
深入理解HashMap的扩容机制
深入理解HashMap的扩容机制
——原创:转载请注明出处 http://www.cnblogs.com/yanzige/p/8392142.html
注:本文分两部分讲解,第一部分讲解Java7,第二部分讲解Java8
Java 7 中Hashmap扩容机制
一、什么时候扩容:
网上总结的会有很多,但大多都总结的不够完整或者不够准确。大多数可能只说了满足我下面条件一的情况。
扩容必须满足两个条件:
1、 存放新值的时候当前已有元素的个数必须大于等于阈值
2、 存放新值的时候当前存放数据发生hash碰撞(当前key计算的hash值换算出来的数组下标位置已经存在值)
二、下面我们看源码,如下:
首先是put()方法
public V put(K key, V value) {
//判断当前Hashmap(底层是Entry数组)是否存值(是否为空数组)
if (table == EMPTY_TABLE) {
inflateTable(threshold);//如果为空,则初始化
}
//判断key是否为空
if (key == null)
return putForNullKey(value);//hashmap允许key为空
//计算当前key的哈希值
int hash = hash(key);
//通过哈希值和当前数据长度,算出当前key值对应在数组中的存放位置
int i = indexFor(hash, table.length);
for (Entry<K,V> e = table[i]; e != null; e = e.next) {
Object k;
//如果计算的哈希位置有值(及hash冲突),且key值一样,则覆盖原值value,并返回原值value
if (e.hash == hash && ((k = e.key) == key || key.equals(k))) {
V oldValue = e.value;
e.value = value;
e.recordAccess(this);
return oldValue;
}
}
modCount++;
//存放值的具体方法
addEntry(hash, key, value, i);
return null;
}
在put()方法中有调用addEntry()方法,这个方法里面是具体的存值,在存值之前还要判断是否需要扩容
void addEntry(int hash, K key, V value, int bucketIndex) {
//1、判断当前个数是否大于等于阈值
//2、当前存放是否发生哈希碰撞
//如果上面两个条件否发生,那么就扩容
if ((size >= threshold) && (null != table[bucketIndex])) {
//扩容,并且把原来数组中的元素重新放到新数组中
resize(2 * table.length);
hash = (null != key) ? hash(key) : 0;
bucketIndex = indexFor(hash, table.length);
}
createEntry(hash, key, value, bucketIndex);
}
贴上Entry类的源码
static class Entry<K,V> implements Map.Entry<K,V> { final K key; V value; Entry<K,V> next;// 通过next构成一个单向链表 int hash; /** * Creates new entry. */ Entry(int h, K k, V v, Entry<K,V> n) { value = v; next = n; key = k; hash = h; } }
如果需要扩容,调用扩容的方法resize()
void resize(int newCapacity) {
Entry[] oldTable = table;
int oldCapacity = oldTable.length;
//判断是否有超出扩容的最大值,如果达到最大值则不进行扩容操作
if (oldCapacity == MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return;
}
Entry[] newTable = new Entry[newCapacity];
// transfer()方法把原数组中的值放到新数组中
transfer(newTable, initHashSeedAsNeeded(newCapacity));
//设置hashmap扩容后为新的数组引用
table = newTable;
