RGDA——Rationalizing Graph Neural Networks with Data Augmentation【利用数据增强对图神经网络进行合理化解释】
论文信息
论文标题:Rationalizing Graph Neural Networks with Data Augmentation
论文作者:Gang Liu、Eric Inae、Tengfei Luo、Meng Jiang
论文来源:
论文地址:link
论文代码:link
Method
4.1 关键内容拆解
-
符号简化:为统一节点级与图级任务的表述,将节点标签 $y_v$ 与图标签 $y_g$ 统一记为 $y$ ,用 $y_i/y_j$ 表示索引为 $i/j$ 的节点或图的标签,降低后续公式与逻辑的复杂度。
-
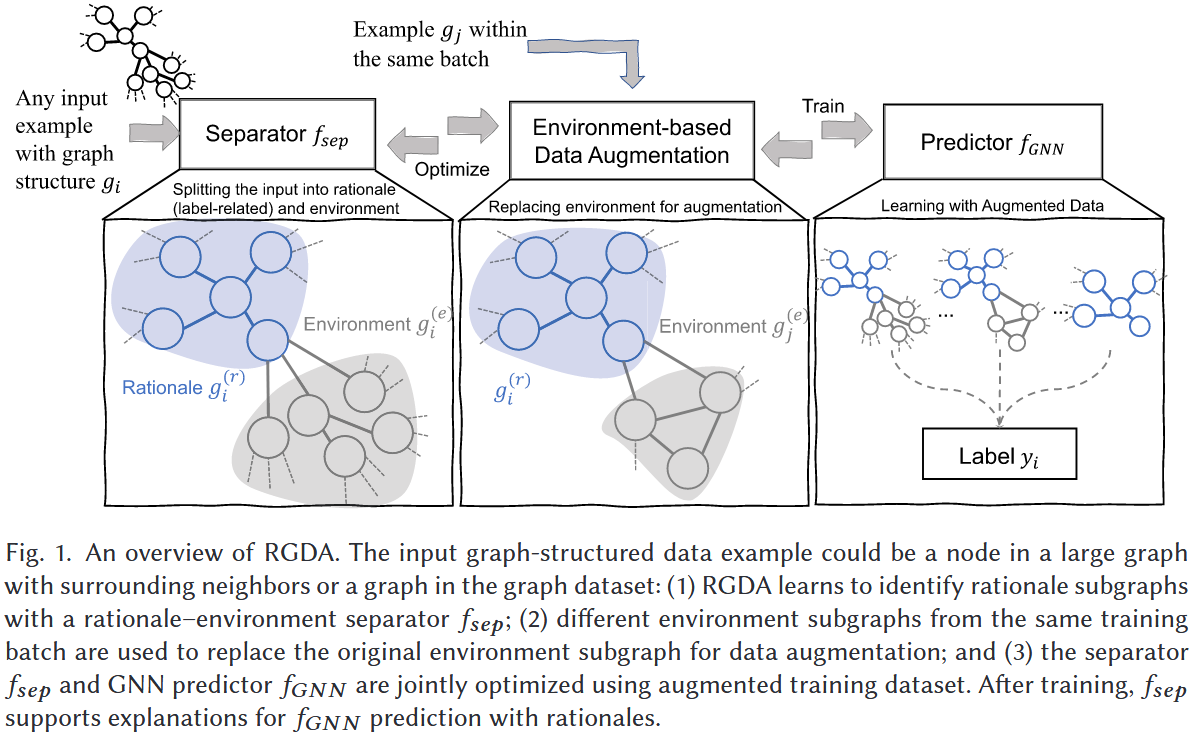
核心思想:无论节点级还是图级任务,GNN 的预测均依赖 “计算图”(节点级为邻域图,图级为输入图本身)提取表征。RGDA 的统一逻辑是:
-
在表征空间(而非显式图结构空间)中完成 “理据 - 环境分离”,避免图编解码的高复杂度;
-
通过 “理据 - 环境组合” 生成增强样本,同时优化分离函数 $f_{sep}$ 与 GNN 预测器 $f_{GNN}$ ,确保理据子图的准确性与模型泛化能力。
-
4.2 核心操作 1:理据 - 环境分离(Rationale-Environment Separation)
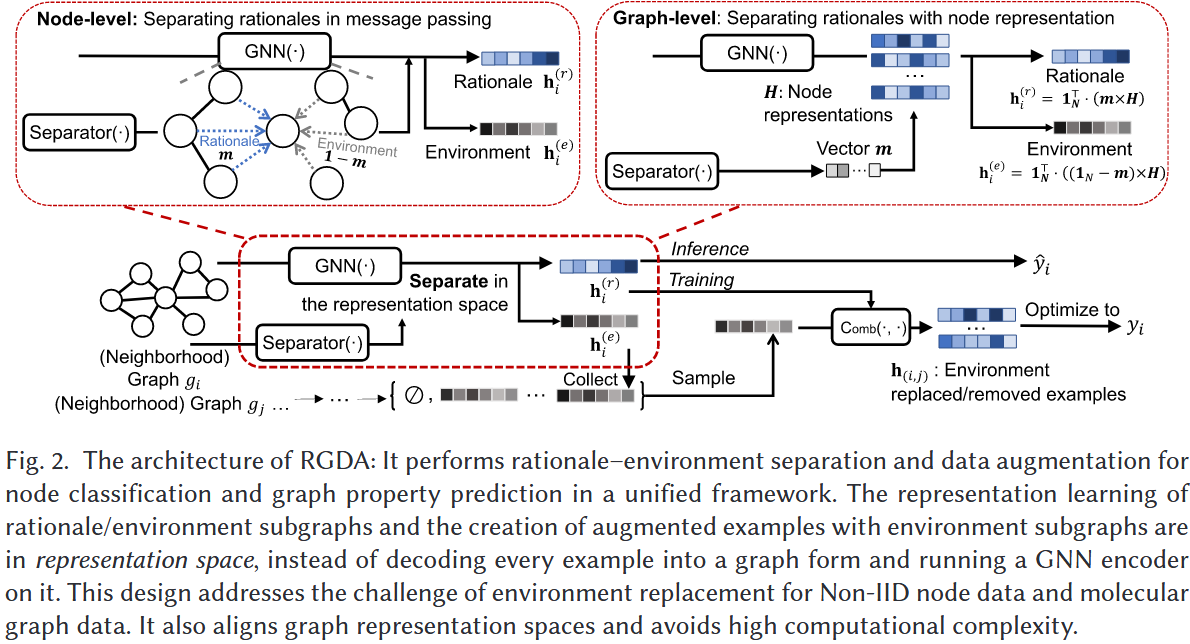
通过分离函数 $f_{sep}$ 将计算图划分为 “理据子图”(决定标签的核心结构)与 “环境子图”(无关噪声结构),针对节点级与图级任务设计差异化实现方式,但均基于表征空间操作。
1. 节点分类任务的分离逻辑
适用场景:预测节点 $v$ 的标签时,GNN 依赖其 $K$ 阶邻居构成的 “隐式邻域图”,需从邻居中区分理据节点与环境节点。
关键步骤:
- Step 1:生成分离掩码:对节点 $v$ 的每个直接邻居 $u$ ,通过多层感知机(MLP)计算掩码概率 $m_{vu}$ ,表示 $u$ 属于 $v$ 的理据邻居的概率:
$m_{vu}=sigmoid\left(MLP_{sep }\left(\left[x_{v} \| x_{u}\right]\right)\right)$
其中 $[x_v \| x_u]$ 表示节点 $v$ 与 $u$ 的特征向量拼接, $1-m_{vu}$ 则为 $u$ 属于环境邻居的概率。
- Step 2:理据子图表征计算:在 GNN 的 K 层消息传递中,仅传递理据邻居的加权消息(权重为 $m_{vu}$ ),更新理据子图的节点表征 $h_{v,k}^{(r)}$ :
