
【C++】哈希扩展——位图和布隆过滤器的介绍与实现 - 指南
各位读者大佬好,我是落羽!一个坚持不断学习进步的学生。
如果您觉得我的文章还不错,欢迎多多互三分享交流,一起学习进步!
也欢迎关注我的blog主页:落羽的落羽

文章目录
- 一、位图
- 1. 概念与实现
- 2. std::bitset
- 二、布隆过滤器
- 1. 概念
- 2. 布隆过滤器误判率数学推导
- 3. 实现
一、位图
1. 概念与实现
在许多公司的面试题中会考到这样的场景:给40亿个不重复无符号整数,如何快速判断一个数是否在这40亿数中。
如果使用常规思路,每次查询暴力遍历O(N)太慢,排序+二分查找O(NlogN)+O(logN),内存不足以放下这些数据。
数据是否在给定的整型数据中,结果是在或不在,正好是两种状态,那么可以用一个二进制比特位来代表数据是否存在的信息,比特位为1代表存在,比特位为0代表不在。那么,我们可以设计一个用比特位表示数据是否存在的数据结构——位图!

位图本质上是一个直接定址法的哈希表,每个整型值映射到一个比特位,位图提供控制这个比特位的相关接口,最主要的是set、reset、test:
namespace lydly
{
template<size_t N> // 模版参数表示有多少个数据
class bitset
{
public:
bitset()
{
// 一个int有32位,+1为了向上取整,初始全用0填充
_bits.resize(N / 32 + 1, 0);
}
void set(size_t x) // 将一个数的映射位设为1
{
// i找这个数在第几个int
// j找这个数在这个int中的第几个位
// 利用或运算将这一位设为1,不改变其他位
size_t i = x / 32;
size_t j = x % 32;
_bits[i] |= (1 << j);
}
void reset(size_t x) // 将一个数的映射位设为0
{
// i找这个数在第几个int
// j找这个数在这个int中的第几个位
// 利用且运算将这一位设为0,不改变其他位
size_t i = x / 32;
size_t j = x % 32;
_bits[i] &= ~(1 << j);
}
bool test(size_t x) // 如果x映射1返回true,映射0返回false
{
size_t i = x / 32;
size_t j = x % 32;
