
建筑垃圾检测数据集介绍-78张图片 建筑工地废弃物管理 城市环境监测 废弃物回收自动化 安全巡检 环保监管 建筑垃圾处理设备研发 - 详解
点击查看-已发布目标检测数据集合集(持续更新)
| 数据集名称 | 图像数量 | 应用方向 | 博客链接 |
|---|---|---|---|
| 电网巡检检测数据集 | 1600 张 | 电力设备目标检测 | 点击查看 |
| 火焰 / 烟雾 / 人检测数据集 | 10000张 | 安防监控,多目标检测 | 点击查看 |
| 高质量车牌识别数据集 | 10,000 张 | 交通监控 / 车牌识别 | 点击查看 |
| 农田杂草航拍检测数据集 | 1,200 张 | 农业智能巡检 | 点击查看 |
| 航拍绵羊检测数据集 | 1,700 张 | 畜牧监控 / 航拍检测 | 点击查看 |
| ️ 热成像人体检测数据集 | 15,000 张 | 热成像下的行人检测 | 点击查看 |

建筑垃圾检测数据集介绍-78张图片-文章末添加wx领取数据集

建筑垃圾检测数据集介绍
数据集概览
本数据集由皇家墨尔本理工大学提供,旨在支持建筑垃圾的计算机视觉识别与分类任务。数据集涵盖多种建筑废弃物的目标检测,包含78张图像,适合训练多类别检测模型以提升建筑场所废弃物管理效率与资源回收利用。
- 图像数量:78 张
- 类别数:14 类
- 适用任务:目标检测(Object Detection)
- 适配模型:YOLOv5、YOLOv8、Faster R-CNN、SSD 等主流框架
包含类别
| 类别 | 英文名称 | 描述 |
|---|---|---|
| 砖块 | Brick | 建筑用粘土或混凝土砖块 |
| 纸箱 | Carton | 纸质包装容器 |
| 陶瓷 | Ceramic | 瓷器、陶瓷碎片 |
| 混凝土 | Concrete | 各种混凝土废料 |
| 已丢弃废物 | Disposed Waste | 非具体分类的一般废物 |
| 惰性物 | Inert | 不易分解无害废弃物 |
| 金属 | Metal | 铁、钢等金属废弃物 |
| 塑料 | Plastic | 各种塑料制品或碎片 |
| 聚苯乙烯 | Polystyrene | 保温、包装用泡沫塑料 |
| 翻滚式垃圾箱 | Roll-Off Dumpster | 大型建筑垃圾收集容器 |
| 临时废弃物 | Temporary Waste | 临时存放的建筑废弃物 |
| 垃圾袋 | Trash Bag | 建筑垃圾装袋 |
| 木材 | Wood | 建筑用木材及废弃物 |
| 木札板 | Wood Pallet | 装载用木质托盘 |
本数据集覆盖了建筑工地中常见的14种废弃物类别,数据标注细致,适用性强,能有效提升建筑垃圾自动识别与分类的准确度,助力环保和资源再利用技术研发。
应用场景
建筑工地废弃物管理(Construction Site Waste Management)
自动识别和分类建筑废物,优化垃圾收集和分类流程,提升现场环境整洁度。城市环境监测(Urban Environmental Monitoring)
利用无人机或摄像头监测城市建筑废弃物堆放状况,促进城市可持续发展。废弃物回收自动化(Automated Waste Recycling)
