

MicroPython-TPYBoard固件编译教程
本文主要介绍一下,在Linux环境下编译micropython固件的方法和流程。
首先,我们先来看一下MicroPython的源码结构。
github地址:https://github.com/micropython/micropython
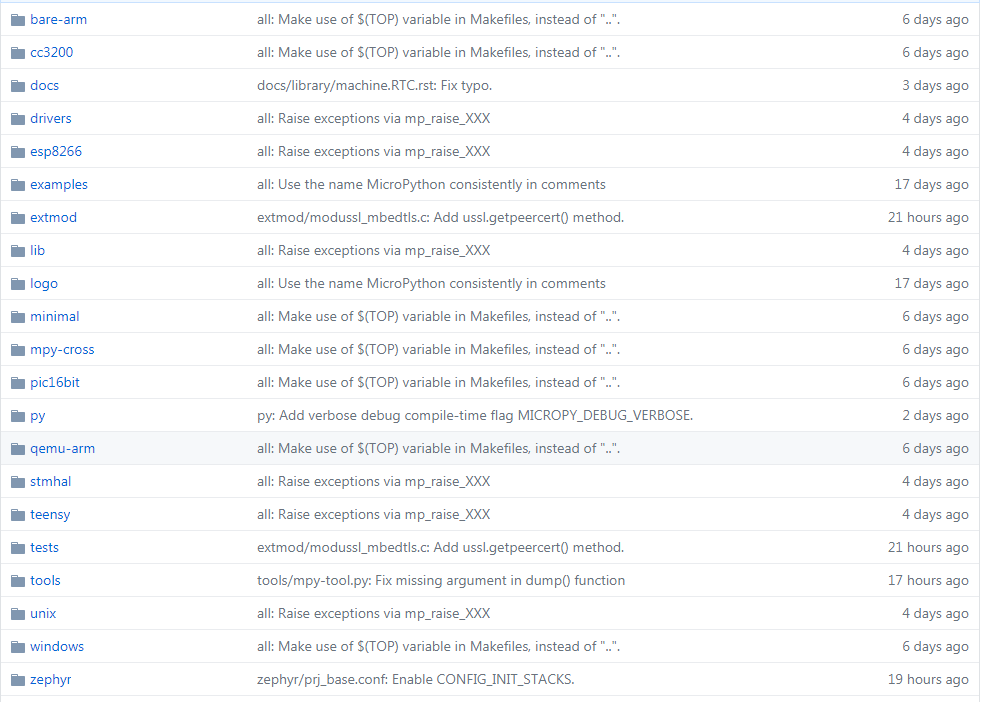
你会发现,micropython根据不同的MCU运行平台进行了分类,比如esp8266目录下就是esp8266-WIFI模块上的micropython的源码,stmhal是运行在stm32上的,还有cc3200等。
|
py/ |
Python实现的核心部分,包括编译器、运行时、核心库 |
|
mpy-cross/ |
MicroPython 自带的交叉编译器,可以将python脚本编译为mpy加密文件 |
|
unix/ |
在UNIX上运行的MicroPython |
|
stmhal/ |
在TPYBoard和类似的STM32开发板上运行的MicroPython |
|
minimal/ |
MicroPthon的最小集,用于移植到其他微处理器 |
|
tests/ |
测试框架和测试脚本 |
|