return _bits[i] & (1 << j);
}
private:
vector<int> _bits; // 位图与数组中是什么类型无关,我们使用它的位
};
}简单测试一下:
开232个比特位不在话下
#include"bitset.h"
int main()
{
lydly::bitset<0xffffffff> bs; // 开2^32位
for (size_t i = 0; i < 5000; i++)
{
bs.set(i);
}
for (int i = 0; i < 100; i++)
{
int n = rand() % 10000;
if (bs.test(n))
{
cout << n << "存在" << endl;
}
else
{
cout << n << "不存在" << endl;
}
}
return 0;
}
有了位图这样的数据结构,解决上面的问题就很轻松了。40亿个无符号整数,数的范围是0~232,所以要给位图开232个位。然后从文件中依次读取每个数存放到位图中,之后的每次查询,就可以达到O(1)的速度了。
2. std::bitset
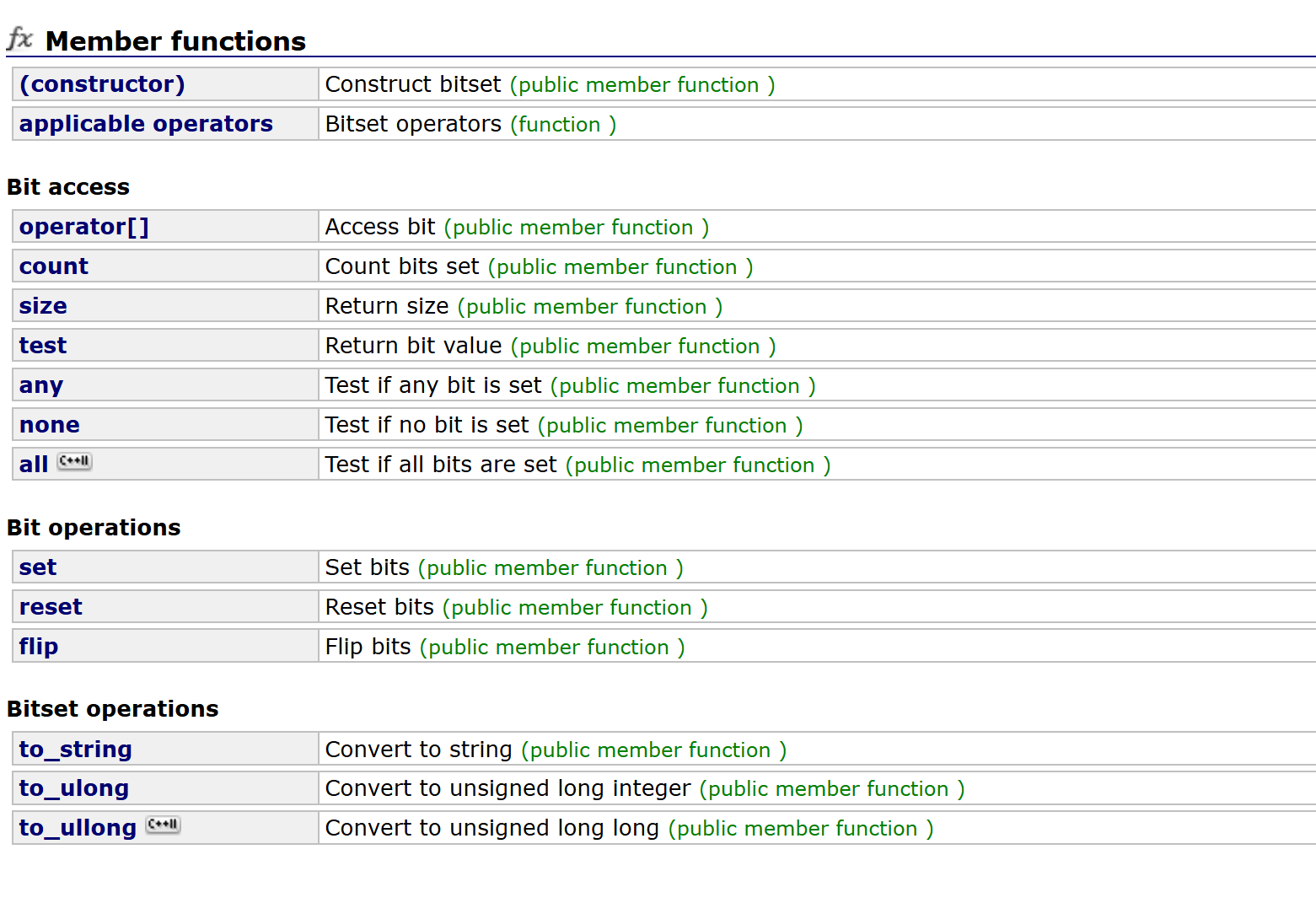
实际上,C++库中已经提供了位图bitset,核心接口还是set、reset、test等。还有一些其他功能,如operator[]允许我们像数组一样用下标控制位,to_string可以将位图转化为一个01字符串。

位图的优点是增删查改的效率很高,节省空间。缺点是他只适用于整型数据。
二、布隆过滤器
1. 概念
在一些场景下,有海量数据需要查询判断是否存在,但这些数据不是整型,那么就无法使用位图了,红黑树、哈希表这些内存空间不足。这种场景下就可以使用布隆过滤器。
布隆过滤器是由布隆提出的一种概率型数据结构,特点是可以高效插入和查询,很难进行删除,它可以查询某个数据“可能在”或“一定不在”,其思路是利用哈希函数将一个非整型数据映射为整型,再映射到比特位中。这种方式不仅可以提升查询效率,也能节省大量内存。
但是,只用一个哈希函数映射到一个位时,很容易造成哈希冲突,为了降低哈希冲突,一般会通过使用多个哈希函数,映射到多个位上,共同表示数据是否存在,这些位都为1才表示这个数据存在。布隆过滤器和哈希桶不一样,它始终无法解决哈希冲突,只能尽可能降低冲突率。因此,用布隆过滤器判断一个数据是否存在,不是完全准确的!判断一个数据不存在,是准确的!