//设置hashmap扩容新的阈值
threshold = (int)Math.min(newCapacity * loadFactor, MAXIMUM_CAPACITY + 1);
}
transfer()在实际扩容时候把原来数组中的元素放入新的数组中
void transfer(Entry[] newTable, boolean rehash) {
int newCapacity = newTable.length;
for (Entry<K,V> e : table) {
while(null != e) {
Entry<K,V> next = e.next;
if (rehash) {
e.hash = null == e.key ? 0 : hash(e.key);
}
//通过key值的hash值和新数组的大小算出在当前数组中的存放位置
int i = indexFor(e.hash, newCapacity);
e.next = newTable[i];
newTable[i] = e;
e = next;
}
}
}
JDK7版本及以前使用是:头插法(对比JDK8使用的是尾插法)
注:使用头插法在多线程扩容的时候可能会导致循环指向,从而在获取数据get()的时候陷入死循环,导致线程执行无法结束。
头插法:
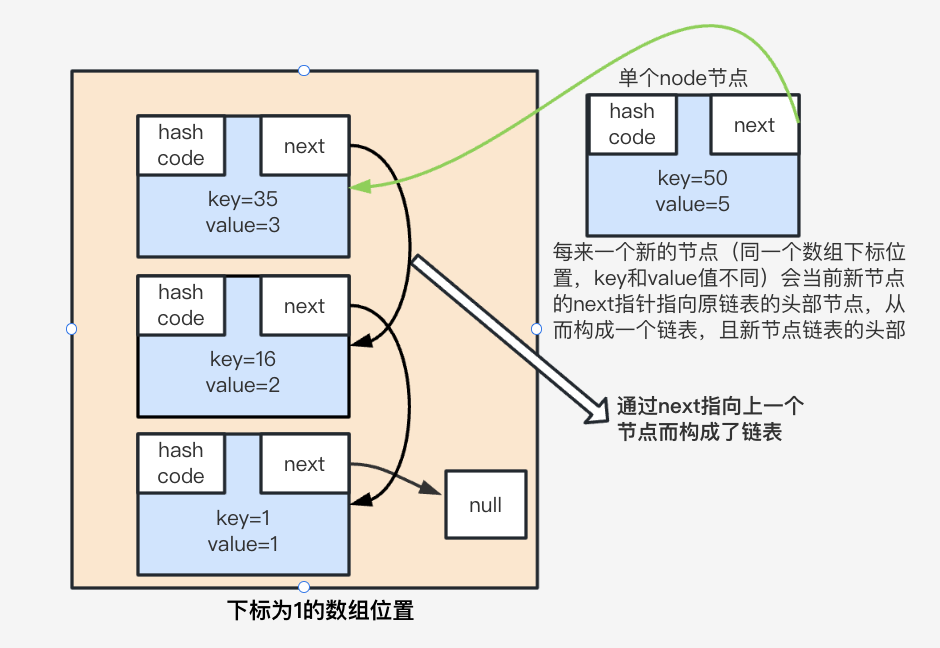
后来的(新插入的)节点会被插入到头部,并将head节点指向当前新节点,再将当前新节点的next指针指向之前的头部节点,这样整个链表越早插入的就逐渐到了链表的尾部,越晚插入的就存放在了链表的头部。
在扩容的时候,先取头部节点,然后把头部节点放到新对应数组下标的链表处,由于头插法,最早取出的节点会被最先放进,并逐步变成链表的最尾部,如果多线程执行扩容,将数组下标3位置处链表存入的A->B->C,扩容时存入到新的数组(假设扩容后A/B/C还在同一个链表上),线程1取第一个节点A被挂起,挂起的A节点的next指向B节点,而线程2扩容将头部B节点(原头部A节点已经被取走,B节点成为原链表的头结点)放入新的链表时,A节点被先放但没有完成,线程2在放入B节点后,B节点的next指向之前放入的A节点,当线程1执行的时候本身A的next指向B,这样就行程了循环引用,最后存入C节点,并将C节点的next指向B,最终就变成C->B-><-A,在get()方法执行到该数组下标时,遍历链表查找的时候就会出现死循环。
尾插法:元素插入的时候都是从尾部插入,这样新进来的就在头部,后进来的就在尾部,扩容的时候,先进来的先出,指向next和扩容前方向一致,所以不存在循环指向的问题。
JDK7存入元素到同一个数组下标位置的链表处,每次存入的新元素是在链表的头部:
HashMap map = new HashMap<Integer,Integer>(16); map.put(1,1); map.put(16,2); map.put(35,3); map.put(50,4); map.put(69,5); map.put(84,6); map.put(103,7); map.put(136,8); map.put(153,9); map.put(170,10); map.put(187,11); map.put(204,12); map.put(221,13);
如上面代码,在前12个元素存入数字下标为1的位置,那么链表是如下构成
源码解读:
public V put(K key, V value) { // ...省略很多源码,看红色的方法 modCount++; addEntry(hash, key, value, i);// i为上面省略处计算的数组下标 return null; }
void addEntry(int hash, K key, V value, int bucketIndex) { if ((size >= threshold) && (null != table[bucketIndex])) { resize(2 * table.length); hash = (null != key) ? hash(key) : 0; bucketIndex = indexFor(hash, table.length); } createEntry(hash, key, value, bucketIndex); }
