
1.几何变换
定义:利用一套控制点和变换方程,将数字地图或图像从一种坐标系转换成另一种坐标系的过程
操作对象:矢量(数字地图)——重投影过程 栅格(图像)——重采样过程
转换精度的评价RMS:均方根误差——度量控制点从真实位置到估算位置之间的偏移
2.各种仿射矩阵



read_image (Image, 'printer_chip/printer_chip_01') get_image_size (Image, Width, Height) *生成标准矩阵 hom_mat2d_identity (HomMat2DIdentity) *平移 hom_mat2d_translate (HomMat2DIdentity, Height/2, Width/2, HomMat2DTranslate) *旋转 hom_mat2d_rotate旋转默认不会改变图像大小,但当仿射图像时最后一个参数为true,右侧和下方的超出图像的区域会被裁减掉,此时图像大小会变化 hom_mat2d_rotate (HomMat2DIdentity, rad(90), Height/2, Width/2, HomMat2DRotate) *rotate_image围绕中心旋转,会改变图像大小 rotate_image (Image, ImageRotate, 90, 'constant') *镜像 mirror_image (ImageRotate, ImageMirror, 'row') *缩放 hom_mat2d_scale (HomMat2DIdentity, 0.5, 0.5, 0, 0, HomMat2DScale) *图像仿射变换 最后一个为true,会对图像进行裁剪,右侧和下方的超出图像的区域会被裁减掉,此时图像大小会变化 affine_trans_image (Image, ImageAffineTrans, HomMat2DScale, 'constant', 'true') *zoom_image_factor是以0,0位缩放起点,会改变图像大小 zoom_image_factor (Image, ImageZoomed, 0.5, 0.5, 'constant') *上述ImageZoomed图像和ImageAffineTrans完全一样 *斜切 hom_mat2d_slant (HomMat2DIdentity, rad(45), 'x', Height/2, Width/2, HomMat2DSlant)
3.九点标定
由来:相机和机器人原点不一致(平移)、安装角度不一致(旋转)、图像坐标到世界坐标的映射(缩放)、机器人的轴不可能一定是90度(斜切)
| 算子 | 输入 | 输出 | 俗称 |
| vector_to_hom_mat2d( : : Px, Py, Qx, Qy : HomMat2D) | 输入为数组,PxPy为图像坐标(不在一条线上的安个点),QxQy为机器人坐标 | 包括平移、旋转、缩放、斜切, | 九点标定(多是图像坐标到机器人师姐坐标的映射) |
| vector_angle_to_rigid( : : Row1, Column1, Angle1, Row2, Column2, Angle2 : HomMat2D) | 输入为一个点加角度,输出为一个点加角度 | 包括平移、旋转 | 仿射变换(都是在图像坐标系内的刚性变换) |
4.示例
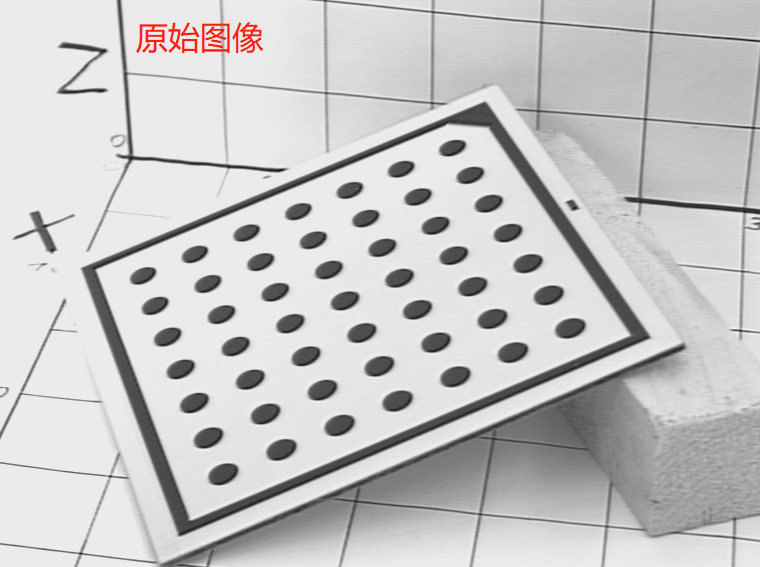
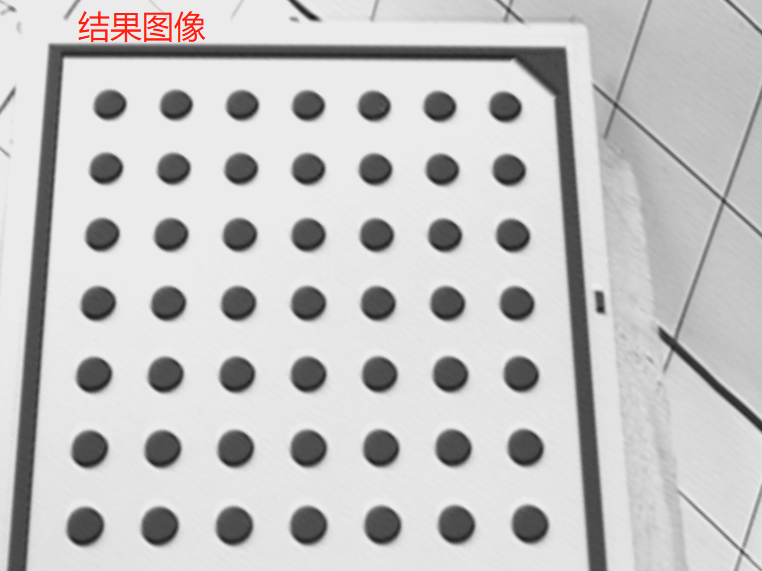
