

详细介绍:多尺度与细节增强的Segment Anything模型用于显著目标检测
摘要
显著目标检测(SOD)旨在识别和分割图像中最突出的目标。先进的SOD方法通常利用各种卷积神经网络(CNN)或Transformer进行深度特征提取。然而,这些手段在困难情况下仍然表现不佳且泛化能力差。最近,Segment Anything Model(SAM)作为一种视觉基础模型被提出,具有强大的分割和泛化能力。尽管如此,SAM需要目标对象的精确提示,这在SOD中是不可用的。此外,SAM缺乏对多尺度和多级信息的利用,以及对细粒度细节的整合。为了解决这些缺点,我们提出了一个用于SOD的多尺度和细节增强SAM(MDSAM)。具体而言,我们开始引入了一个轻量级多尺度适配器(LMSA),它允许SAM以极少的可训练参数学习多尺度信息。然后,我们提出了一个多级融合模块(MLFM),以全面利用SAM编码器的多级信息。最后,我们提出了一个细节增强模块(DEM),将SAM与细粒度细节相结合。实验结果证明了我们的模型在多个SOD数据集上的卓越性能及其在其他分割任务上的强大泛化能力。源代码发布在https://github.com/BellyBeauty/MDSAM
关键词
显著目标检测,Segment Anything模型,多尺度特征提取,目标细节增强
1 引言
显著目标检测(SOD)旨在识别和分割图像中最突出的目标。作为一项基础任务,SOD在许多下游任务中发挥着重要作用,如目标跟踪[68, 5]、场景分割[51, 6]、行人重识别[13, 41]等。在过去十年中,卷积神经网络(CNN)在SOD领域取得了巨大进展。然而,SOD需要全局上下文信息,这对于CNN来说由于其有限的感受野而具有挑战性。幸运的是,由于自注意力的全局感知能力,Vision Transformer(ViT)[8]极大地促进了SOD的发展。然而,由于训练样本不足和域差距大,这些SOD方式在复杂情况下仍然表现不佳且泛化能力差。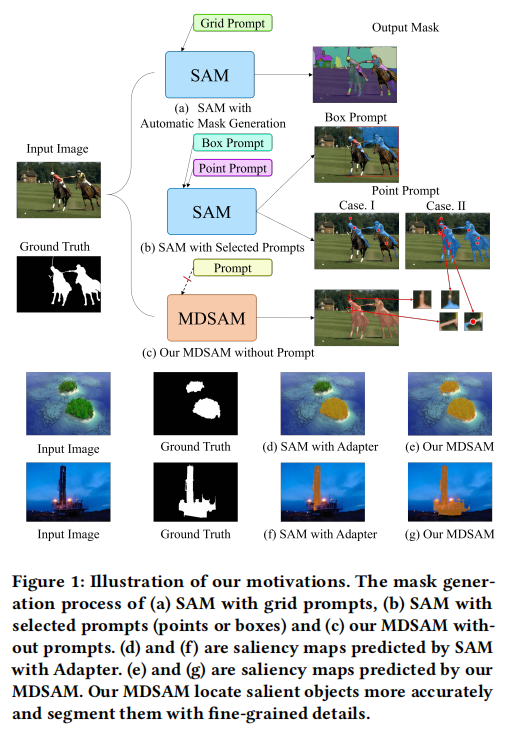
将SAM适应到SOD的直接方法。然而,它可能导致巨大的训练参数,甚至导致性能下降。先前的工作已经运用适配器[18]将这些基础模型迁移到下游任务。尽管如此,如图1(d)所示,使用适配器训练的SAM在多尺度场景中表现不佳。此外,SAM仅使用图像编码器末尾的特征,导致低级信息的丢失。如图1(d)和(f)所示,由于缺乏多尺度信息和细粒度细节,SAM会遇到不完整的对象掩码和不准确的对象边缘。就是最近,一个名为Segment Anything Model(SAM)[23]的视觉基础模型被提出用于通用图像分割。SAM受益于超过10亿个训练样本,这使其在许多分割任务中具有强大的泛化能力[4, 35, 42, 60, 72]。然而,为了实现鲁棒的分割,SAM需要手工设计的提示,如点、框或对应于感兴趣对象的粗略掩码。如图1(a)所示,采用网格提示的SAM能够自动生成目标掩码。然而,这些掩码是类别无关的,无法识别显著目标。如图1(b)所示,点提示需要准确的数量和关键点的位置。因此,即使有轻微的差异也会导致错误的结果。同时,框提示在几个具有挑战性的场景中可能无效,如目标遮挡。因此,将SAM适应到SOD需要为显著目标精心选择提示。这对于SOD来说是不合适的,缘于在推理过程中真实标签是不可用的。事实上,完全微调
为了解决上述问题,我们提出了一种名为多尺度和细节增强SAM(MDSAM)的新框架,用于高性能SOD。功能上,它通过多尺度和细节增强信息将SAM适应到SOD任务。具体来说,我们起初提出了一个轻量级多尺度适配器(LMSA),以非常少的参数将SAM适应到SOD,同时提取多尺度信息。随后,我们提出了一个多级融合模块(MLFM),以提取和融合SAM编码器不同级别的特征。最后,我们提出了一个细节增强模块(DEM),结合图像细节和边缘进行SOD预测,这有助于生成精确和详细的分割结果。大量实验表明,我们的模型不仅在SOD上表现良好,而且在其他分割任务上也表现出卓越的性能。
我们的首要贡献总结如下:
• 我们提出了一个名为多尺度和细节增强SAM(MDSAM)的新框架,用于高性能SOD。
• 我们提出了一个轻量级多尺度适配器(LMSA),以将SAM适应到SOD,同时保持训练效率和强大的泛化能力。
• 我们提出了多级融合模块(MLFM)和细节增强模块(DEM),分别提高SAM的多尺度和细粒度感知能力。
• 大家进行了大量实验,验证了我们的方法在多个SOD素材集和其他分割任务上的卓越有效性和强大泛化能力。
2 相关工作
2.1 显著目标检测
目前,SOD途径大致分为两类:基于CNN的方法和基于Transformer的方法。基于CNN的方法通常采用深度CNN,如VGGNet[43]、ResNet[15]作为骨干网络来提取和融合多尺度特征。例如,Zhang等人[70]提出聚合多级卷积特征进行SOD。Zhang等人[71]提出学习不确定卷积特征以完成准确的SOD。Wang等人[49]提出了一种分阶段优化CNN模型来检测图像中的显著目标。此外,Zhang等人[67]利用孪生CNN学习无损特征反射,用于结构感知的SOD。Wu等人[56]提出了一种级联部分解码器,用于快速准确的SOD。Zeng等人[64]提出了一种全局-局部CNN,融合深度特征进行高分辨率SOD。Wei等人[54]提出了一种融合-反馈-聚焦策略,以提高多级特征表示能力。Mohammadi等人[37]引入了内容感知引导用于SOD。Liu等人[29]提出了一种动态特征集成,用于同时检测显著目标、边缘和骨架。Zhao等人[74]提出了一种简单门控CNN,抑制无关特征并平衡SOD的信息。Pang等人[39]引入了一种多尺度交互网络,以提高特征效率和预测一致性。Wei等人[55]提出解耦SOD标签,以改善主体和细节感知。Wang等人[52]提出了一种多级增强SOD技巧,通过集成像素、区域和对象。
尽管这些办法在SOD方面取得了巨大进展,但它们仍然表现不令人满意。主要原因是CNN本质上缺乏全局感知能力,这对于SOD极其重要。
,它们在复杂情况下泛化能力较差。在这项工作中,大家借鉴了视觉基础模型的卓越特征提取和泛化能力,并将它们迁移到SOD任务中,以获得更好的性能。就是最近,由于自注意力的全局感知能力,ViT[8]在SOD任务中显示出卓越的有效性。为了利用ViT的优势,Liu等人[31]应用T2T-ViT[62]捕获长距离依赖关系并集成多级特征,以获得更好的SOD结果。Yun等人[63]提出了一种具有金字塔Transformer的自优化网络,以增强显著目标的全局语义和局部细节信息。Zhuge等人[78]利用Swin Transformer[32]提取多尺度特征并增强检测到的显著区域的完整性。Wang等人[53]结合多个Transformer学习局部-全局表示,用于基于涂鸦的RGB-D SOD。Deng等人[6]引入了一种递归多尺度Transformer,用于高分辨率SOD。尽管这些基于Transformer的途径表现令人印象深刻,但它们缺乏对目标细节的细粒度感知。更重要的
2.2 Segment Anything模型
最近,SAM[23]被提出作为一种视觉基础模型,用于通用图像分割。经过适当的修改,它在许多下游任务中表现非常出色[4, 35, 42, 60, 72]。然而,SAM需目标的精确提示,如点、框或掩码。这些提示对于SOD来说很难获得。一些工作已经对SAM进行了完全微调,以便将其迁移到SOD任务。然而,完全微调将导致过多的训练参数,甚至导致性能下降。同时,有些工作试图用少量可训练参数迁移SAM。例如,Cui等人[5]提出启用SAM的低秩适应(LoRA)进行SOD。Xu等人[58]引入了SAM的多维探索,用于弱监督SOD。Ke等人[22]设计了一种可学习的高质量输出令牌,它被注入到SAM的掩码解码器中,负责预测高质量掩码。尽管有效,但这些方式未能使SAM学习多尺度和多级信息。此外,SAM的简单解码器无法整合详细信息,导致分割不准确。为了处理这些问题,大家提出了LMSA,用非常少的训练参数将SAM迁移到SOD,并使SAM获得多尺度信息。此外,我们引入了轻量级模块,利用细粒度细节以获得更好的SOD性能。
3 我们提出的方法
