

详细介绍:特征匹配(FeatureMatching)
特征匹配
特征匹配旨在将检测到的特征从一张图像匹配到另一张图像,比较不同图像中的关键属性以找到相似之处。它在计算机视觉中应用广泛,包括场景理解、图像拼接、物体追踪和模式识别。
1. 暴力搜索(Brute Force)
暴力搜索是最直观的匹配方法,几乎不需要技巧,但在大图像或大规模图像集合中非常耗时。在特征匹配中,它类似于将一幅图像的每个像素与另一幅图像的每个像素进行比较,效率低下。
1.1 使用 SIFT 算法暴力搜索
SIFT(Scale-Invariant Feature Transform,尺度不变特征变换)是一种经典的特征检测算法,具有尺度、旋转和部分光照变化鲁棒性。其核心阶段包括:
- 尺度空间极值点检测
- 关键点精确定位
- 方向赋值
- 关键点描述子生成
详细介绍请参考我的文章。
1.1.1 导入必要模块
import cv2
import numpy
import matplotlib.pyplot as plt1.1.2 读取图片
img1 = cv2.imread("img.png", cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread("img_1.png", cv2.IMREAD_GRAYSCALE)
plt.subplot(121)
plt.imshow(img1, cmap='gray')
plt.subplot(122)
plt.imshow(img2, cmap='gray')
plt.show()
1.1.3 SIFT 匹配
sift = cv2.SIFT_create()
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)
good = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good.append([m])
img3 = cv2.drawMatchesKnn(img1, kp1, img2, kp2, good, None,
flags=cv2.DrawMatchesFlags_DRAW_RICH_KEYPOINTS)
plt.imshow(img3, cmap='gray')
plt.axis("off")
plt.show()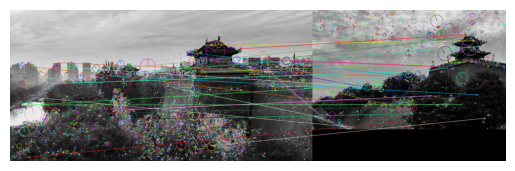
1.2 使用 ORB 暴力搜索
ORB(Oriented FAST and Rotated BRIEF)是一种高效特征检测和描述算法,结合了 FAST 关键点检测和 BRIEF 描述子,适合实时应用。
特点:
- 高效性:计算速度快,适合资源受限设备
- 二进制描述子:存储和匹配效率高
- 旋转不变性:通过关键点方向调整实现
- 尺度适应性:通过图像金字塔实现部分尺度不变
img1 = cv2.imread("img.png", cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread("img_1.png", cv2.IMREAD_GRAYSCALE)
orb = cv2.ORB_create()
kp1, des1 = orb.detectAndCompute(img1, None)
kp2, des2 = orb.detectAndCompute(img2, None)
bf = cv2.BFMatcher()
match = bf.knnMatch(des1, des2, k=2)
good = []
for m, n in match:
if m.distance < 0.75 * n.distance:
good.append([m])
img3 = cv2.drawMatchesKnn(img1, kp1, img2, kp2, good, None,
flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)
2. 使用 FLANN(快速最近邻)匹配
FLANN(Fast Library for Approximate Nearest Neighbors)通过高效的搜索结构(如 k-D 树)快速找到近似相似特征,显著提高匹配速度。
2.1 SIFT + FLANN
img1 = cv2.imread("img.png", cv2.IMREAD_COLOR_RGB)
img2 = cv2.imread("img_1.png", cv2.IMREAD_COLOR_RGB)
sift = cv2.SIFT_create()
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
FLANN_INDEX_KDTREE = 1
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(des1, des2, k=2)
matchesMask = [[0, 0] for i in range(len(matches))]
for i, (m, n) in enumerate(matches):
if m.distance < 0.7 * n.distance:
matchesMask[i] = [1, 0]
draw_params = dict(
matchColor=(0, 255, 0),
singlePointColor=(255, 0, 0),
matchesMask=matchesMask,
flags=cv2.DrawMatchesFlags_DEFAULT,
)
img3 = cv2.drawMatchesKnn(img1, kp1, img2, kp2, matches, None, **draw_params)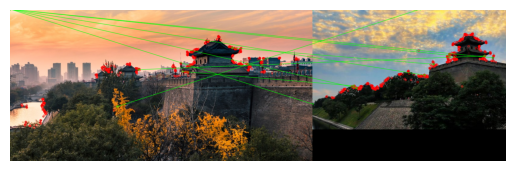
2.2 ORB + FLANN
orb = cv2.ORB_create()
kp1, des1 = orb.detectAndCompute(img1, None)
kp2, des2 = orb.detectAndCompute(img2, None)
FLANN_INDEX_LSH = 6
index_params = dict(algorithm=FLANN_INDEX_LSH, table_number=12, key_size=20, multi_probe_level=2)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(des1, des2, k=2)
matchesMask = [[0, 0] for i in range(len(matches))]
for i, match in enumerate(matches):
if len(match) == 2:
m, n = match
if m.distance < 0.7 * n.distance:
matchesMask[i] = [1, 0]
draw_params = dict(
matchColor=(0, 255, 0),
singlePointColor=(255, 0, 0),
matchesMask=matchesMask,
flags=cv2.DrawMatchesFlags_DEFAULT,
)
img3 = cv2.drawMatchesKnn(img1, kp1, img2, kp2, matches, None, **draw_params)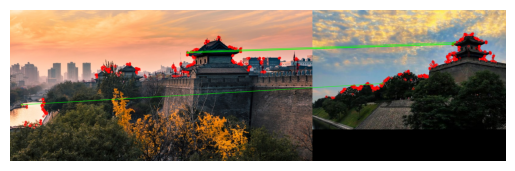
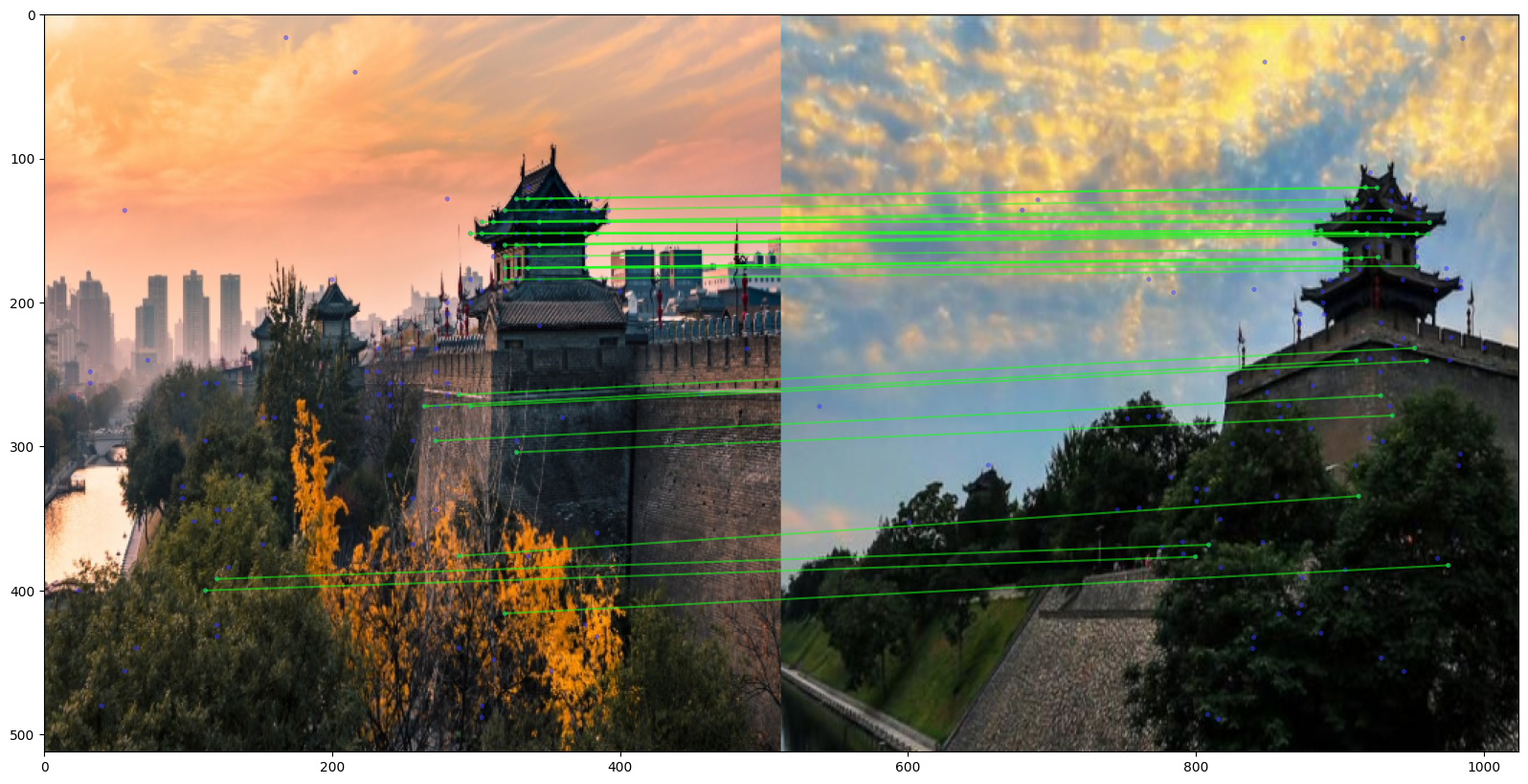