$\begin{array} {rl}&{h_{v, k}^{(r)}=U_{k}\left( h_{v, k}^{(r)}, a_{v, k}^{(r)}\right) , where }\\ &{a_{v, k}^{(r)}=M_{k}\left( \left\{ \left( h_{v, k-1}^{(r)},h_{u, k-1}^{(r)},m_{v u}\right) , \forall u \in \mathcal {N}(v)\right\} \right) .}\end{array}$
初始理据表征 $h_{v,0}^{(r)}$ 由节点 $v$ 的原始特征 $x_v$ 初始化。
- Step 3:环境子图表征计算:仅在 GNN 第一层消息传递中使用 $1-m_{vu}$ 加权环境邻居消息,得到初始环境表征 $h_{v,1}^{(e)}$ ,后续 $K-1$ 层采用标准消息传递更新,最终得到环境子图表征 $h^{(e)}$ :
$\begin{array} {rl}&{h_{v,1}^{(e)}=U_{1}\left( x_{v},a_{v,1}^{(e)}\right) , where }\\ &{a_{v,1}^{(e)}=M_{1}\left( \left\{ (x_{v},x_{u},1-m_{vu}\right) ,\forall u\in \mathcal {N}(v)\right\} ).}\end{array}$
2. 图属性预测任务的分离逻辑
适用场景:预测整个图的属性(分类 / 回归)时,需从输入图的所有节点中区分理据节点与环境节点。
关键步骤:
- Step 1:生成节点级分离掩码:先通过专用 GNN( $GNN_{sep}$ )提取图中每个节点的上下文表征,再用 MLP 计算每个节点属于理据子图的概率 $m_v$ (掩码向量 $m$ ):
$m=sigmoid\left(MLP_{sep }\left(GNN_{sep }(g)\right)\right)$
$1_N - m$ ( $1_N$ 为全 1 列向量)则为节点属于环境子图的概率。
-
Step 2:生成 GNN 节点表征:用预测任务的 GNN( $f_{GNN}$ )提取全图节点的表征矩阵 $H=GNN(g)$
-
Step 3:理据 / 环境子图表征计算:通过求和池化(readout 函数),分别对理据节点与环境节点的表征加权求和,得到两类子图的最终表征(维度 $\mathbb{R}^d$ ):
$h^{(r)}=1_{N}^{\top} \cdot(m \times H), \quad h^{(e)}=1_{N}^{\top} \cdot\left(\left(1_{N}-m\right) \times H\right)$
4.3 核心操作 2:基于环境子图的数据增强
针对训练数据稀疏问题,利用分离得到的理据子图( $h^{(r)}$ )与环境子图( $h^{(e)}$ )表征,在表征空间中生成新训练样本,无需显式修改图结构,兼顾效率与有效性。
1. 增强操作的前提假设
理据子图是决定标签的 “因果因子”,环境子图仅为 “噪声”,因此:
-
-
仅用理据子图应能实现有效预测;
-
替换环境子图不会改变标签,可用于生成多样化样本。