在这项工作中,我们提出了一种新颖的多尺度和细节增强SAM(MDSAM)用于SOD任务。图2显现了整体架构,它为SAM配备了三个新颖模块:轻量级多尺度适配器(LMSA)、多级融合模块(MLFM)和细节增强模块(DEM)。我们将在以下部分中描述它们。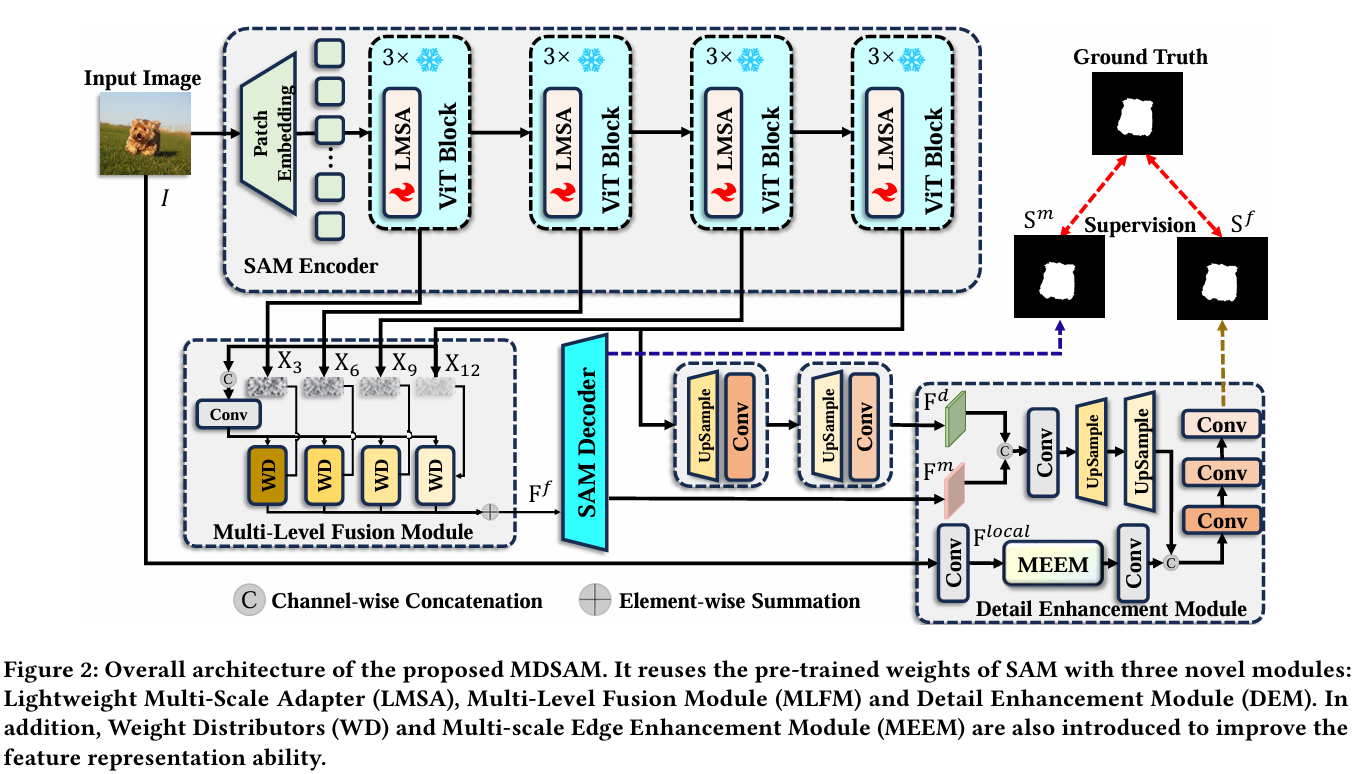
3.1 轻量级多尺度适配器
第一个将多尺度适配器应用于将SAM迁移到下游任务的。我们通过增强提取局部信息的能力进行了进一步改进。这样,我们的MDSAM重用并保留了SAM的预训练权重,同时以非常少的训练参数整合了多尺度信息。就是尽管SAM在许多分割任务中表现良好,但提供适当提示的挑战仍然限制了其在SOD中的直接应用。一个可能的解决方案是对SAM进行完全微调。然而,SAM编码器的过多可训练参数和不足的SOD数据可能导致不满意的表现。幸运的是,适配器[18]是一种有效的方法,可以用很少的训练参数将SAM适应到SOD。此外,多尺度信息对SOD非常有帮助。为此,我们提出了一个轻量级多尺度适配器(LMSA),将SAM适应到SOD。据我们所知,我们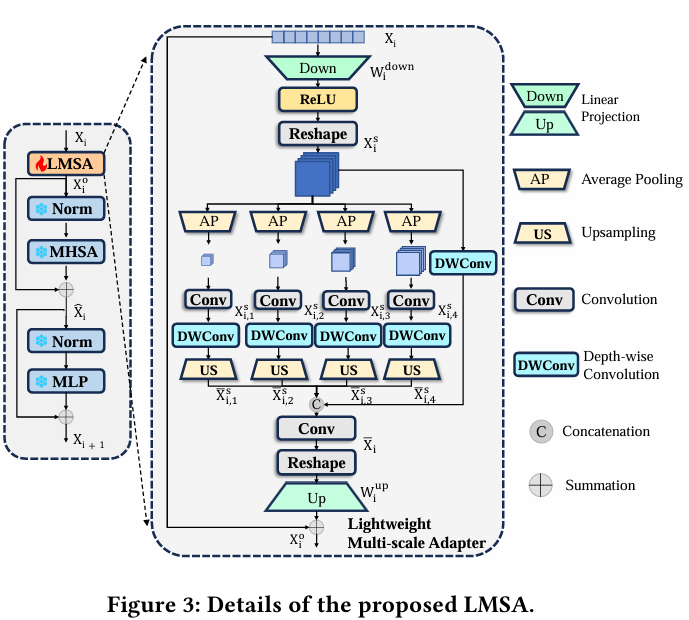
如图3所示,SAM编码器的每个Transformer层由多头自注意力(MHSA)[47]、多层感知机(MLP)和两个归一化层组成。它表示如下:
X^i=MHSA(LN(Xi))+Xi,Xi+1=MLP(LN(X^i))+X^i,\begin{aligned}&\hat{\mathbf{X}}_{i}=MHSA(LN(\mathbf{X}_{i}))+\mathbf{X}_{i},\\&\mathbf{X}_{i+1}=MLP(LN(\hat{\mathbf{X}}_{i}))+\hat{\mathbf{X}}_{i},\\ \end{aligned}X^i=MHSA(LN(Xi))+Xi,Xi+1=MLP(LN(X^i))+X^i,
其中Xi∈RN×D\mathbf{X}_{i}\in\mathbb{R}^{N\times D}Xi∈RN×D是第i个Transformer层的输出。N是令牌的数量。D是嵌入维度。X^i∈RN×D\hat{\mathbf{X}}_{i}\in\mathbb{R}^{N\times D}X^i∈RN×D是中间输出。LN表示层归一化(LN)[1]。为了将SAM适应到SOD,大家在每个Transformer层中的第一个归一化之前使用所提出的LMSA。
LMSA的详细结构如图3所示。具体来说,我们最初使用线性投影层来降低特征维度:
Xis=τ(ReLU(Widown(Xi))),\mathbf{X}_{i}^{s}=\tau(ReLU(\mathbf{W}_{i}^{down}(\mathbf{X}_{i}))),Xis=τ(ReLU(Widown(Xi))),
其中Widown∈RD×Dr\mathbf{W}_{i}^{down}\in\mathbb{R}^{D\times\frac{D}{r}}Widown∈RD×rD是线性投影层的参数。在ReLU激活函数之后,我们将特征重塑为Xis∈RDr×W×H\mathbf{X}_{i}^{s}\in\mathbb{R}^{\frac{D}{r}\times W\times H}Xis∈RrD×W×H,以便进一步进行空间信息处理。[⋅][\cdot][⋅]缩减因子。就是是重塑处理。r
然后,为了提高表示能力,大家使用四个平均池化(AP)层来获取多尺度特征Xi,js∈RD4×r×Wj×Hj\mathbf{X}_{i,j}^{s}\in\mathbb{R}^{\frac{D}{4\times r}\times W_{j}\times H_{j}}Xi,js∈R4×rD×Wj×Hj,并利用深度卷积层捕获局部细节信息:
Xi,js=ϕ1×1(AP(Xis)),1≤j≤4,\mathbf{X}_{i,j}^{s}=\phi_{1\times1}(AP(\mathbf{X}_{i}^{s})),1\leq j\leq4,Xi,js=ϕ1×1(AP(Xis)),1≤j≤4,
Xˉi,js=US(DWConv(Xi,js)),\bar{\mathbf{X}}_{i,j}^{s}=US(DWConv(\mathbf{X}_{i,j}^{s})),Xˉi,js=US(DWConv(Xi,js)),
其中ϕ1×1\phi_{1\times1}ϕ1×1定义了一个带有1×1核的卷积层,后跟GELU函数[16]。DWConv是一个带有3×3核和GELU函数的深度卷积层。US是双线性插值,用于将特征上采样到特定分辨率。
之后,我们将多尺度特征Xˉi,js∈RDr×W×H\bar{\mathbf{X}}_{i,j}^{s}\in\mathbb{R}^{\frac{D}{r}\times W\times H}Xˉi,js∈RrD×W×H与Xis\mathbf{X}_{i}^{s}Xis融合如下:
Xˉi=ϕ1×1([Xˉi,1s,Xˉi,2s,Xˉi,3s,Xˉi,4s,DWConv(Xis)]),\bar{\mathbf{X}}_{i}=\phi_{1\times1}([\bar{\mathbf{X}}_{i,1}^{s},\bar{\mathbf{X}}_{i,2}^{s},\bar{\mathbf{X}}_{i,3}^{s},\bar{\mathbf{X}}_{i,4}^{s},DWConv(\mathbf{X}_{i}^{s})]),Xˉi=ϕ1×1([Xˉi,1s,Xˉi,2s,Xˉi,3s,Xˉi,4s,DWConv(Xis)]),
其中Xˉi∈RDr×W×H\bar{\mathbf{X}}_{i}\in\mathbb{R}^{\frac{D}{r}\times W\times H}Xˉi∈RrD×W×H,[⋅][\cdot][⋅]是通道级联。
最后,大家将Xˉi\bar{\mathbf{X}}_{i}Xˉi重塑回令牌化特征。通过线性投影层和残差连接[15],我们获得LMSA的最终输出:
Xˉio=Wiup(τ(Xˉi))+Xi,\bar{\mathbf{X}}_{i}^{o}=\mathbf{W}_{i}^{up}\big(\tau\big(\bar{\mathbf{X}}_{i}\big)\big)+\mathbf{X}_{i},Xˉio=Wiup(τ(Xˉi))+Xi,
其中Wiup∈RDr×D\mathbf{W}_{i}^{up}\in\mathbb{R}^{\frac{D}{r}\times D}Wiup∈RrD×D是一个线性投影层,用于恢复特征维度。
通过LMSA,SAM允许以非常少的训练参数适应SOD任务。此外,与其他手段相比,我们的方式可以更好地利用多尺度信息,从而使模型学习更好的特征。
3.2 多级融合模块
在SAM编码器中,每一层囊括不同的信息。浅层囊括更多的低级细节信息,而深层包含更丰富的高级语义信息。在SOD任务中,仅依靠深层的高级信息可能无法在复杂情况下准确定位目标。因此,利用多级信息对SOD是必要的。然而,SAM仅使用编码器最后一层的输出作为掩码解码器的输入。此外,方便的级联融合策略无法充分整合来自不同层的多级信息[70]。为了解决这个问题,我们提出了一个多级融合模块(MLFM),以全面利用SAM编码器的多级信息。如图4所示,所提出的MLFM生成权重并将它们分配给不同层,使用权重分配器(WD)。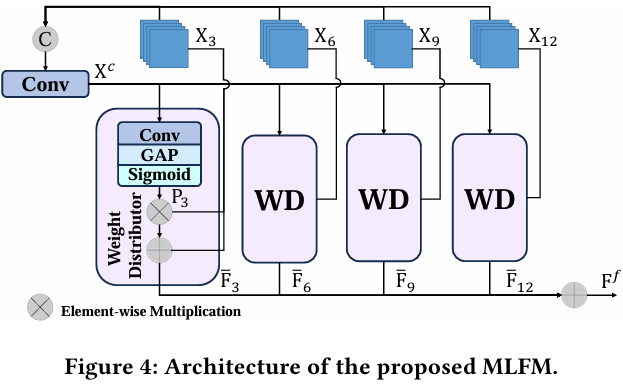
我们将SAM编码器中不同层的输出特征表示为Xq∈RD×H×W(q=3,6,9,12)\mathbf{X}_{q}\in\mathbb{R}^{D\times H\times W}(q=3,6,9,12)Xq∈RD×H×W(q=3,6,9,12)。首先,大家连接它们并通过卷积层获得聚合特征Xc\mathbf{X}^{c}Xc:
Xc=ϕ1×1([X3,X6,X9,X12]).\mathbf{X}^{c}=\phi_{1\times1}([\mathbf{X}_{3},\mathbf{X}_{6},\mathbf{X}_{9},\mathbf{X}_{12}]).Xc=ϕ1×1([X3,X6,X9,X12]).