2. 布隆过滤器误判率数学推导
布隆过滤器的数学推导过程比较复杂:
假设变量:
- m m m:布隆过滤器的bit长度
- n n n:插入布隆过滤器的元素个数
- k k k:哈希函数的个数
概率推导:
布隆过滤器哈希函数条件下某个位设置为1的概率: 1 m \frac{1}{m} m1
布隆过滤器哈希函数条件下某个位设置不为1的概率: 1 − 1 m 1 - \frac{1}{m} 1−m1
经过 k k k次哈希后,某个位置依旧不为1的概率: ( 1 − 1 m ) k (1 - \frac{1}{m})^k (1−m1)k
根据极限公式: lim n → ∞ ( 1 − 1 m ) − m = e \lim_{n \to \infty}(1 - \frac{1}{m})^{-m} = e limn→∞(1−m1)−m=e
推导出:
( 1 − 1 m ) k = ( ( 1 − 1 m ) m ) k m ≈ e − k m (1 - \frac{1}{m})^k = ((1 - \frac{1}{m})^m)^\frac{k}{m} \approx e^{-\frac{k}{m}} (1−m1)k=((1−m1)m)mk≈e−mk添加 n n n个元素某个位置不置为1的概率: ( 1 − 1 m ) k n ≈ e − k n m (1 - \frac{1}{m})^{kn} \approx e^{-\frac{kn}{m}} (1−m1)kn≈e−mkn
添加 n n n个元素某个位置置为1的概率: 1 − ( 1 − 1 m ) k n ≈ 1 − e − k n m 1 - (1 - \frac{1}{m})^{kn} \approx 1 - e^{-\frac{kn}{m}} 1−(1−m1)kn≈1−e−mkn
查询一个元素, k k k次hash后误判的概率(都命中1的概率): ( 1 − ( 1 − 1 m ) k n ) k ≈ ( 1 − e − k n m ) k (1 - (1 - \frac{1}{m})^{kn})^k \approx (1 - e^{-\frac{kn}{m}})^k (1−(1−m1)kn)k≈(1−e−mkn)k
结论:
布隆过滤器的误判率为:
f ( k ) = ( 1 − e − k n m ) k f(k) = (1 - e^{-\frac{kn}{m}})^k f(k)=(1−e−mkn)k
也可表示为:
f ( k ) = ( 1 − 1 e k n m ) k f(k) = (1 - \frac{1}{e^\frac{kn}{m}})^k f(k)=(1−emkn1)k误判率变化规律:在 k k k一定的情况下, n n n增加时误判率增加, m m m增加时误判率减少。
最优哈希函数个数:在 m m m和 n n n一定时,对误判率公式求导,可得 k = m n ln 2 k = \frac{m}{n} \ln2 k=nmln2时误判率最低。
期望的误判率 p p p和插入数据个数 n n n确定时,再把上面的公式带入误判率公式可得到布隆过滤器bit长度:
m = − n ∗ ln p ( ln 2 ) 2 m = -\frac{n * \ln p}{(\ln2)^2} m=−(ln2)2n∗lnp
3. 实现
我们要给布隆过滤器多个哈希函数算法,可以借鉴前人创造的一些算法:
struct HashFuncBKDR
{
/* 本算法由于在Brian Kernighan与Dennis Ritchie的《The CProgramming Language》
一书被展示而得名,是一种简单快捷的hash算法,也是Java目前采用的字符串的Hash算法,累乘因子为31*/
size_t operator()(const std::string& s)
{
size_t hash = 0;
for (auto ch : s)
{
hash *= 31;
hash += ch;
}
return hash;
}
};
struct HashFuncAP
{
// 由Arash Partow发明的一种hash算法。
size_t operator()(const std::string& s)
{
size_t hash = 0;
for (size_t i = 0; i < s.size(); i++)
{
if ((i & 1) == 0)
{
hash ^= ((hash << 7) ^ (s[i]) ^ (hash >> 3));
}
else
{
hash ^= (~((hash << 11) ^ (s[i]) ^ (hash >> 5)));
}
}
return hash;
}
};
struct HashFuncDJB
{
// 由Daniel J. Bernstein教授发明的一种hash算法。
size_t operator()(const std::string& s)
{
size_t hash = 5381;
for (auto ch : s)
{
hash = hash * 33 ^ ch;
}
return hash;
}
};布隆过滤器的实现:
#include"bitset.h"
#include<string>
struct HashFuncBKDR
{
/* 本算法由于在Brian Kernighan与Dennis Ritchie的《The CProgramming Language》