-
2. 两种核心增强策略
1)环境移除增强(Environment Removal Augmentation)
目的:验证理据子图的预测有效性,强制模型依赖核心结构而非噪声。
操作逻辑:仅使用理据子图表征 $h_i^{(r)}$ 进行预测,无需结合环境子图。
-
-
节点分类:对 $h_i^{(r)}$ 应用 $softmax$ 函数得到预测标签 $\hat{y}_i^{(r)}$ ;
-
图属性预测:修改图预测公式,直接用 $h_i^{(r)}$ 输入 MLP 得到预测:
-
$\hat{y}_{i}^{(r)}=MLP\left(h_{i}^{(r)}\right)$
2)环境替换增强(Environment Replacement Augmentation)
目的:生成大量虚拟样本,增强模型对环境噪声的鲁棒性,缓解数据稀疏。
操作逻辑:对批次内(共 $B$ 个样本)索引为 $i$ 的样本,将其理据子图表征 $h_i^{(r)}$ 与其他任意样本 $j$ ( $j \ne i$ )的环境子图表征 $h_j^{(e)}$ 通过组合函数(Comb (・,・)) 拼接,生成新样本的表征 $h_{(i,j)}$ ,新样本标签仍为 $y_i$ (因理据子图未变)。
-
- 1、组合函数选择:支持求和、均值、最大值、拼接等池化操作,论文默认使用元素级求和(实验验证效果最优):
$h_{(i,j)}=Comb\left(g_{i}^{(r)}, g_{j}^{(e)}\right)=h_{i}^{(r)}+h_{j}^{(e)}$
-
- 2、预测逻辑:新样本的预测标签通过 MLP 计算:
$\hat{y}_{(i,j)}=MLP\left(h_{(i,j)}\right)$
-
- 3、样本数量控制:图级任务中,每个样本可与批次内 $\tilde{B}=B-1$ 个其他样本组合;节点级任务中, $\tilde{B}$ 设为超参数(避免样本量过大)。
4.4 模型优化:损失函数与训练策略
1. 损失函数设计
根据任务类型(分类 / 回归)选择基础损失,结合增强样本损失与正则化损失,确保模型性能与理据子图质量。
环境移除损失( $\mathcal{L}_{rem}$ ):确保理据子图单独预测的准确性
二分类任务用交叉熵损失
$\mathcal{L}_{rem}=y_i \cdot log \hat{y}_i^{(r)}+(1-y_i) \cdot log (1-\hat{y}_i^{(r)})$
环境替换损失( $\mathcal{L}_{rep}$ ):确保模型对环境噪声的鲁棒性
批次内所有替换样本的平均交叉熵损失
$\mathcal{L}_{rep}=\frac{1}{B}\sum_{j=1}^B [y_i \cdot log \hat{y}_{(i,j)}+(1-y_i) \cdot log (1-\hat{y}_{(i,j)})]$
正则化损失( $\mathcal{L}_{reg}$ ):避免理据子图过大(包含噪声)或过小(丢失关键结构)