随后,我们基于Xc\mathbf{X}^{c}Xc获得权重Pq\mathbf{P}_{q}Pq并将它们分配给不同层,如下所示:
Pq=δ(GAP(ϕ1×1(Xc))),Fˉq=Pq×Xq+Xq,\begin{array}{r l}&{\mathbf{P}_{q}=\delta(GAP(\phi_{1\times1}(\mathbf{X}^{c}))),}\\ &{\quad\bar{\mathbf{F}}_{q}=\mathbf{P}_{q}\times\mathbf{X}_{q}+\mathbf{X}_{q},}\end{array}Pq=δ(GAP(ϕ1×1(Xc))),Fˉq=Pq×Xq+Xq,
其中δ\deltaδ表示Sigmoid函数。GAP是全局平均池化(GAP)。最后,我们获得融合特征Ff∈RD×H×W\mathbf{F}^{f}\in\mathbb{R}^{D\times H\times W}Ff∈RD×H×W如下:
Ff=ΣqFˉq.\mathbf{F}^{f}=\Sigma_{q}\bar{\mathbf{F}}_{q}.Ff=ΣqFˉq.
经过MLFM后,Ff\mathbf{F}^{f}Ff将用作掩码解码器的图像嵌入。与原始SAM不同,我们提出的MLFM的输出特征充分融合了SAM编码器的多级信息。
3.3 细节增强模块
在LMSA和MLFM的协助下,我们的框架充分利用了多尺度和多级信息。这极大地援助了SAM在SOD任务中的应用。然而,仍然存在一些剩余障碍。一方面,SAM编码器采用图像块嵌入策略,不可避免地会丢失细节信息。另一方面,SAM解码器中的上采样策略无法恢复关键细节。因此,具有复杂细节和边缘的显著目标没有被充分捕获。为了解决这个问题,我们提出了一个细节增强模块(DEM),以增强细粒度细节,获得更好的SOD性能。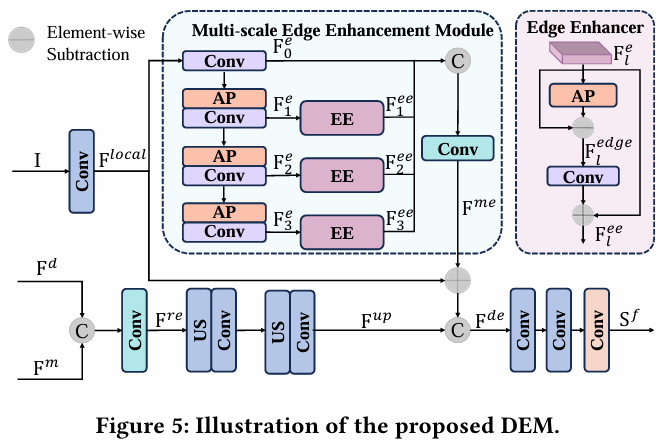
如图5所示,所提出的DEM包括主分支和辅助分支。主分支将掩码解码器的特征从输出逐步上采样到输入分辨率。辅助分支从输入图像中提取细粒度细节信息,并将其添加到主分支的特征中。然而,直接在输入分辨率下提取细节会导致计算量过大,减慢推理速度。因此,大家提出了一个多尺度边缘增强模块(MEEM)。在MEEM中,我们使用3×3平均池化和1×1卷积来提取细节信息。此外,我们利用边缘增强器(EE)来突出特征图中目标的边缘。
从技术上讲,在主分支中,大家最初连接掩码解码器特征Fm\mathbf{F}^{m}Fm和SAM编码器最后一层上采样后的特征Fd\mathbf{F}^{d}Fd。然后,我们使用1×1卷积层来减少通道维度。最后,我们应用多个双线性插值和3×3卷积将特征逐步上采样到输入分辨率:
Fre=ϕ1×1([Fd,Fm]),Fup=ϕ3×3(US×2(ϕ3×3(US×2(Fre))))\begin{array}{c}{\mathbf{F}^{re}=\phi_{1\times1}([\mathbf{F}^{d},\mathbf{F}^{m}]),}\\ {\mathbf{F}^{up}=\phi_{3\times3}(US_{\times2}(\phi_{3\times3}(US_{\times2}(\mathbf{F}^{re}))))}\end{array}Fre=ϕ1×1([Fd,Fm]),Fup=ϕ3×3(US×2(ϕ3×3(US×2(Fre))))
其中US×2US_{\times2}US×2是运用双线性插值的2倍上采样。ϕ3×3\phi_{3\times3}ϕ3×3包含一个带有3×3核的卷积层、批归一化和ReLU函数。
尽管Fup\mathbf{F}^{up}Fup可用于SOD预测,但它缺乏细节和边缘信息。因此,大家引入辅助分支并提出MEEM,从输入图像中整合细粒度细节。具体来说,给定输入图像I,我们首先应用3×3卷积层提取局部特征:
Flocal=ϕ3×3(I),\mathbf{F}^{local}=\phi_{3\times3}(\mathbf{I}),Flocal=ϕ3×3(I),
其中Flocal∈RC×H×W\mathbf{F}^{local}\in\mathbb{R}^{C\times H\times W}Flocal∈RC×H×W。通过所提出的MEEM,我们从图像中在多个尺度上提取边缘信息,并进一步增强显著目标的边缘感知。为了减少计算复杂度,我们使用平均池化来扩大感受野。MEEM的过程如下:
F0e=ϕ1×1(Flocal),\mathbf{F}_{0}^{e}=\phi_{1\times1}(\mathbf{F}^{local}),F0e=ϕ1×1(Flocal),
Ft+1e=AP(ϕ1×1′(Fte)),(0≤t≤2),\mathbf{F}_{t+1}^{e}=AP(\phi_{1\times1}^{\prime}(\mathbf{F}_{t}^{e})),(0\leq t\leq2),Ft+1e=AP(ϕ1×1′(Fte)),(0≤t≤2),
其中APAPAP表示带有3×3核的平均池化。ϕ1×1′\phi_{1\times1}^{\prime}ϕ1×1′表示一个带有批归一化和Sigmoid函数的1×1卷积层。Fte∈RC×H×W\mathbf{F}_{t}^{e}\in\mathbb{R}^{C\times H\times W}Fte∈RC×H×W是在尺度t的特征。然后,大家引入边缘增强器ψ\psiψ来增强每个尺度上的细节信息:
Flee=ψ(Fle),(1≤l≤3),\mathbf{F}_{l}^{ee}=\psi(\mathbf{F}_{l}^{e}),(1\leq l\leq3),Flee=ψ(Fle),(1≤l≤3),
其中Flee∈RC×H×W\mathbf{F}_{l}^{ee}\in\mathbb{R}^{C\times H\times W}Flee∈RC×H×W是边缘增强特征。边缘增强器的结构如图5右上部分所示,可以表示如下:
Fledge=Fle−AP(Fle),\mathbf{F}_{l}^{edge}=\mathbf{F}_{l}^{e}-AP(\mathbf{F}_{l}^{e}),Fledge=Fle−AP(Fle),
Flee=ϕ1×1′(Fledge)+Fle,\mathbf{F}_{l}^{ee}=\phi_{1\times1}^{\prime}(\mathbf{F}_{l}^{edge})+\mathbf{F}_{l}^{e},Flee=ϕ1×1′(Fledge)+Fle,
其中Fledge∈RC×H×W\mathbf{F}_{l}^{edge}\in\mathbb{R}^{C\times H\times W}Fledge∈RC×H×W。之后,我们通过通道级联和1×1卷积层融合这些特征:
Fme=ϕ1×1([F0e,F1ee,F2ee,F3ee]),\mathbf{F}^{me}=\phi_{1\times1}([\mathbf{F}_{0}^{e},\mathbf{F}_{1}^{ee},\mathbf{F}_{2}^{ee},\mathbf{F}_{3}^{ee}]),Fme=ϕ1×1([F0e,F1ee,F2ee,F3ee]),
其中Fme∈RC×H×W\mathbf{F}^{me}\in\mathbb{R}^{C\times H\times W}Fme∈RC×H×W是MEEM的输出特征。这样,Fme\mathbf{F}^{me}Fme既包含细粒度细节,也具备多尺度边缘信息。我们使用这些特征来补充Fc\mathbf{F}^{c}Fc中缺失的信息。经过级联后,我们应用两个3×3卷积层和一个1×1卷积层来获得最终的SOD结果Sf\mathbf{S}^{f}Sf:
Fde=[Fup,Fme+Flocal],\mathbf{F}^{de}=[\mathbf{F}^{up},\mathbf{F}^{me}+\mathbf{F}^{local}],Fde=[Fup,Fme+Flocal],
Sf=ϕ1×1(ϕ3×3(ϕ3×3(Fde))).\begin{array}{r}{\mathbf{S}^{f}=\phi_{1\times1}(\phi_{3\times3}(\phi_{3\times3}(\mathbf{F}^{de}))).}\end{array}Sf=ϕ1×1(ϕ3×3(ϕ3×3(Fde))).