一书被展示而得名,是一种简单快捷的hash算法,也是Java目前采用的字符串的Hash算法,累乘因子为31*/
size_t operator()(const std::string& s)
{
size_t hash = 0;
for (auto ch : s)
{
hash *= 31;
hash += ch;
}
return hash;
}
};
struct HashFuncAP
{
// 由Arash Partow发明的一种hash算法。
size_t operator()(const std::string& s)
{
size_t hash = 0;
for (size_t i = 0; i < s.size(); i++)
{
if ((i & 1) == 0)
{
hash ^= ((hash << 7) ^ (s[i]) ^ (hash >> 3));
}
else
{
hash ^= (~((hash << 11) ^ (s[i]) ^ (hash >> 5)));
}
}
return hash;
}
};
struct HashFuncDJB
{
// 由Daniel J. Bernstein教授发明的一种hash算法。
size_t operator()(const std::string& s)
{
size_t hash = 5381;
for (auto ch : s)
{
hash = hash * 33 ^ ch;
}
return hash;
}
};
template<size_t N, // 数据个数
size_t X = 5, // 每个数据占用的平均bit位数(默认5)
class K = std::string, // 数据类型,默认设为string
class Hash1 = HashFuncBKDR, // 哈希函数个数k = m/n*ln2时误判率最低,这里计算约为3,所以给出三个不同的哈希函数
class Hash2 = HashFuncAP,
class Hash3 = HashFuncDJB>
class BloomFilter
{
public:
// 将一个数据映射的每个位设为1
void set(const K& key)
{
size_t hash1 = Hash1()(key) % M;
size_t hash2 = Hash2()(key) % M;
size_t hash3 = Hash3()(key) % M;
_bs.set(hash1);
_bs.set(hash2);
_bs.set(hash3);
}
// 判断一个数据是否存在,要判断映射的每一位是否都为1
// 返回true不一定准确,因为这一位1可能是别人的1
// 返回false一定准确,因为这一位是0,数据一定不存在
bool test(const K& key)
{
size_t hash1 = Hash1()(key) % M;
if (!_bs.test(hash1))
{
return false;
}
size_t hash2 = Hash2()(key) % M;
if (!_bs.test(hash2))
{
return false;
}
size_t hash3 = Hash3()(key) % M;
if (!_bs.test(hash3))
{
return false;
}
return true; // 可能存在误判
}
private:
static const size_t M = N * X;
lydly::bitset<M> _bs;
};简单测试一下:
#include"BloomFilter.h"
int main()
{
BloomFilter<100> bf;
// 生成"test1"、"test2"、..."test99"字符串,插入bf中
for (int i = 0; i < 100; i++)
{
std::string s("test");
s += std::to_string(i);
bf.set(s);
}
// 测试判断确定存在的数据
for (int i = 0; i < 100; i++)
{
std::string s("test");
s += std::to_string(i);
if (bf.test(s))
{
cout << s << "存在" << endl;
}
else
{
cout << s << "不存在" << endl;
}
}
// 测试判断不存在的数据,生成"test1000"、...、"test1500"字符串
for (int i = 1000; i < 1500; i++)
{
std::string s("test");
s += std::to_string(i);
if (bf.test(s))
{
cout << s << "存在" << endl;
}
else
{
cout << s << "不存在" << endl;
}
}
return 0;
}第一段测试没问题,这些字符串都是存在的:
而到了后面,就发现出现了误判,个别字符串不存在,但是判断成了存在:

布隆过滤器的优点是,效率高,节省空间,相比于位图可以适用于记录各种类型的数据。
缺点很明显,存在误判的情况,不是完全准确的。而且布隆过滤器不好支持删除,删除一个数据,不能直接将它的所有位设为0,因为可能还有别的数据映射到了这个位,具体分析十分复杂。
本篇完,感谢阅读!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号