void createEntry(int hash, K key, V value, int bucketIndex) { Entry<K,V> e = table[bucketIndex]; // bucketIndex 为数组下标,第一个元素进来时table[下标位置]=null,所以对应代码 put(1,1) 上图node第一个节点的 next 就为空 table[bucketIndex] = new Entry<>(hash, key, value, e);// e表示上一个节点,将上一个节点放到新节点的next处——》并且将新new Entry对象给到当前table[数组下标位置] size++; }
所以这个过程下来,新节点就在链表的头部位置,最早被加入的Entry节点在最尾的位置。
三、总结:
Hashmap的扩容需要满足两个条件:当前数据存储的数量(即size())大小必须大于等于阈值;当前加入的数据是否发生了hash冲突。
因为上面这两个条件,所以存在下面这些情况
(1)、就是hashmap在存值的时候(默认大小为16,负载因子0.75,阈值12),可能达到最后存满16个值的时候,再存入第17个值才会发生扩容现象,因为前16个值,每个值在底层数组中分别占据一个位置,并没有发生hash碰撞。
(2)、当然也有可能存储更多值(超多16个值,最多可以存27个值)都还没有扩容。原理:前11个值全部hash碰撞,存到数组的同一个位置(虽然hash冲突,但是这时元素个数小于阈值12,并没有同时满足扩容的两个条件。所以不会扩容),[在存入第12个元素的时候,还是存入前面11个元素所在的下标位置,因为存入之前此时比较当前元素个数 11<12(16*0.75),所以在存入第12个元素的时候不会发生扩容,那么还有15个数据下标的位置是空的,后面所有存入的15个值全部分散到数组剩下的15个位置(这时元素个数大于等于阈值,但是每次存入的元素并没有发生hash碰撞,也没有同时满足扩容的两个条件,所以叶不会扩容),前面11+15=26(12+15=27评论指正,20201230日晚验证后修改为27),所以在存入第28个值的时候才同时满足上面两个条件,这时候才会发生扩容现象。
---------------------------------------------------------------------------- 2020年3月25号 更新下 ----------------------------------------------------------------------------
Java 8 中Hashmap扩容机制
一、Java8的扩容机制:
Java8不再像Java7中那样需要满足两个条件,Java8中扩容只需要满足一个条件:当前存放新值(注意不是替换已有元素位置时)的时候已有元素的个数大于等于阈值(已有元素等于阈值,下一个存放后必然触发扩容机制)
注:
(1)扩容一定是放入新值的时候,该新值不是替换以前位置的情况下(说明:put(“name”,"zhangsan"),而map里面原有数据<"name","lisi">,则该存放过程就是替换一个原有值,而不是新增值,则不会扩容)
(2)扩容发生在存放后,即是数据存放后(先存放后扩容),判断当前存入对象的个数,如果大于阈值则进行扩容。
二、背静知识:
Java7中Hashmap底层采用的是Entry对数组,而每一个Entry对又向下延伸是一个链表,在链表上的每一个Entry对不仅存储着自己的key/value值,还存了一个当前对象的hash值和指向下一个地址的next Node节点。
Java8中的Hashmap底层结构有一定的变化,还是使用的数组,但是数组的对象以前是Entry对,现在换成了Node对象(可以理解是Entry对,结构一样,存储时也会存key/value键值对、当前对象的hash值和指向下一个地址的next Node节点),以前所有的Entry向下延伸都是链表,Java8变成链表和红黑树的组合,数据少量存入的时候优先还是链表,当链表长度大于8,且数组长度大于64的时候,链表就会转化成红黑树,所以你会看到Java8的Hashmap的数据存储是数组+链表+红黑树的组合,如果数组长度小于64则只有数组+链表,如果数组长度大于64,且某一个数组下标数据量大于8,那么该处即为红黑树。
贴上Node类的源码
static class Node<K,V> implements Map.Entry<K,V> { final int hash; final K key; V value; Node<K,V> next;// 和JDK7中的Entry一样,都是通过next来构建单向链表 Node(int hash, K key, V value, Node<K,V> next) { this.hash = hash; this.key = key; this.value = value; this.next = next; } // 下面省略该类的一些方法,主要是看上面的内部结构 }
三、源码:
在JDK7中,当new Hashmap()的时候会对对象进行初始化,而JDK8中new Hashmap()并没有对对象进行初始化,而是在put()方法中通过判断对象是否为空,如果为空通过调用resize()来初始化对象。
public V put(K key, V value) { return putVal(hash(key), key, value, false, true); }
/** * Implements Map.put and related methods * * @param hash key值计算传来的下标 * @param key * @param value * @param onlyIfAbsent true只是在值为空的时候存储数据,false都存储数据 * @param evict * @return 返回被覆盖的值,如果没有覆盖则返回null */ final V putVal(int hash, K key, V value, boolean onlyIfAbsent, boolean evict) { // 申明entry数组对象tab[]:当前Entry[]对象 Node<K,V>[] tab; // 申明entry对象p:这里表示存放的单个节点 Node<K,V> p; // n:为当前Entry对象长度
// i:为当前存放对象节点的位置下标 int n, i; /** * 流程判断 * 1、如果当前Node数组(tab)为空,则直接创建(通过resize()创建),并将当前创建后的长度设置给n * 2、如果要存放对象所在位置的Node节点为空,则直接将对象存放位置创建新Node,并将值直接存入 * 3、存放的Node数组不为空,且存放的下标节点Node不为空(该Node节点为链表的首节点) * 1)比较链表的首节点存放的对象和当前存放对象是否为同一个对象,如果是则直接覆盖并将原来的值返回 * 2)如果不是分两种情况 * (1)存储处节点为红黑树node结构,调用方法putTreeVal()直接将数据插入 * (2)不是红黑树,则表示为链表,则进行遍历 * A.如果在链表中不存在key相同的node节点,则直接将该值存入链表尾部的空节点,存入后检查当前存入位置是否已经大于链表的第8个位置 * a.如果大于,调用treeifyBin方法判断是扩容 还是 需要将该链表转红黑树(大于8且数组长度大于64则转红黑色,否则对数组进行扩容) * b.当前存入位置链表长度没有大于8,则存入成功,结束循环操作。 * B.如果存入链表的下一个位置有值,且该key和存入对象“一样”,在for循环中直接break,将给key相同的node节点赋值给e,在外面做统一处理 * 上面AB两种情况执行完成后,判断返回的原对象是否为空,如果不为空,则将原对象的原始value返回 * 上面123三种情况下,如果没有覆盖原值,则表示新增存入数据,存储数据完成后,size+1,然后判断当前数据量是否大于阈值, * 如果大于阈值,则进行扩容。 */ if ((tab = table) == null || (n = tab.length) == 0) n = (tab = resize()).length; if ((p = tab[i = (n - 1) & hash]) == null) tab[i] = newNode(hash, key, value, null); else { Node<K,V> e; K k; if (p.hash == hash && ((k = p.key) == key || (key != null && key.equals(k)))) e = p; else if (p instanceof TreeNode) // 按照红黑树直接将数据存入 e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value); else { for (int binCount = 0; ; ++binCount) {
// for循环中有两个if,如果没有key相同(第二个if没有break),那么表示遍历完了链表直接将值插入链表尾部(尾插法使用p.next=newNode()) if ((e = p.next) == null) { p.next = newNode(hash, key, value, null); if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st treeifyBin(tab, hash);//该方法判断是扩容还是需要将该链表转红黑树 break; }