可以看出,在MEEM的协助下,我们的DEM可以从输入图像中提取多尺度边缘,并将它们与主分支结合。借助利用两个分支,SAM中缺乏细节的问题得到了解决。因此,我们的MDSAM能够奏效地定位具有丰富细节信息的显著目标。
3.4 损失函数
为了训练大家的框架,我们引入了二元交叉熵(BCE)损失、交并比(IoU)损失和L1损失。为了提高学习能力,我们将其应用于Sf\mathbf{S}^{f}Sf和Sm=ϕ1×1(Fm)\mathbf{S}^{m}=\phi_{1\times1}(\mathbf{F}^{m})Sm=ϕ1×1(Fm)。MDSAM的总损失公式如下:
L(S,Sgt)=LBCE+LIoU+LL1,\mathcal{L}(\mathbf{S},\mathbf{S}^{gt})=\mathcal{L}_{BCE}+\mathcal{L}_{IoU}+\mathcal{L}_{L1},L(S,Sgt)=LBCE+LIoU+LL1,
Ltotal=Lf(Sf,Sgt)+Lm(Sm,Sgt),\mathcal{L}_{total}=\mathcal{L}_{f}(\mathbf{S}^{f},\mathbf{S}^{gt})+\mathcal{L}_{m}(\mathbf{S}^{m},\mathbf{S}^{gt}),Ltotal=Lf(Sf,Sgt)+Lm(Sm,Sgt),
其中Sgt\mathbf{S}^{gt}Sgt是显著目标的真实标签。
4 实验
4.1 实验设置
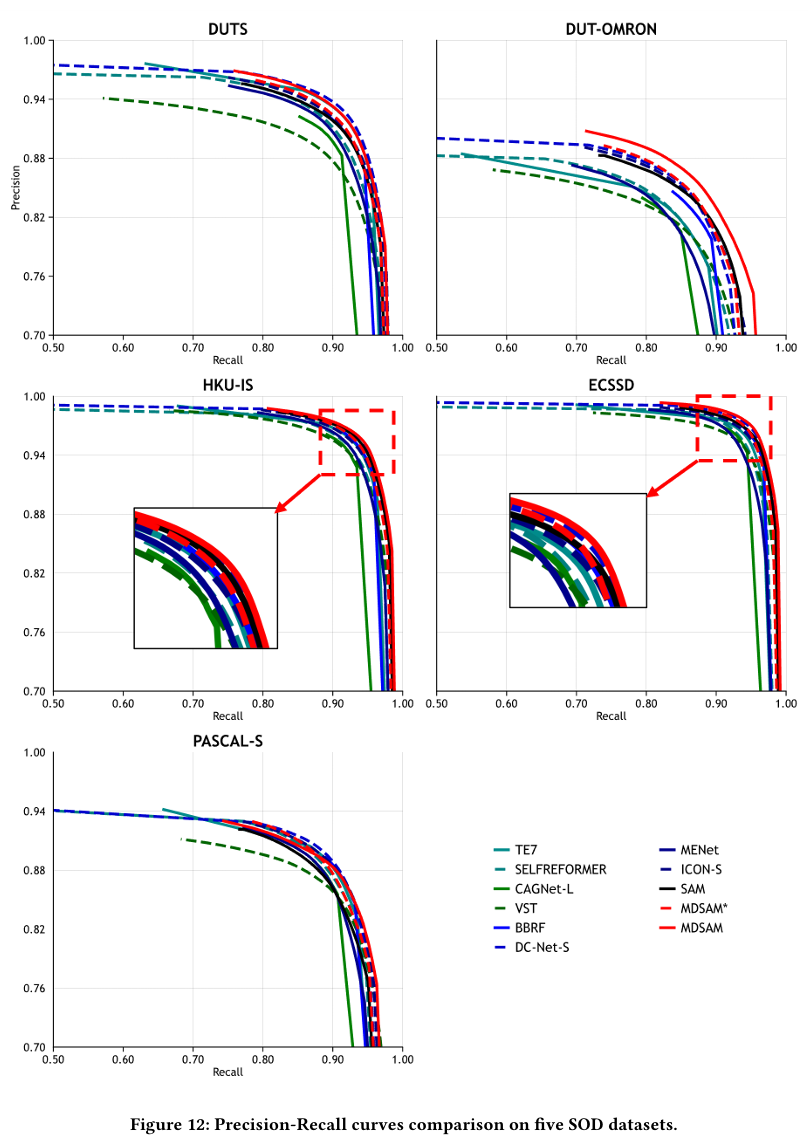
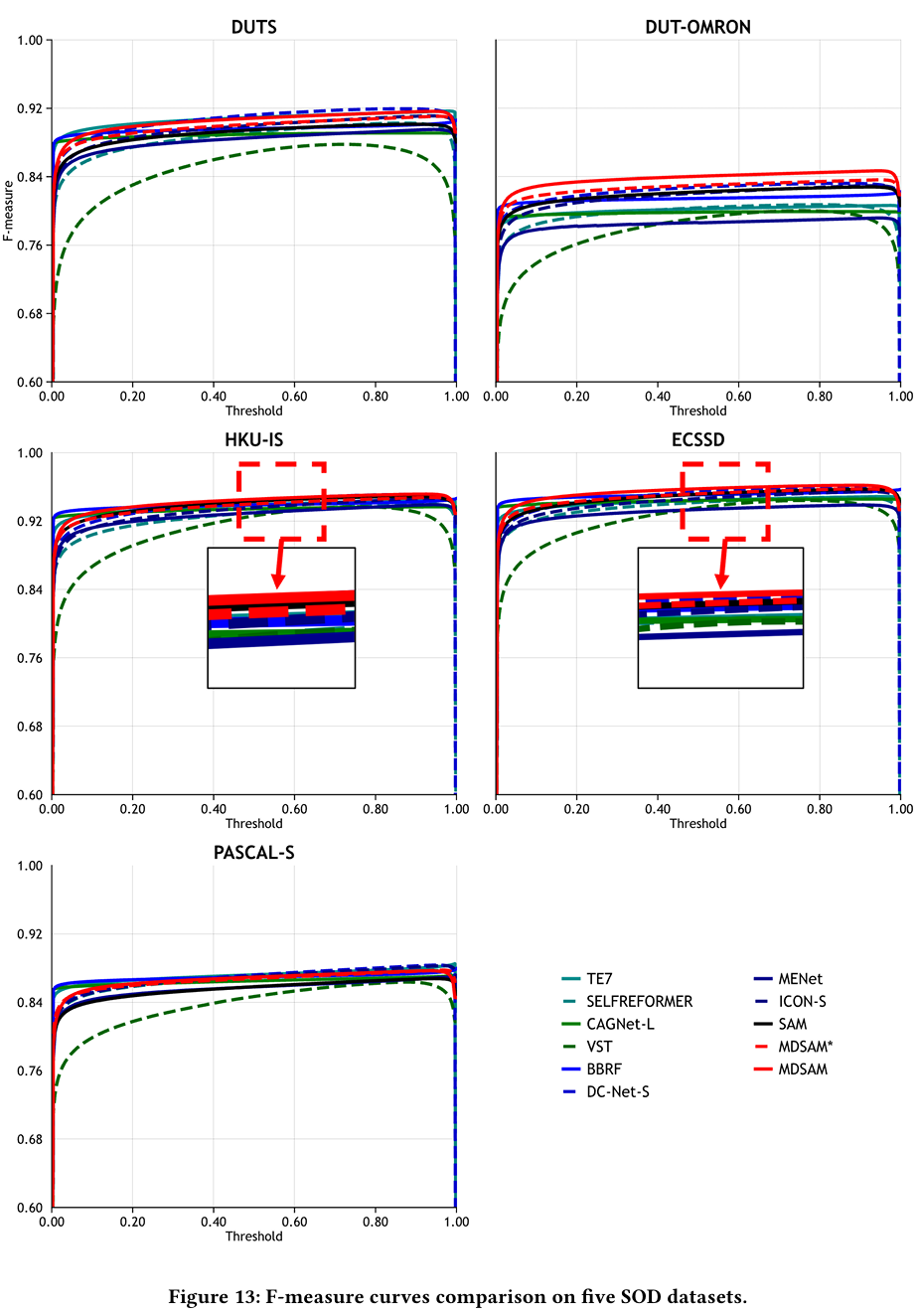
数据集。为了公平比较,我们在DUTS-TR[48](10533张图像)上训练我们提出的MDSAM,并在五个SOD基准数据集上评估它,包括DUTS-TE[48](5019张图像)、DUTS-OMRON[61](5168张图像)、HKU-IS[26](4447张图像)、ECSSD[59](1000张图像)和PASCAL-S[28](850张图像)。
评估指标。按照先前的工作,我们采用四个广泛使用的指标来评估SOD性能,即平均绝对误差(MAE)[40]、最大F-measure(Fβmax)(F_{\beta}^{max})(Fβmax)[61]、S-measure(Sm)(S_{m})(Sm)[9]和平均增强对齐度量(Em)(E_{m})(Em)[10]。
