1 %创建具有障碍物的栅格地图
2 %矩阵中1代表黑色栅格
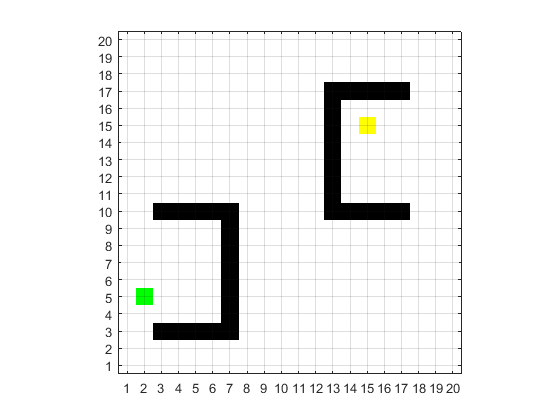
3 a = zeros(20);
4 a(3,3:7)=2;
5 a(3:10,7)=2;
6 a(10,3:7)=2;
7 a(17,13:17)=2;
8 a(10:17,13)=2;
9 a(10,13:17)=2;
10 a(5,2)=5;
11 a(15,15)=6;
12
13
14
15
16 % 白色,可行路径
17 % 黑色,障碍物
18 % 红色,visited
19 % 蓝色,on list
20 % green,start
21 % yellow,destination
22 map_color = [1 1 1;
23 0 0 0;
24 1 0 0;
25 0 0 1;
26 0 1 0;
27 1 1 0];
28 % disp(map_color(1,:));
29
30 colormap(map_color); % 创建颜色
31 %disp(size(a));
32
33 image(1:size(a,2),1:size(a,1),a); % 赋予栅格颜色
34 set(gca,'XTick',1:size(a,1),'YTick',1:size(a,2)); % 设置坐标
35 axis image xy; % 沿每个坐标轴使用相同的数据单位,保持一致
36 grid on;
![]()


 浙公网安备 33010602011771号
浙公网安备 33010602011771号