支持智能分拣设备识别不同材质废弃物,提高回收效率和资源再利用率。安全巡检(Safety Inspection)
监测工地临时废弃物堆放,减少安全隐患,保障施工安全。环保监管(Environmental Regulation Enforcement)
辅助监管部门监测建筑垃圾处理合规性,防止非法倾倒和环境污染。建筑垃圾处理设备研发(Construction Waste Processing Equipment)
基于准确检测数据,推动智能分解与分类设备技术创新。
数据样本展示
以下展示部分数据集内的样本图片(均带有目标检测框):
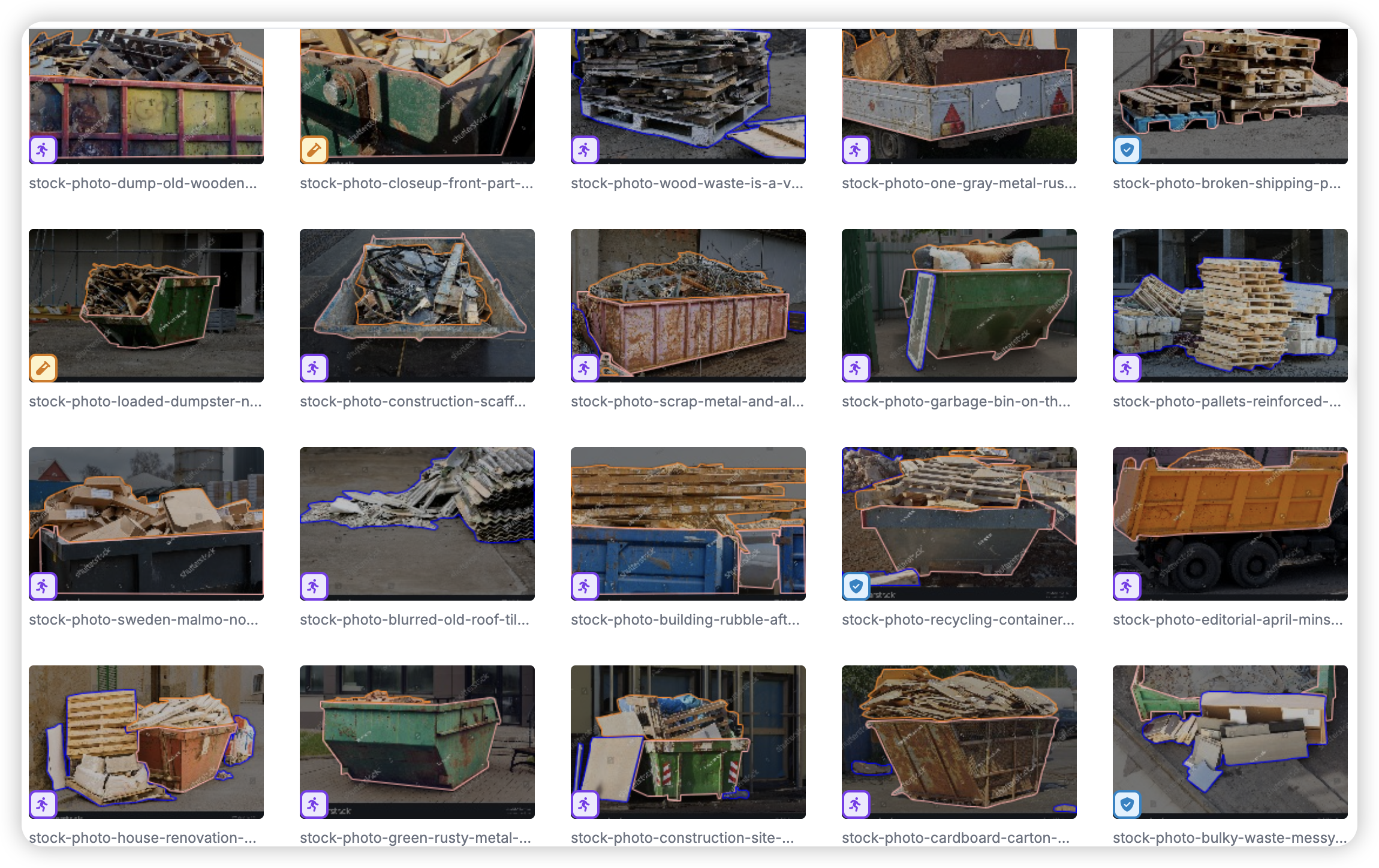

数据集包含以下特征:
- 多类别标注:涵盖砖块、金属、塑料等14类废弃物
- 细粒度检测框:针对物体边缘精准标注,提高识别准确率
- 多样场景采集:包括不同工地的各种临时废弃物堆放环境
- 实用性强:聚焦真实建筑废弃物处理场景,便于实际部署
- 适配性广:兼容多种主流目标检测模型结构
数据集具备多样化场景及丰富类别,能够有效支撑建筑垃圾识别模型的训练,提升模型泛化能力与实际应用表现。
使用建议
数据预处理优化
- 进行图像增强(旋转、缩放、色彩调整)以提升模型鲁棒性
- 处理检测框标签,确保类别均衡,避免偏斜
- 利用数据清洗去除遮挡严重或标注模糊的样本
模型训练策略
- 采用迁移学习加速收敛,利用预训练权重提升表现
- 使用多尺度训练以适应不同大小建筑垃圾目标
- 结合类别权重调整,平衡类别不平衡问题
实际部署考虑
- 轻量化模型设计:便于嵌入式设备和移动端部署
- 实时检测能力:优化推理速度,满足现场实时监控需求
- 环境适应性:增强对不同光照和遮挡条件的识别能力
应用场景适配
- 工地管理系统集成:与现场监控系统结合实现自动预警
- 智能分拣机器人配合:输出标准化检测结果,辅助机械臂操作
- 环保监管平台支持:提供废弃物统计和质量评估功能
性能监控与改进
- 持续收集新场景数据,细化难分类别样本
- 定期评估模型召回率与精确度,优化检测阈值
- 利用用户反馈调整模型参数,实现闭环改进
数据集特色
- 多类别覆盖:包含14种建筑废弃物类型
- 精准标注:高质量边界框与类别标签
- 多场景采集:适用不同工地环境
- 兼容主流模型:支持YOLO、Faster R-CNN等
- 实际应用导向:聚焦建筑垃圾识别需求
商业价值
- 环保行业:提升建筑垃圾分类与回收效率
- 建筑施工管理:辅助工地废弃物监控与安全管理
- 智能硬件制造:支持智能分拣与识别设备研发
- 城市管理部门:助力环境监管与非法倾倒防控
技术标签
计算机视觉目标检测建筑垃圾深度学习YOLOFaster R-CNN多类别识别环境监测数据增强智能分拣模型部署工业应用
注意: 本数据集适用于建筑垃圾管理领域的科研、教育和商业用途。使用时请遵守环境保护和数据使用相关法律法规,确保数据处理符合伦理要求。建议结合现场专业知识进行检测结果的验证与优化。
YOLOv8 训练实战
本教程介绍如何使用 YOLOv8 对目标进行识别与检测。涵盖环境配置、数据准备、训练模型、模型推理和部署等全过程。
1. 环境配置
建议使用 Python 3.8+,并确保支持 CUDA 的 GPU 环境。