实现细节。我们使用PyTorch工具箱在NVIDIA A100 GPU上实现我们的办法。对于初始化,我们从SAM-B模型加载图像编码器和掩码解码器的权重。我们提出的MDSAM的其余部分随机初始化。我们将图像调整为512×512和384×384作为输入,并将批量大小分别设置为16和32。我们使用AdamW优化器进行训练,权重衰减为1e−41e^{-4}1e−4。在训练期间,我们冻结SAM的编码器,并将学习率设置为5e−55e^{-5}5e−5用于其余预训练权重。对于我们提出的模块,我们将学习率设置为5e−45e^{-4}5e−4。大家采用5个epoch的预热期,并训练到最大80个epoch。
4.2 与最先进方法的比较
我们将我们提出的MDSAM与15个其他模型进行比较,包括CPD[56]、F3Net[54]、CAGNet[37]、DFI[29]、GateNet[74]、MINet[39]、LDF[55]、ICON[78]、TE[25]、MENet[52]、VST[31]、SelfReformer[63]、DC-Net[77]、BBRF[36]、SAM[23]。注意,SAM保持原始结构并为SOD进行完全微调。为了公平比较,显著图要么由作者提供,要么由他们发布的预训练模型生成。所有指标都使用相同的工具计算。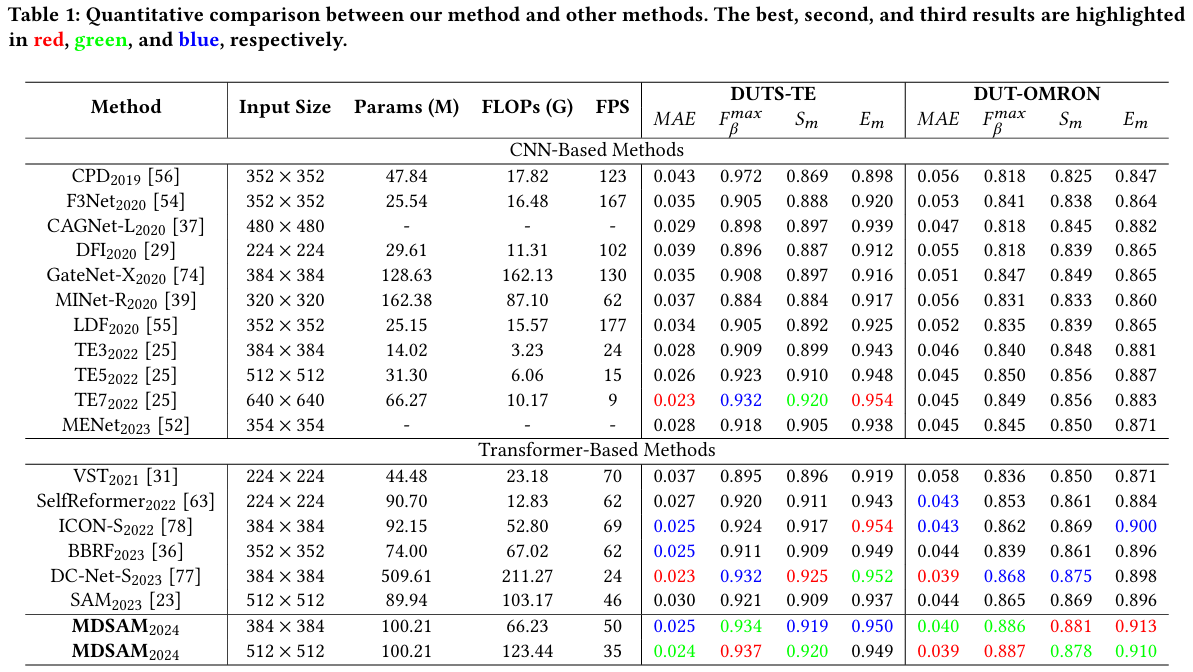
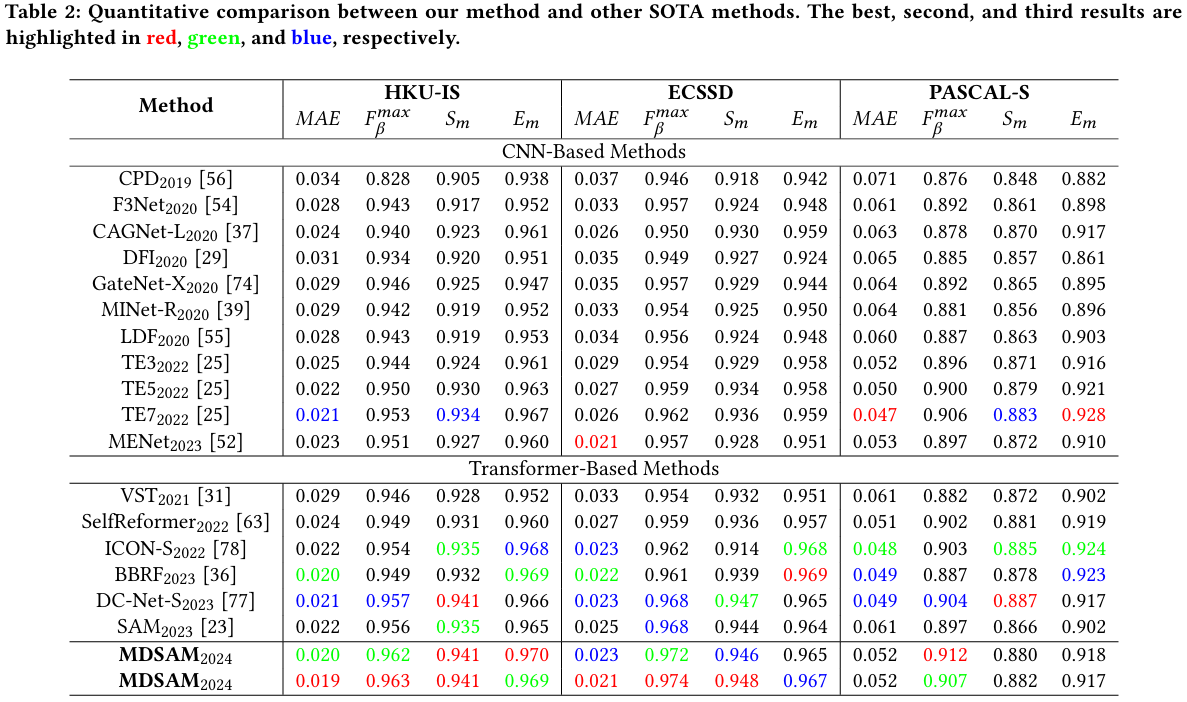
定量评估。表1和表2显示了比较方式的定量结果。我们提出的输入分辨率为512×512的MDSAM在DUTS-OMRON、HKU-IS和ECSSD上取得了最佳结果。此外,我们的MDSAM在DUTS上也表现出高度竞争力。尽管我们的MDSAM在PASCAL-S数据集上表现较差,但它获得了最佳的总体结果。在384×384输入分辨率下,我们的MDSAM在相似分辨率下获得了最佳的总体性能。在表1和表2中,SAM在512×512分辨率下进行完全微调。可以观察到,与原始SAM相比,我们的MDSAM显著提高了性能,同时略微增加了模型参数。在相同分辨率下,我们的MDSAM的推理速度仅略有下降。此外,当我们的MDSAM以384×384分辨率推理时,它在推理速度和准确性方面都优于512×512分辨率的SAM。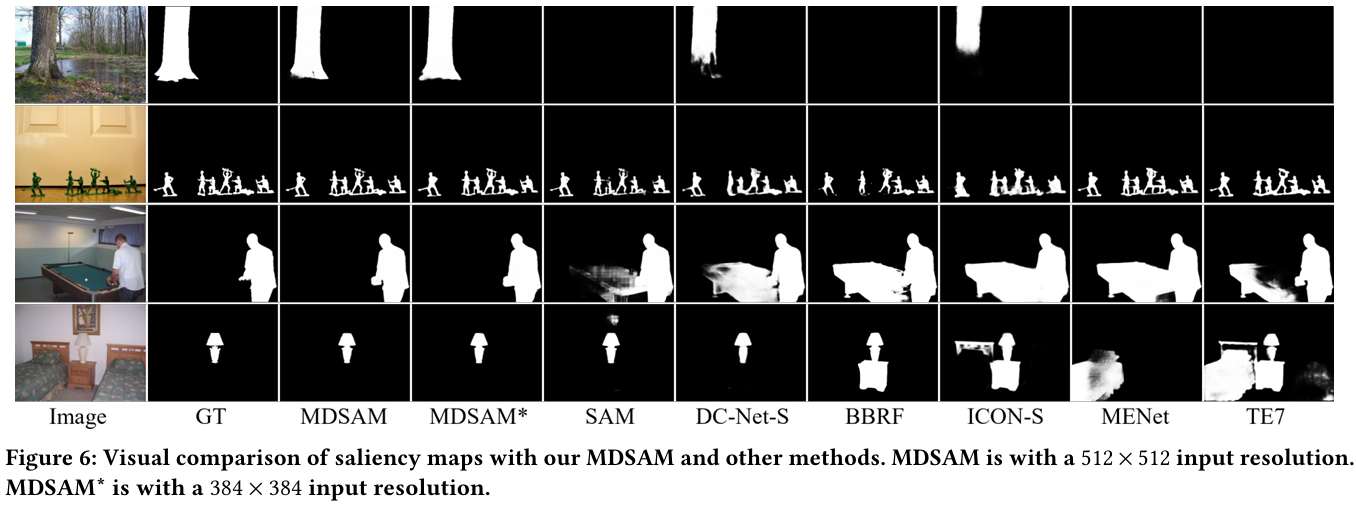
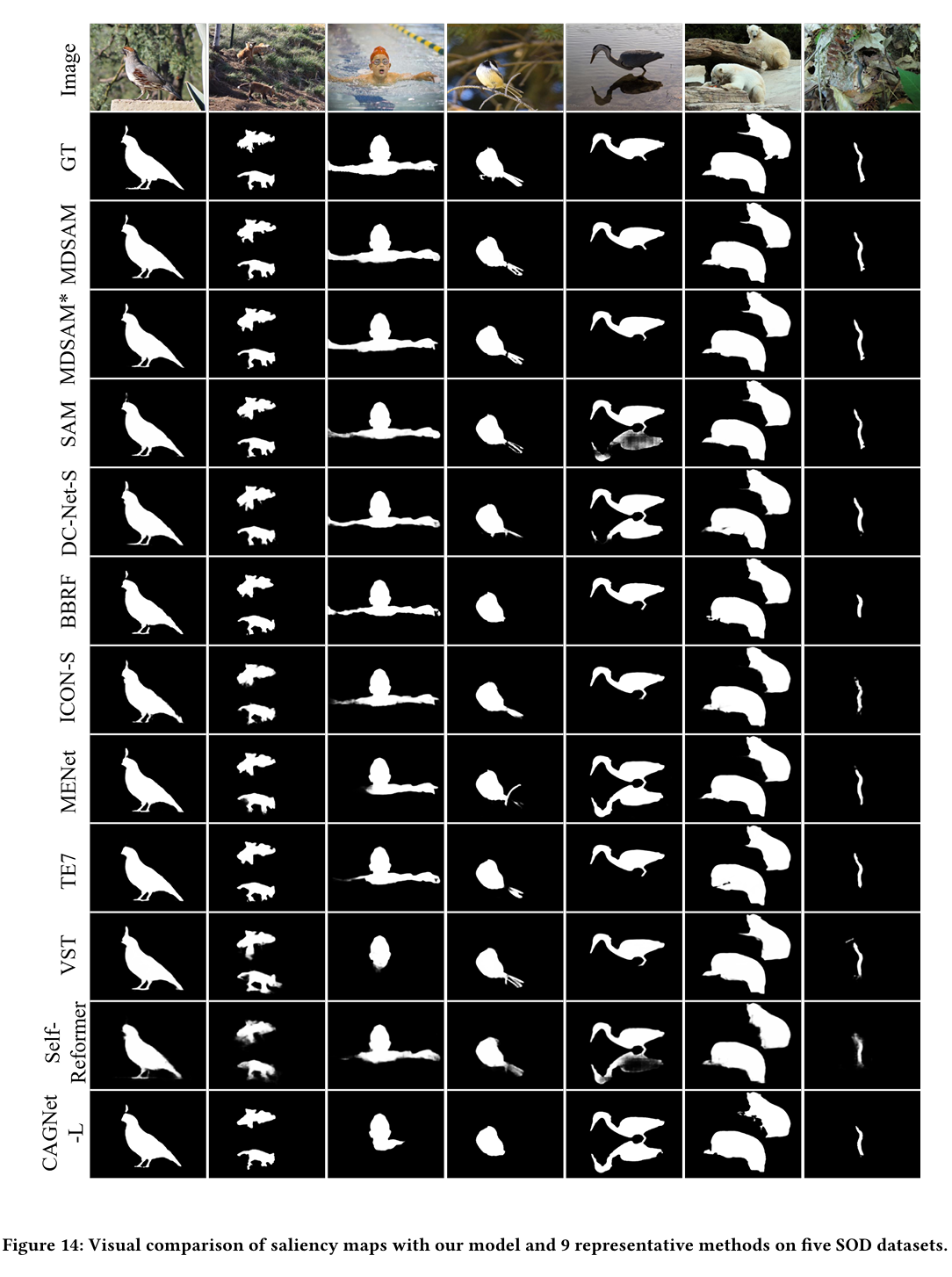
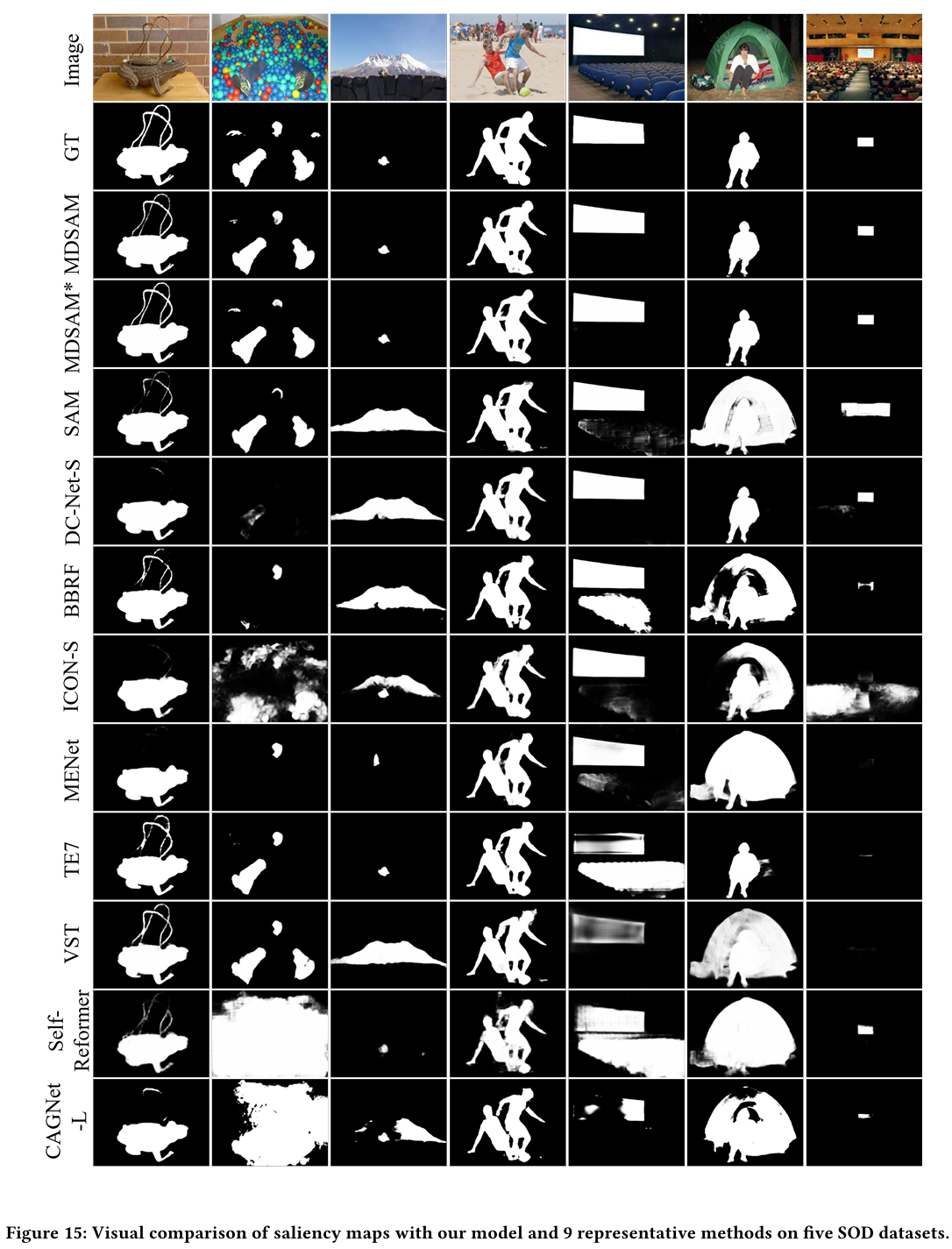
定性评估。图6展示了我们MDSAM与其他方法预测的显著图。在繁琐场景中,我们的MDSAM行准确定位各种大小的显著目标,并完全识别这些目标的形状。此外,我们提出的MDSAM的结果比其他方法显现更多细粒度细节和准确边缘。更多视觉示例允许在附录中找到。
4.3 消融研究
为了验证大家提出模块的有效性,我们在本节中进行消融研究。如果未指定,所有结果都是在512×512图像分辨率下获得的。
