
STM32F103C8T6标准库移植FreeRTOS教程
基础项目
找一个基础的Keil项目,在项目根目录里面新建一个FreeRTOS文件夹
不同型号单片机的区别点
- RVDS
- 配置文件
Source
在里面新建Source文件夹

把FreeRTOS源码的七个c文件复制到刚刚新建的Source文件夹里面

portable
在项目的FreeRTOS文件夹里面新建一个portable文件夹
把FreeRTOS源码的RVDS文件夹复制过去
只保留需要的即可。
这里我们保留ARM_CM3

拷贝内存管理文件夹MemMang到项目的portable文件夹

保留4即可,其余的删除。
include
复制include文件夹到FreeRTOS文件夹下面

结果如下

寻找配置文件
到\FreeRTOSv202212.01\FreeRTOS\Demo文件夹下面去找一个对应的
源码里面没有demo的,去这里下载


复制FreeRTOSConfig.h到项目的Core/Inc下面或者USER文件夹下面
添加组
在工程里面新建下面两个组
-
FreeRTOS/Source
-
FreeRTOS/Portable
把7个c文件添加到FreeRTOS/Source里面去

FreeRTOS/Portable添加port.c和heap_4.c文件

添加Include路径
把有头文件的文件夹添加到Include Paths里面
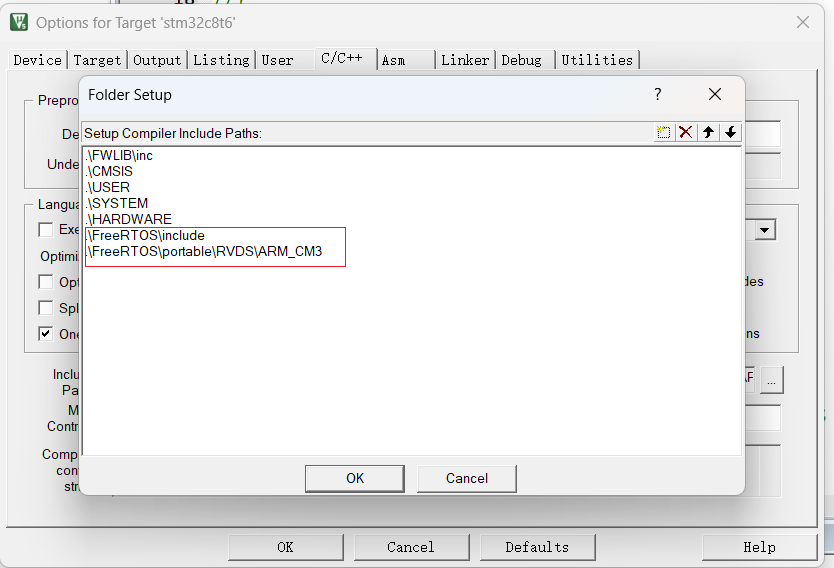
只有这两个文件夹里面有头文件存在
修改配置文件
打开FreeRTOSConfig.h
添加三个宏
#define xPortPendSVHandler PendSV_Handler // 用于上下文切换(任务切换)
#define vPortSVCHandler SVC_Handler // 用于启动第一个任务。
#define xPortSysTickHandler SysTick_Handler // `重命名系统节拍函数

注释中断处理函数
注释掉stm32f1xx_it.c文件里面的SVC_Handler和PendSV_Handler这两个函数,避免重复定义
以及注释SysTick_Handler函数,屏蔽这个中断函数,直接使用freertos的时钟函数来作为嘀嗒定时器回调
109行

126行

136行

测试程序
freertos_demo.h
#ifndef __FREERTOS_DEMO_H
#define __FREERTOS_DEMO_H
void freertos_start(void);
#endif
freertos_demo.c
#include "freertos_demo.h"
#include "FreeRTOS.h"
#include "task.h"
#include <stdio.h>
#include "led.h"
#define START_TASK_STACK 128
#define START_TASK_PRIORITY 1
TaskHandle_t start_task_handle;
void start_task(void *pvParameters);
#define TASK1_STACK 128
#define TASK1_PRIORITY 2
TaskHandle_t task1_handle;
void task1(void *pvParameters);
#define TASK2_STACK 128
#define TASK2_PRIORITY 3
TaskHandle_t task2_handle;
void task2(void *pvParameters);
#define TASK3_STACK 128
#define TASK3_PRIORITY 4
TaskHandle_t task3_handle;
void task3(void *pvParameters);
/// @brief 启动FreeRTOS
/// @param
void freertos_start(void)
{
/* 1. 创建一个启动任务 */
xTaskCreate(start_task,
"start_task",
START_TASK_STACK, NULL,
START_TASK_PRIORITY,
&start_task_handle);
/* 2. 启动任务调度器 */
vTaskStartScheduler();
}
void start_task(void *pvParameters)
{
/* 进入临界区 */
taskENTER_CRITICAL();
xTaskCreate(task1,
"start_task",
TASK1_STACK, NULL,
TASK1_PRIORITY,
&task1_handle);
/* xTaskCreate(task2,
"start_task",
TASK2_STACK, NULL,
TASK2_PRIORITY,
&task2_handle);
xTaskCreate(task3,
"start_task",
TASK3_STACK, NULL,
TASK3_PRIORITY,
&task3_handle);
*/
/* 删除启动任务自己 */
vTaskDelete(NULL);
/* 退出临界区 */
taskEXIT_CRITICAL();
}
void task1(void *pvParameters)
{
while (1)
{
printf("task1运行中...\r\n");
LED_Toggle();
vTaskDelay(500);
}
}
/* void task2(void *pvParameters)
{
while (1)
{
printf("task2运行中...\r\n");
HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_5);
vTaskDelay(500);
}
}
void task3(void *pvParameters)
{
uint8_t key = 0;
while (1)
{
printf("task3运行中...\r\n");
key = Key_Detect();
if(key == KEY1_PRESS){
if(task1_handle!=NULL){
printf("执行删除task1");
vTaskDelete(task1_handle);
task1_handle=NULL;
}
}
vTaskDelay(500);
}
} */
main.c
xxxx
#include "freertos_demo.h"
xxxx
int main(void)
{
freertos_start();
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号