# 创建并激活虚拟环境(可选)
python -m venv yolov8_env
source yolov8_env/bin/activate # Windows 用户使用 yolov8_env\Scripts\activate安装 YOLOv8 官方库 ultralytics
pip install ultralytics2. 数据准备
2.1 数据标注格式(YOLO)
每张图像对应一个 .txt 文件,每行代表一个目标,格式如下:
所有值为相对比例(0~1)。
类别编号从 0 开始。
2.2 文件结构示例
datasets/
├── images/
│ ├── train/
│ └── val/
├── labels/
│ ├── train/
│ └── val/2.3 创建 data.yaml 配置文件
path: ./datasets
train: images/train
val: images/val
nc: 11
names: ['Bent_Insulator', 'Broken_Insulator_Cap', '', ...]3. 模型训练
YOLOv8 提供多种模型:yolov8n, yolov8s, yolov8m, yolov8l, yolov8x。可根据设备性能选择。
yolo detect train \
model=yolov8s.pt \
data=./data.yaml \
imgsz=640 \
epochs=50 \
batch=16 \
project=weed_detection \
name=yolov8s_crop_weed| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
model | 字符串 | - | 指定基础模型架构文件或预训练权重文件路径(.pt/.yaml) |
data | 字符串 | - | 数据集配置文件路径(YAML 格式),包含训练/验证路径和类别定义 |
imgsz | 整数 | 640 | 输入图像的尺寸(像素),推荐正方形尺寸(如 640x640) |
epochs | 整数 | 100 | 训练总轮次,50 表示整个数据集会被迭代 50 次 |
batch | 整数 | 16 | 每个批次的样本数量,值越大需要越多显存 |
project | 字符串 | - | 项目根目录名称,所有输出文件(权重/日志等)将保存在此目录下 |
name | 字符串 | - | 实验名称,用于在项目目录下创建子文件夹存放本次训练结果 |
关键参数补充说明:
model=yolov8s.pt- 使用预训练的 YOLOv8 small 版本(平衡速度与精度)
- 可用选项:
yolov8n.pt(nano)/yolov8m.pt(medium)/yolov8l.pt(large)
data=./data.yaml# 典型 data.yaml 结构示例 path: ../datasets/weeds train: images/train val: images/val names: 0: Bent_Insulator 1: Broken_Insulator_Cap 2: ... 3: ...