LMSA的有效性。为了验证LMSA的效果,大家只改变SAM的图像编码器。除了完全微调(FT)之外,我们将适配器[18]和LoRA[19]引入图像编码器,将SAM适应到SOD。此外,我们保持适配器、LoRA的参数与我们的LMSA相似,以进行公平比较。如表3所示,引入参数高效微调许可显著减少可训练参数并提高性能。此外,我们的LMSA与适配器和LoRA具有相似的参数。然而,它比它们表现出更好的结果。图8中的视觉比较进一步说明,LMSA的利用使模型能够获取多尺度信息。因此,它可以在复杂场景中准确定位不同大小和数量的显著目标。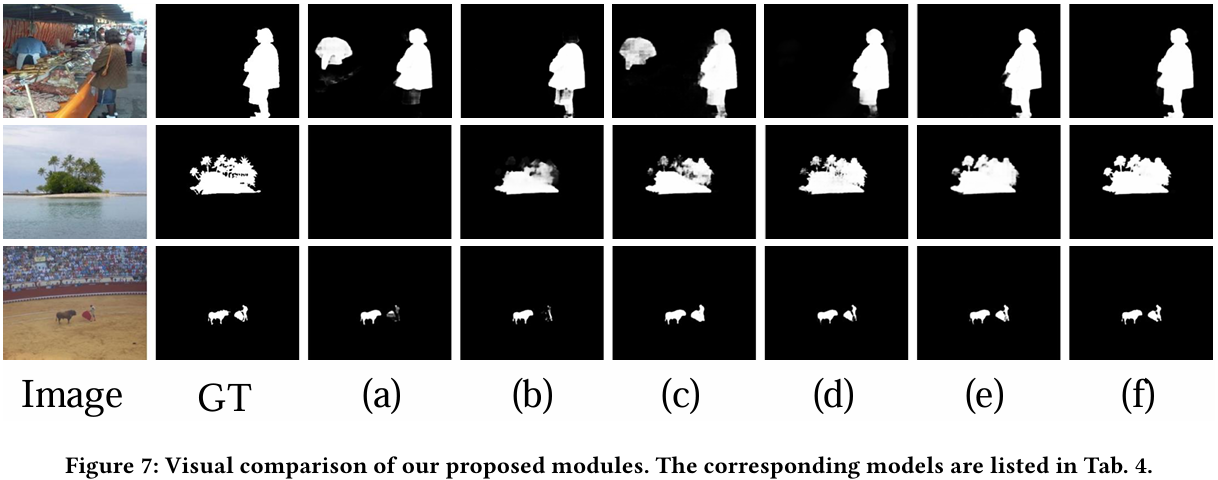
MLFM的有效性。表4显示了MLFM的效果。第1-3行的结果表明,当我们采用级联作为融合方法时,性能提升是边缘的。主要原因是不充分的融合可能会向特征引入额外的噪声信息,从而限制性能提升。然而,当我们使用MLFM时,与没有融合策略相比有显著改进。如图7所示,简单的级联融合策略可能会混淆模型,导致错误预测。相比之下,使用我们提出的MLFM,模型可以更好地识别整个目标的形状和轮廓。这清楚地表明,我们提出的MLFM确保了SAM编码器多级信息的充分利用。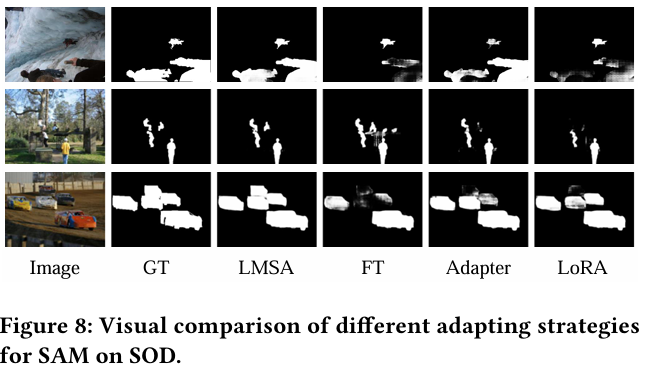
DEM的有效性。表4的第4-5行呈现了带有DEM及其MEEM组件的定量结果。许可看出,没有MEEM的DEM使用导致性能略有提升。然而,模型仍然缺乏足够的细节信息。此外,当整合MEEM时,模型性能显著提升。这些结果表明,MEEM的启用使模型能够捕获更多细节信息。图7证实,带有包含MEEM的DEM,模型获得了更多细粒度细节和边缘,达成了更好的SOD预测。
5 结论
在本文中,大家提出了一种名为MDSAM的新特征学习框架,用于SOD任务。该框架保留了SAM的预训练权重,同时整合了多尺度和细粒度信息。具体来说,通过在SAM编码器中引入LMSA,我们将SAM适应到SOD并使模型学习多尺度信息。此外,我们提出了MLFM,有效融合SAM编码器不同层的输出特征。为了增强SOD性能,我们提出了DEM来应对SAM中缺乏细粒度细节的问题。实验结果验证了我们方法的有效性和强大泛化能力。
致谢
本工作部分得到了中国国家自然科学基金(No. 62101092)和中央高校基本科研业务费专项资金(No. DUT23YG232)的支持。
参考文献
[1] Jimmy Lei Ba, Jamie Ryan Kiros, and Geoffrey E Hinton. 2016. Layer normalization. arXiv preprint arXiv:1607.06450 (2016).