// 如果存入链表的下一个位置有值,且该key和存入对象“一样”,直接break,将给key相同的node节点赋值给e(在上一步if中已经赋值了),在外面做统一处理 if (e.hash == hash && ((k = e.key) == key || (key != null && key.equals(k)))) break;
// 每遍历一次在第一个if((e=p.next) == null)中从头到尾将每一个Node()节点复制给e,然后再将e赋值给p,使得链表完成从头到尾的遍历过程 p = e; } } if (e != null) { // existing mapping for key V oldValue = e.value; if (!onlyIfAbsent || oldValue == null) e.value = value; afterNodeAccess(e); return oldValue; } } ++modCount; // 如果不是替换数据存入,而是新增位置存入后,则将map的size进行加1,然后判断容量是否超过阈值,超过则扩容 if (++size > threshold) resize(); afterNodeInsertion(evict); return null; }
treeifyBin()方法判断是扩容还是将当前链表转红黑树
/** * Replaces all linked nodes in bin at index for given hash unless * table is too small, in which case resizes instead. * 从指定hash位置处的链表nodes头部开始,全部替换成红黑树结构。 * 除非整个数组对象(Map集合)数据量很小(数组长度小于64),该情况下则通过resize()对这个Map进行扩容,而代替将链表转红黑树的操作。 */ final void treeifyBin(HashMap.Node<K,V>[] tab, int hash) { int n, index; HashMap.Node<K,V> e; // 如果Map(数组)为空或者当前存入数据数组长度小于64便进行扩容 if (tab == null || (n = tab.length) < MIN_TREEIFY_CAPACITY) resize(); // 如果数组长度大于64则将正在存入的该值所在的链表转化成红黑树 else if ((e = tab[index = (n - 1) & hash]) != null) { HashMap.TreeNode<K,V> hd = null, tl = null; do { HashMap.TreeNode<K,V> p = replacementTreeNode(e, null); if (tl == null) hd = p; else { p.prev = tl; tl.next = p; } tl = p; } while ((e = e.next) != null); if ((tab[index] = hd) != null) hd.treeify(tab); } }
四、总结:
(1)Java 8 在新增数据存入成功后进行扩容
(2)扩容会发生在两种情况下(满足任意一种条件即发生扩容):
a 当前存入数据大于阈值即发生扩容
b 存入数据到某一条链表时,此时该链表数据个数大于8,且数组长度小于64即发生扩容
(3)此外需要注意一点java7是在存入数据前进行判断是否扩容,而java8是在存入数据后再进行扩容的判断。
ConcurrentHashMap知识参考:https://www.cnblogs.com/zerotomax/p/8687425.html
Java8 HashMap扩容可参考:https://blog.csdn.net/goosson/article/details/81029729 (注:该文章中关于Java8 底层数据结构描述不准确,只有当数组长度大于64才会有红黑树+链表)
这里补充一下JDK8关于红黑树和链表的知识:
第一次添加元素的时候,默认初期长度为16,当往map中继续添加元素的时候,通过hash值跟数组长度取“与”来决定放在数组的哪个位置,如果出现放在同一个位置的时候,优先以链表的形式存放,在同一个位置的个数又达到了8个(代码是>=7,从0开始,及第8个开始判断是否转化成红黑树),如果数组的长度还小于64的时候,则会扩容数组。如果数组的长度大于等于64的话,才会将该节点的链表转换成树。在扩容完成之后,如果某个节点是树结构,同时现在该节点的node个数小于等于6,则会将该树转为链表。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号