4. 模型验证与测试
4.1 验证模型性能
yolo detect val \
model=runs/detect/yolov8s_crop_weed/weights/best.pt \
data=./data.yaml| 参数 | 类型 | 必需 | 说明 |
|---|---|---|---|
model | 字符串 | 是 | 要验证的模型权重路径(通常为训练生成的 best.pt 或 last.pt) |
data | 字符串 | 是 | 与训练时相同的 YAML 配置文件路径,需包含验证集路径和类别定义 |
关键参数详解
model=runs/detect/yolov8s_crop_weed/weights/best.pt- 使用训练过程中在验证集表现最好的模型权重(
best.pt) - 替代选项:
last.pt(最终epoch的权重) - 路径结构说明:
runs/detect/ └── [训练任务名称]/ └── weights/ ├── best.pt # 验证指标最优的模型 └── last.pt # 最后一个epoch的模型
- 使用训练过程中在验证集表现最好的模型权重(
data=./data.yaml- 必须与训练时使用的配置文件一致
- 确保验证集路径正确:
val: images/val # 验证集图片路径 names: 0: crop 1: weed
常用可选参数
| 参数 | 示例值 | 作用 |
|---|---|---|
batch | 16 | 验证时的批次大小 |
imgsz | 640 | 输入图像尺寸(需与训练一致) |
conf | 0.25 | 置信度阈值(0-1) |
iou | 0.7 | NMS的IoU阈值 |
device | 0/cpu | 选择计算设备 |
save_json | True | 保存结果为JSON文件 |
典型输出指标
Class Images Instances P R mAP50 mAP50-95
all 100 752 0.891 0.867 0.904 0.672
crop 100 412 0.912 0.901 0.927 0.701
weed 100 340 0.870 0.833 0.881 0.6434.2 推理测试图像
yolo detect predict \
model=runs/detect/yolov8s_crop_weed/weights/best.pt \
source=./datasets/images/val \
save=True5. 自定义推理脚本(Python)
from ultralytics import YOLO
import cv2
# 加载模型
model = YOLO('runs/detect/yolov8s_crop_weed/weights/best.pt')
# 推理图像
results = model('test.jpg')
# 可视化并保存结果
results[0].show()
results[0].save(filename='result.jpg')6. 部署建议
✅ 本地运行:通过 Python 脚本直接推理。
Web API:可用 Flask/FastAPI 搭建检测接口。
边缘部署:YOLOv8 支持导出为 ONNX,便于在 Jetson、RKNN 等平台上部署。
导出示例:
yolo export model=best.pt format=onnx总结流程
| 阶段 | 内容 |
|---|---|
| ✅ 环境配置 | 安装 ultralytics, PyTorch 等依赖 |
| ✅ 数据准备 | 标注图片、组织数据集结构、配置 YAML |
| ✅ 模型训练 | 使用命令行开始训练 YOLOv8 模型 |
| ✅ 验证评估 | 检查模型准确率、mAP 等性能指标 |
| ✅ 推理测试 | 运行模型检测实际图像目标 |
| ✅ 高级部署 | 导出模型,部署到 Web 或边缘设备 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号