[2] Jorge Bernal, Javier Sánchez, and Fernando Vilarino. 2012. Towards automatic polyp detection with a polyp appearance model. Pattern Recognition 45, 9 (2012), 3166-3182.
…
(注:由于篇幅限制,这里只展示了部分参考文献。完整的参考文献列表应包含原文中的全部引用。)
附录
A.1 模型泛化
原始SAM表现出强大的泛化能力。大家的MDSAM不仅向SAM引入了多尺度和细粒度细节,还保留了泛化能力。为了验证这一点,我们在伪装目标检测和息肉分割上进行了实验,这些任务具有很不同的域特征。
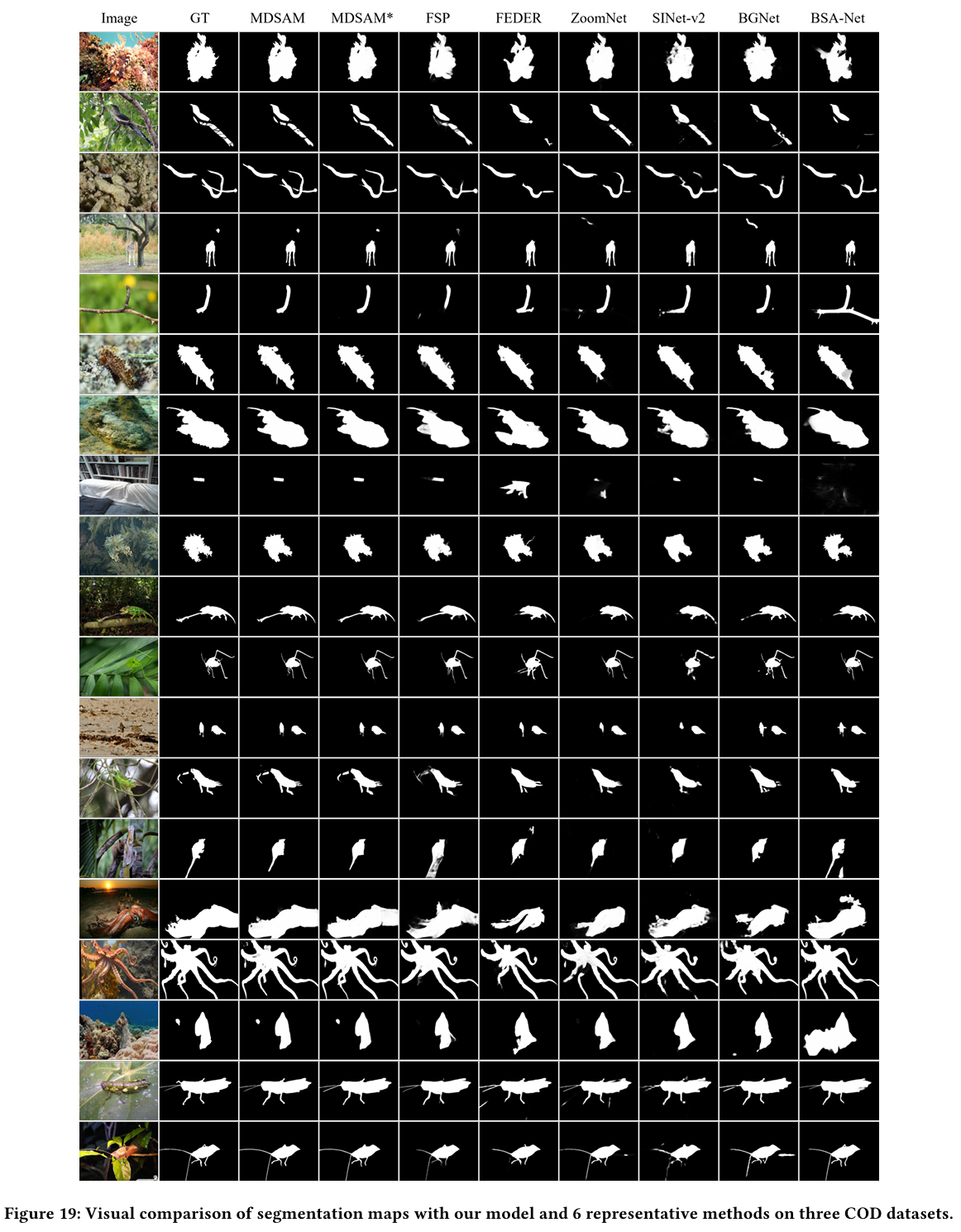
伪装目标检测(COD):与旨在寻找显著目标的SOD不同,COD专注于在困难场景中检测伪装目标。在这里,我们采用三个COD数据集进行模型训练和测试。COD10K[11]包含5,066个伪装、1,934个非伪装、3000个背景图像。CAMO[24]包含1,250个伪装和1,250个非伪装图像。NC4K[34]包含4,121个伪装图像。我们采用与[20]相似的训练策略。我们在COD10K训练数据集和CAMO训练数据集中所有包含伪装目标的图像上训练我们的MDSAM。接着,我们在所有测试数据集上测试MDSAM。我们的MDSAM与三个SOD模型(即F3Net[54]、MINet[39]和VST[31])和八个COD模型(即MGL-R[65]、C2FNet[45]、SINet-v2[11]、BSA-Net[76]、BGNet[46]、ZoomNet[38]、FEDER[14]和FSPNet[20])进行比较。我们采用四个指标进行评估。与SOD不同,我们用平均F-measure(Fβm)(F_{\beta}^{m})(Fβm)替换了最大F-measure(Fβmax)(F_{\beta}^{max})(Fβmax)。如表5所示,大家的MDSAM在COD任务上取得了相当的性能。在定性评估中,如图9所示,我们的MDSAM展示了更精确定位和细粒度细节。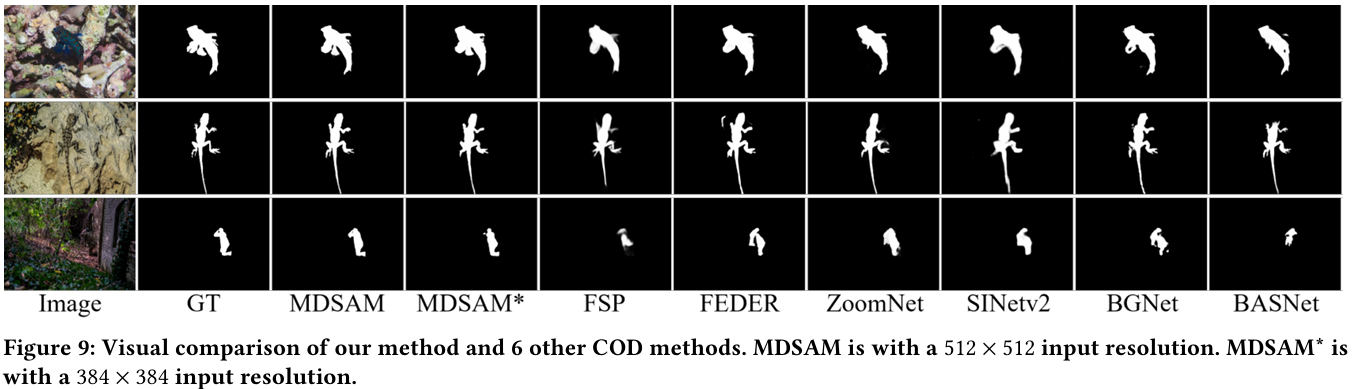
息肉分割:我们进一步在息肉分割上进行实验,这是一种典型的医学图像分割任务。我们采用与Poly-PVT[7]相同的训练策略,并在Kvasir[21]、CVC-300[2]上测试我们的技巧。如表6所示,我们的方法在息肉分割上取得了卓越性能。此外,与使用适配器增强的SAM相比,我们的方法在COD和息肉分割上都要好得多。
通过从上述实验中,能够看出大家的MDSAM不仅在SOD任务上表现出色,而且在COD和息肉分割上也表现出卓越性能。它们清楚地展示了我们模型的卓越泛化能力。
A.2 零样本分析
SAM在给予提示时具有强大的分割能力。我们从真实标签中的每个连接组件提取边界框,并将其用作SAM的框提示。我们还应用SAM-HQ[22]进行实验,它使SAM能够分割高质量结果。如表7所示,当给出准确提示时,SAM在SOD上表现显著良好。然而,SOD需要相应的语义信息。当没有给出提示时,SAM表现不佳。我们的MDSAM不仅改进了SAM的分割,还学习了SOD的语义信息。
A.3 更多消融研究
在我们提出的LMSA中,我们应用平均池化(AP)获取多尺度特征。此外,我们引入局部细节信息来消除SAM的缺点。在本节中,我们在不同尺度的LMSA和MDSAM中是否引入局部信息进行实验。实验在完全设计的MDSAM下进行,模型的输入分辨率设置为512×512。