3. 局部特征匹配与 Transformer(LoFTR)
LoFTR(Local Feature TRansformer)由 Sun 等人提出,是一种基于 Transformer 的无检测器局部特征匹配方法。它不依赖传统特征检测器,而是直接学习匹配图像中的关键点,具有稳健性和变换不变性。
3.1 导入必要模块
import kornia as K
import kornia.feature as KF
import torch
from kornia_moons.viz import draw_LAF_matches
from kornia.feature import LoFTR3.2 LoFTR 匹配
img1 = K.io.load_image("img.png", K.io.ImageLoadType.RGB32)[None, ...]
img2 = K.io.load_image("img_1.png", K.io.ImageLoadType.RGB32)[None, ...]
img1 = K.geometry.resize(img1, (512, 512), antialias=True)
img2 = K.geometry.resize(img2, (512, 512), antialias=True)
matcher = LoFTR(pretrained="outdoor")
input_dict = {
"image0": K.color.rgb_to_grayscale(img1),
"image1": K.color.rgb_to_grayscale(img2),
}
with torch.inference_mode():
correspondences = matcher(input_dict)
mkpts0 = correspondences["keypoints0"].cpu().numpy()
mkpts1 = correspondences["keypoints1"].cpu().numpy()
Fm, inliers = cv2.findFundamentalMat(mkpts0, mkpts1,
cv2.USAC_MAGSAC, 0.5, 0.999, 100000)
inliers = inliers > 03.3 可视化
draw_LAF_matches(
KF.laf_from_center_scale_ori(
torch.from_numpy(mkpts0).view(1, -1, 2),
torch.ones(mkpts0.shape[0]).view(1, -1, 1, 1),
torch.ones(mkpts0.shape[0]).view(1, -1, 1),
),
KF.laf_from_center_scale_ori(
torch.from_numpy(mkpts1).view(1, -1, 2),
torch.ones(mkpts1.shape[0]).view(1, -1, 1, 1),
torch.ones(mkpts1.shape[0]).view(1, -1, 1),
),
torch.arange(mkpts0.shape[0]).view(-1, 1).repeat(1, 2),
K.tensor_to_image(img1),
K.tensor_to_image(img2),
inliers,
draw_dict={
"inlier_color": (0.1, 1, 0.1, 0.5),
"tentative_color": None,
"feature_color": (0.2, 0.2, 1, 0.5),
"vertical": False,
},
)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号