$\mathcal{L}_{reg }=\left|\frac{1}{N} \cdot 1_{N}^{\top} \cdot m-\gamma\right|$ , $\gamma \in [0,1]$
2. 训练策略:交替优化
采用 “交替训练” 模式,分别优化分离函数 $f_{sep}$ 与 GNN 预测器 $f_{GNN}$ ,避免联合训练时的优化不稳定:
预测器损失( $\mathcal{L}_{pred}$ ) :用于训练 $f_{GNN}$ ,仅包含增强样本的预测损失:
$\mathcal{L}_{pred }=\mathcal{L}_{rem }+\alpha \cdot \mathcal{L}_{rep}$
其中 $\alpha$ 为超参数,控制替换损失的权重。
分离函数损失( $\mathcal{L}_{sep}$ ) :用于训练 $f_{sep}$ ,额外加入正则化损失:
$\mathcal{L}_{sep }=\mathcal{L}_{rem }+\alpha \cdot \mathcal{L}_{rep }+\beta \cdot \mathcal{L}_{reg }$
其中 $\beta$ 为超参数,控制正则化损失的权重。
训练流程:迭代固定轮次 $T_{sep}$ (训练 $f_{sep}$ )与 $T_{pred}$ (训练 $f_{GNN}$ ),直至模型收敛。
3. 推理阶段逻辑
训练完成后,仅使用理据子图表征 $h_i^{(r)}$ 进行最终预测( $\hat{y}_i^{(r)}=MLP(h_i^{(r)})$ ),确保预测结果由核心理据支撑,提升可解释性。
4.5 复杂度分析:效率优势验证
从时间复杂度角度,验证 RGDA 在大规模数据上的适用性,核心结论是 “表征空间操作显著降低复杂度”。
1. 基础复杂度(GNN 部分)
假设单批次有 $n$ 个节点、 $m$ 条边,GNN 共 $K$ 层:
单 GNN 层时间复杂度: $O(n d^2 + m d)$ ( $d$ 为表征维度,稀疏矩阵乘法优化);
$K$ 层 GNN 总复杂度: $O(K n d^2 + K m d)$ 。
2. RGDA 额外复杂度
分离函数 $f_{sep}$ :基于独立 GNN 实现,复杂度与标准 GNN 线性相关,无额外负担;
数据增强操作:
节点级任务:表征组合的复杂度为 $O(n^2)$ ( $n$ 为节点数);
图级任务:表征组合的复杂度为 $O(n'^2)$ ( $n'$ 为图数);
总复杂度:
节点级: $O(K n d^2 + K m d + n^2)$ ;
图级: $O(K n d^2 + K m d + n'^2)$ 。
3. 效率优势
相较于显式修改图结构的方法(如 DIR 需编解码子图,复杂度指数级增长),RGDA 在表征空间操作,复杂度仅线性增加,可支持大规模数据集(如 ogbn-Arxiv,百万级节点)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号