通过尺度效果。表8显示了运用不同池化尺度的效果。如方式(a)和(b)以及(d)和(e)所示,只要保持多尺度,尺度的变化对结果的影响极其小。然而,如途径©和(e)所示,多尺度方法通常比单尺度方法表现更好。图10展示了与单尺度设置©相比,多尺度设置(d)和(e)能够更准确地检测复杂场景中的显著目标。因此,LMSA的尺度设置倾向于保持多尺度。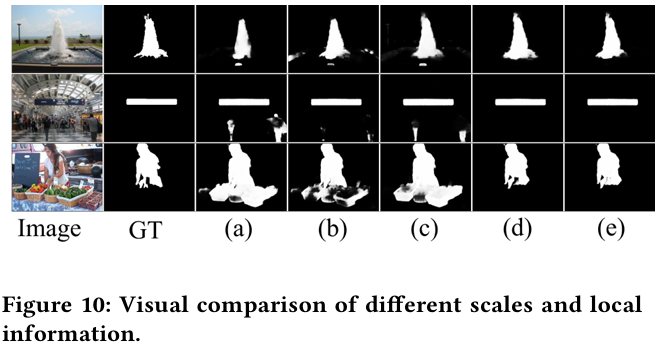
局部信息的有效性。为了进一步探索局部信息的效果,我们进行了更多实验,如表8所示。行观察到,随着局部信息的引入,模型性能显著提升。此外,与方法(b)和方法(e)相比,许可看到我们的MDSAM在相同尺度下在存在局部信息时表现出更好的性能。图10说明,局部信息使模型能够提取更精确的特征,从而产生更好的显著图。
A.4 基于属性的分析
在本节中,我们通过在具有挑战性的SOC[12]信息集上评估我们提出的方法,提供基于属性的分析。SOC测试数据集分为9个主要类别,分别是外观变化(AC,79张图像)、大目标(BO,24张图像)、杂乱(CL,92张图像)、异质目标(HO,153张图像)、运动模糊(MB,32张图像)、遮挡(OC,157张图像)、视野外(OV,155张图像)、形状复杂性(SC,116张图像)和小目标(SO,389张图像)。我们将我们的MDSAM与17种方法进行比较,包括Amulet[70]、DSS[17]、NLDF[33]、SRM[49]、BMPM[66]、C2SNet[27]、DGRL[50]、RANet[3]、CPD[56]、EGNet[73]、PoolNet[30]、SCRN[57]、BANet[44]、MINet[39]、ICON-R[78]、DC-Net-R[77]和完全微调的SAM[23]。如表9所示,我们的MDSAM在512×512和384×384分辨率下在大多数场景中表现出卓越性能。并且它们在AC和BO类别上平均表现,这些类别数据量较少。图11显示了我们提出的MDSAM与六个代表性最先进方法的一些可视化结果。这种可视化表明,当前途径在准确定位大目标和小目标方面存在困难,结果缺乏细粒度细节。我们的MDSAM许可准确定位多尺度目标,边缘和细节都非常精确。
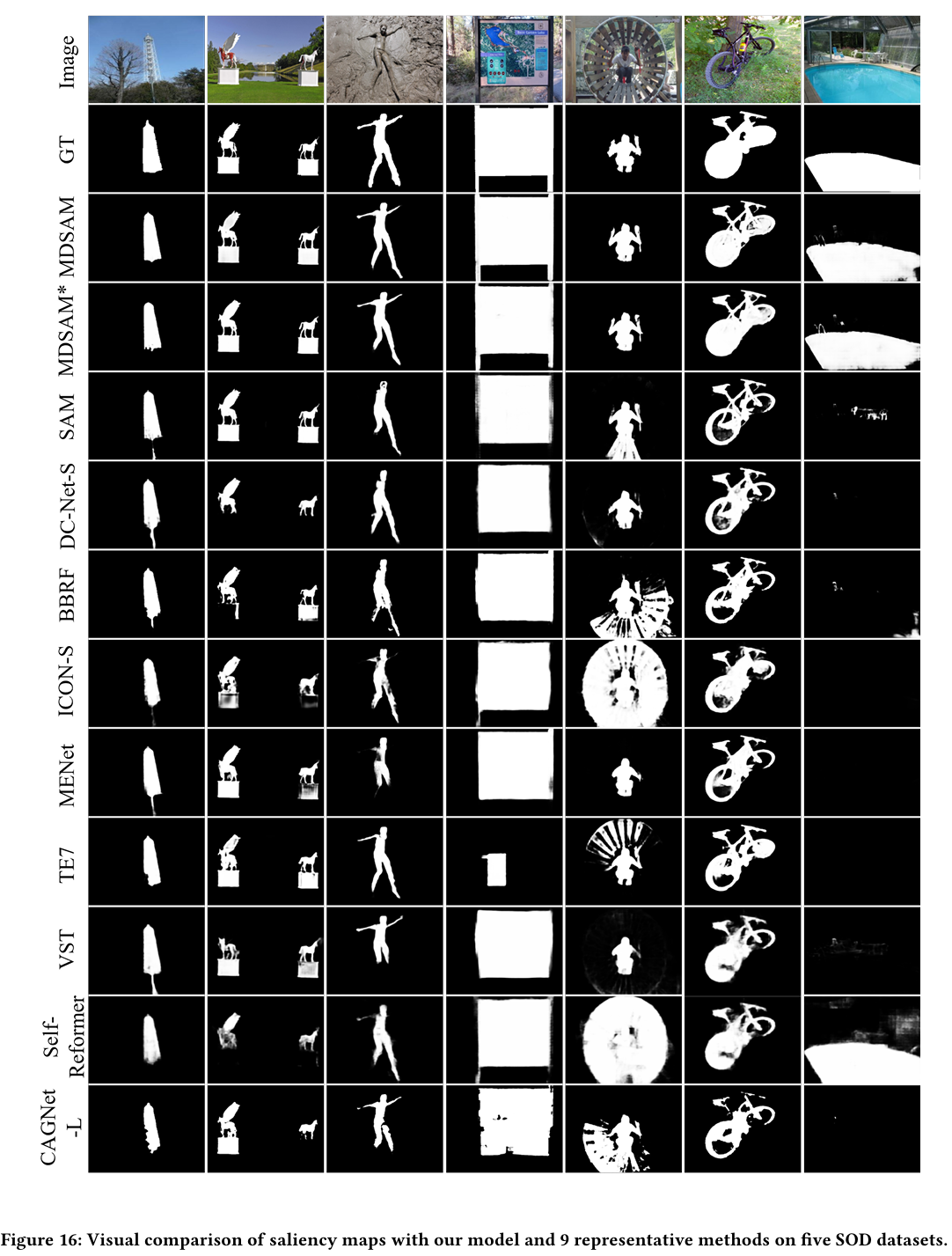
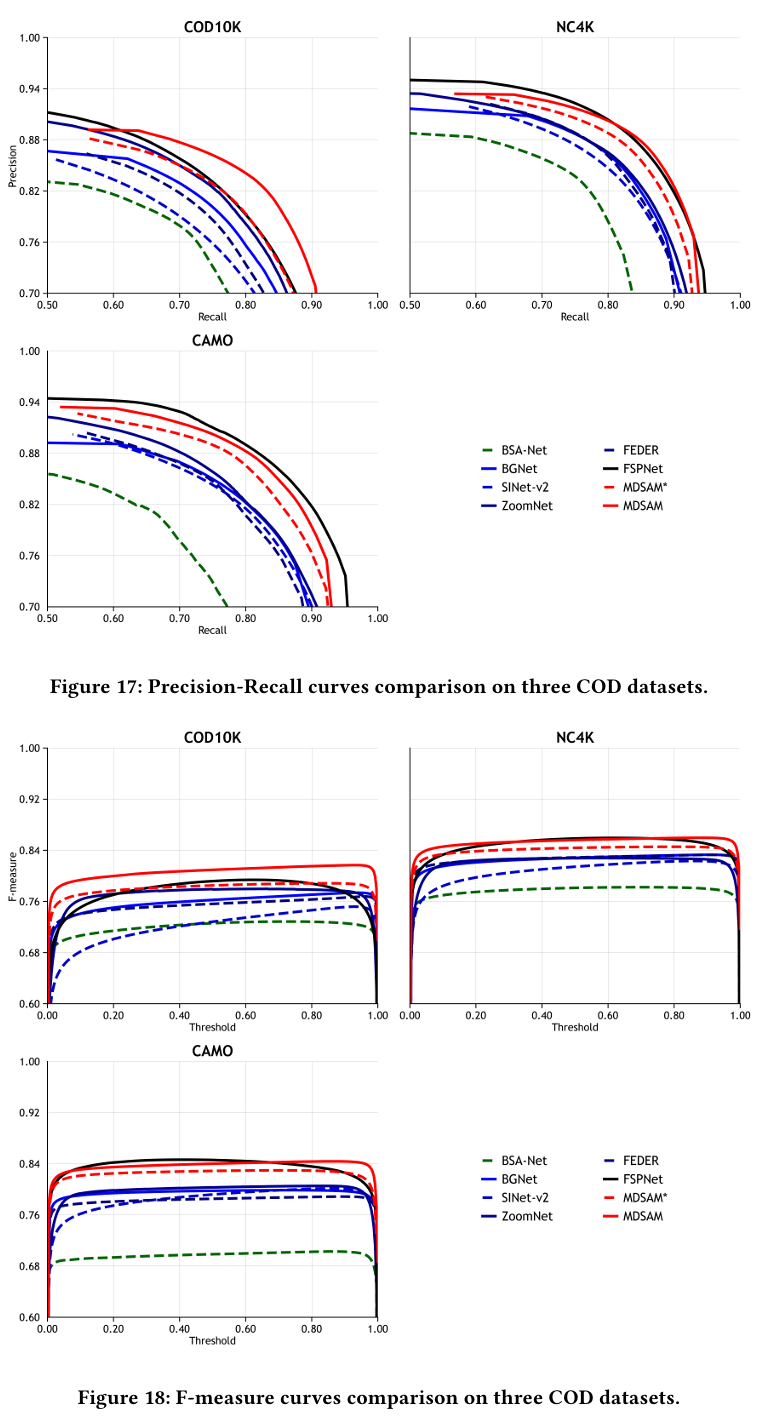
A.5 更多比较结果
在主论文中,我们通过四个广泛应用的指标将我们的MDSAM与其他方式进行比较。在本节中,我们在五个SOD数据集上与CAGNet-L[37]、TE7[25]、MENet[52]、VST[31]、SelfReformer[63]、ICON-S[78]、BBRF[36]、DC-Net-S[77]和完全微调的SAM[23]比较,展示精确率-召回率曲线和F-measure曲线,分别如图12和图13所示。此外,我们在图14、图15和图16中给出了更多视觉比较。在图17和图18中,我们展示了在三个COD数据集上与SINet-v2[11]、BSA-Net[76]、BGNet[46]、ZoomNet[38]、FEDER[14]和FSPNet[20]比较的曲线。更多视觉比较表明在图19中。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号