


MATLAB雷达定位系统仿真
MATLAB雷达定位系统仿真是一个涉及信号处理、目标检测与跟踪的复杂过程。
雷达定位仿真的核心步骤
一个典型的雷达定位仿真通常包含以下环节,其核心流程可归纳为:
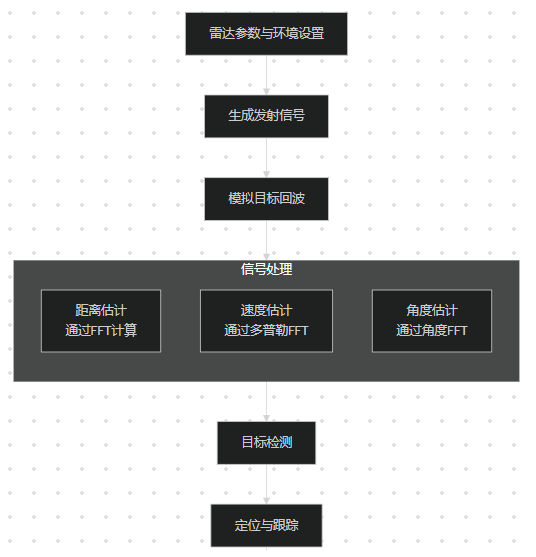
雷达系统参数设置与目标建模
仿真的第一步是定义雷达系统自身的工作参数和需要探测的目标特性。
雷达关键参数设置:
- 载波频率:如77GHz(毫米波雷达常用)
- 带宽:直接影响距离分辨率
- 脉冲重复频率(PRF):影响最大不模糊距离和速度
- 天线阵列:天线个数和排列影响角度测量精度和波束形状
目标与环境建模:
- 通常假设目标由多个散射点组成
- 可定义目标的初始位置、速度、雷达截面积(RCS)等
- 环境模型中可加入杂波(如地面杂波)和噪声(如热噪声)
一个简单的参数设置和信号生成示例如下:
% FMCW雷达参数设置
fc = 77e9; % 载波频率 77GHz
B = 2e9; % 带宽 2GHz
Tc = 1e-3; % Chirp周期 1ms
K = B / Tc; % 调频斜率
c = 3e8; % 光速
lambda = c / fc; % 波长
% 目标参数
target_range = 5; % 目标距离 5米
target_velocity = 2; % 目标径向速度 2m/s
target_angle = 30; % 目标方位角 30度
% 生成FMCW中频信号
t = 0:1/(10*B):Tc; % 采样时间
f_IF = 2*K*target_range/c; % 中频信号频率
s_IF = cos(2*pi*f_IF*t + pi*K*t.^2); % 中频信号
信号处理与参数估计
雷达接收到的中频信号需要经过一系列处理才能提取出目标信息。
距离估计
通过距离FFT将时域信号转换为频域,找到峰值对应的频率,进而计算目标距离:
% 距离FFT
N_r = 1024; % FFT点数
fft_r = fft(s_IF, N_r);
f_r = (0:N_r-1)*(10*B)/N_r; % 频率轴
R_est = (c * f_r) / (2*K); % 距离轴
% 寻找峰值位置,估计目标距离
[~, idx_r] = max(abs(fft_r));
R_result = R_est(idx_r);
速度估计
利用多普勒效应,通过多个Chirp之间的相位变化估计目标速度:
% 多普勒FFT(需要多个Chirp数据)
N_c = 64; % Chirp个数
phase_diff = 4*pi*target_velocity*Tc/lambda; % 相邻Chirp相位差
fft_d = zeros(1, N_c);
for i = 1:N_c
s_IF_i = s_IF .* exp(1j*(i-1)*phase_diff); % 添加相位差
fft_d(i) = fft(s_IF_i, N_r)(idx_r); % 提取目标频率点
end
fft_d = fft(fft_d);
v_est = (lambda * (-N_c/2:N_c/2-1)*Tc*N_c) / (4*pi*Tc); % 速度轴
[~, idx_v] = max(abs(fft_d));
v_result = v_est(idx_v); % 估计速度
角度估计
使用多个接收天线,通过相位干涉法估计目标角度:
% 角度FFT(需要多个接收天线)
N_ant = 8; % 接收天线数
d_ant = lambda/2; % 天线间距
phase_ant = 2*pi*d_ant*sind(target_angle)/lambda; % 相邻天线相位差
fft_a = zeros(1, N_ant);
for i = 1:N_ant
s_IF_ant = s_IF .* exp(1j*(i-1)*phase_ant); % 添加天线相位差
fft_a(i) = fft(s_IF_ant, N_r)(idx_r); % 提取目标频率点
end
fft_a = fft(fft_a, 180); % 补零到180点,提升角度分辨率
theta_est = (-90:89); % 角度轴(-90~89度)