dev_close_window () dev_open_window (0, 0, 512, 512, 'black', WindowHandle) read_image (Image, 'cali/grid_space.cal.k.003') threshold (Image, Region, 0, 100) connection (Region, ConnectedRegions) *筛选圆点 select_shape (ConnectedRegions, SelectedRegions, 'circularity', 'and', 0.5139, 1) select_shape (SelectedRegions, SelectedRegions1, 'area', 'and', 150, 99999) *把圆点搞正 union1 (SelectedRegions1, RegionUnion) smallest_rectangle2 (RegionUnion, Row, Column, Phi, Length1, Length2) gen_rectangle2 (Rectangle, Row, Column, Phi, Length1, Length2) *通过点角度,对应关系得到变换矩阵 vector_angle_to_rigid (Row, Column, Phi, Row, Column, 0, HomMat2D) *区域的几何变换 affine_trans_region (RegionUnion, RegionAffineTrans, HomMat2D, 'nearest_neighbor') connection (RegionAffineTrans, ConnectedRegions1) area_center (ConnectedRegions1, Area, Row1, Column1) sort_region (ConnectedRegions1, SortedRegions, 'character', 'true', 'row') *生成一个等差数组 tuple_gen_sequence (1, 49, 1, Sequence) disp_message (WindowHandle, Sequence, 'image', Row1, Column1, 'black', 'true') *变换矩阵关系取反 hom_mat2d_invert (HomMat2D, HomMat2DInvert) *像素坐标的几何变换 affine_trans_pixel (HomMat2DInvert, Row1, Column1, RowTrans, ColTrans) disp_message (WindowHandle, RowTrans, 'image', RowTrans, ColTrans, 'black', 'true') row:=[] col:=[] startR:=100 startC:=100 step:=70 for r := 1 to 7 by 1 for c := 1 to 7 by 1 row:=[row,startR+(r-1)*step] col:=[col,startC+(c-1)*step] endfor endfor vector_to_hom_mat2d (RowTrans, ColTrans, row, col, HomMat2D1) *图像的几何变换 affine_trans_image (Image, ImageAffineTrans, HomMat2D1, 'constant', 'false')