[~, idx_a] = max(abs(fft_a));
theta_result = theta_est(idx_a); % 估计方位角
目标检测与跟踪
恒虚警率(CFAR)检测
在雷达信号处理中,恒虚警率(CFAR)检测是关键步骤,用于在噪声和杂波背景中自动检测目标,同时保持恒定的虚警概率。其基本原理可概括为:
- 滑动检测窗口:对信号进行扫描,逐个单元进行检测。
- 自适应阈值:在每个待检测单元(CUT)周围设置参考单元(保护单元用于防止目标能量泄漏,训练单元用于估计噪声水平),根据训练单元计算局部噪声功率,再根据设定的虚警概率计算检测阈值。
- 目标判定:如果待检测单元的信号功率超过阈值,则判定为目标。
轨迹跟踪(卡尔曼滤波)
卡尔曼滤波通过“预测-更新”两个步骤,对目标运动状态进行最优估计:
% 卡尔曼滤波初始化
% 状态向量: [x; vx; y; vy]
A = [1, dt, 0, 0; % 状态转移矩阵
0, 1, 0, 0;
0, 0, 1, dt;
0, 0, 0, 1];
H = [1, 0, 0, 0; % 观测矩阵
0, 0, 1, 0];
% 预测步骤
x_pred = A * x_est; % 状态预测
P_pred = A * P_est * A' + Q; % 误差协方差预测
% 更新步骤
z = [measured_x; measured_y]; % 实际观测值
y = z - H * x_pred; % 创新向量
S = H * P_pred * H' + R; % 创新协方差
K = P_pred * H' / S; % 卡尔曼增益
x_est = x_pred + K * y; % 状态更新
P_est = (eye(4) - K * H) * P_pred; % 协方差更新
参考代码 matalb 雷达定位系统仿真 www.youwenfan.com/contentcnl/78865.html
高级功能与仿真工具
除了基本的信号处理,MATLAB还提供了一系列高级工具和功能,可以构建更复杂的雷达仿真系统:
- 相控阵系统工具箱:提供用于设计、模拟和分析相控阵雷达系统的工具和算法。
- 雷达系统设计器:一个交互式工具,允许您通过图形界面设计和分析雷达系统。
- 信号处理工具箱:包含一系列信号处理算法,可用于雷达信号生成、滤波、统计信号处理等。
- 传感器融合与跟踪工具箱:提供跟踪滤波器、数据关联算法和多传感器融合工具。
一个简单的雷达定位仿真示例
下面展示了一个简化的雷达定位仿真流程:
% 初始化参数
clear; clc;
fc = 77e9; B = 2e9; Tc = 1e-3; K = B/Tc;
c = 3e8; lambda = c/fc;
% 目标设置
targets = [100, 10, 30; % [距离(m), 速度(m/s), 角度(度)]
150, -5, -10];
% 仿真循环
for i = 1:size(targets, 1)
% 生成回波信号
[s_IF, t] = generate_echo_signal(targets(i, :), fc, K, c, Tc, B);
% 距离估计
[R_est, fft_r] = range_estimation(s_IF, K, c, B);
% 速度估计
v_est = velocity_estimation(s_IF, targets(i,2), Tc, lambda, R_est, B);
% 角度估计
theta_est = angle_estimation(s_IF, targets(i,3), lambda, R_est, B);
% 显示结果
fprintf('目标%d: 估计距离=%.2fm, 估计速度=%.2fm/s, 估计角度=%.2f度\n', ...
i, R_est, v_est, theta_est);
end
% 绘制距离频谱
figure;
plot((0:1023)*c/(2*K*1024), abs(fft_r));
xlabel('距离 (m)'); ylabel('幅度');
title('距离FFT结果');
grid on;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号