docs/ |
MicroPython官方的reStructuredText文档资料。地址:http://docs.micropython.org |
|
bare-arm/ |
在ARM上MicroPython的最小版本 |
|
teensy/ |
在Teensy 3.1上运行的MicroPython |
|
pic16bit/ |
在16 位 PIC 微控制器上运行的MicroPython |
|
esp8266/ |
在ESP8266 WIFI模块上运行的MicroPython |
|
extmod/ |
C 实现的模块 |
|
tools/ |
各种工具 |
|
examples/ |
Python脚本实例 |
|
READ.md |
说明文档 |
开始编译固件
本人的系统环境:ubuntu15.0464位系统
Ubuntu官网:http://cn.ubuntu.com/?_ga=2.264511627.56850772.1502953593-1795108721.1502953593
1、安装arm-none-eabi-gcc交叉编译工具和gcc编译器
打开终端执行命令
sudo apt-get install gcc-arm-none-eabi sudo apt-get install gcc
2、下载micropython的源码包
我放在了/opt目录下
git clone --recursive https://github.com/micropython/micropython.git

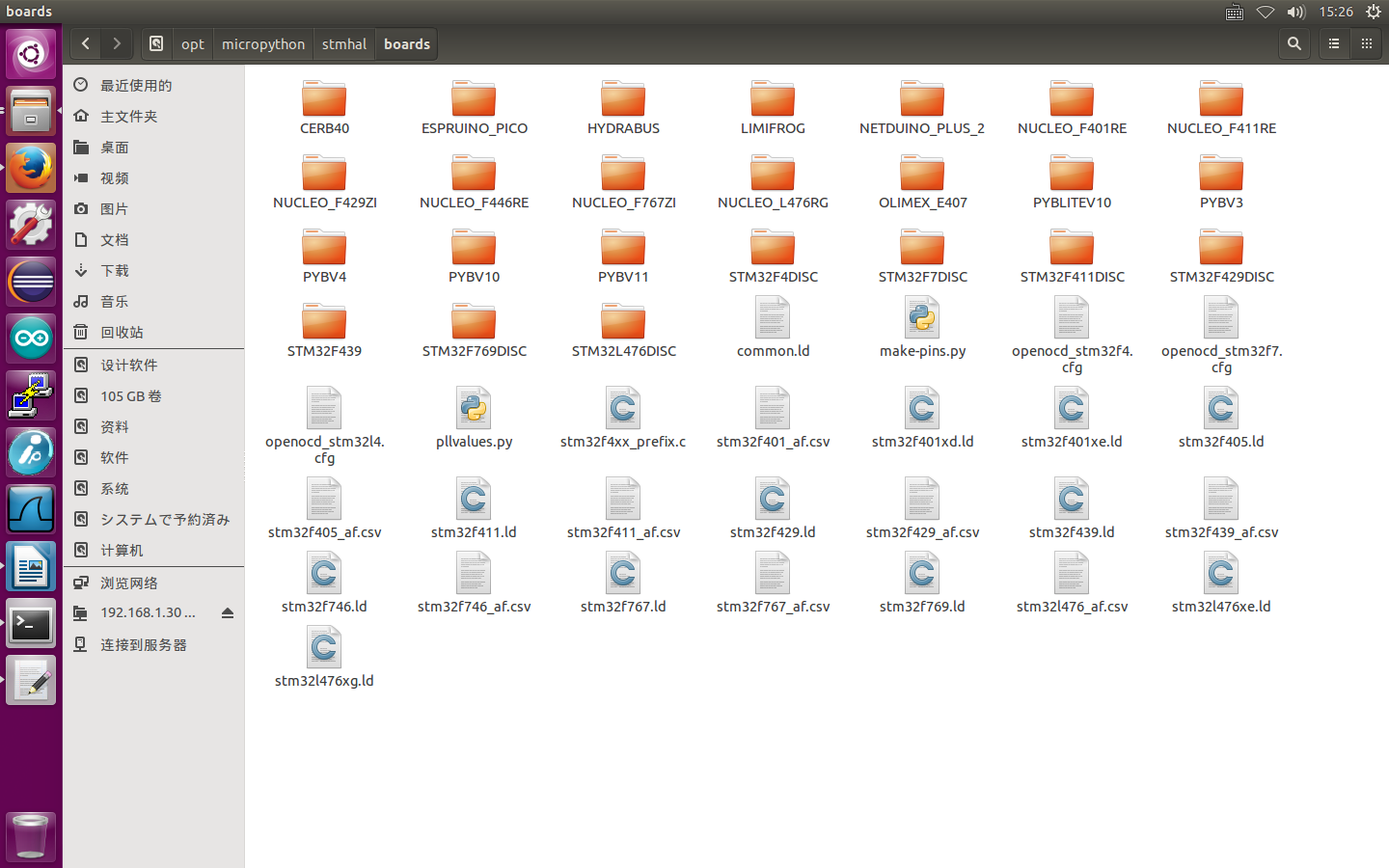
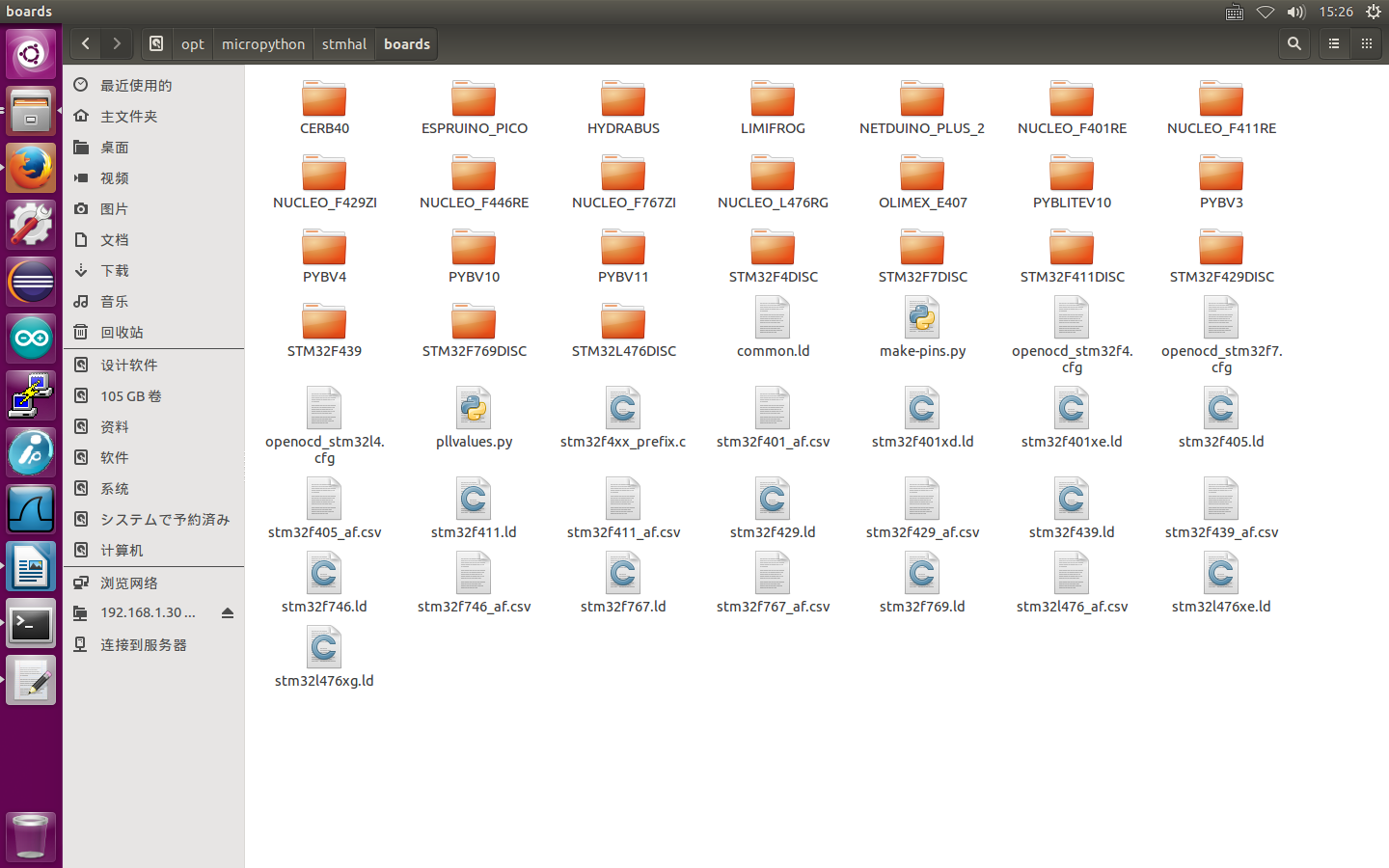
等待git完毕,进入stmhal/boards/目录下,里面又根据不同型号的芯片进行了分类。
3、开始编译
切换到stmhal目录
cd /opt/micropython/stmhal
执行编译命令,等待编译完成。
make BOARD=PYBV10
BOARD参数为stmhal/boards/目录下相应的开发板名称。
本次教程用的是TPYBoardv102(蓝色)开发板,兼容PYBV10,所以选择PYBV10开发板继续编译。
若是TPYBoardv102(绿色)基础板,同样选择PYBV10。
若是TPYBoardv102(黑色)开发板,需选择PYBV11。
编译成功。生成的固件文件stmhal/build-PYBV10/firmware.dfu和firmware.hex。
4、烧写固件
请参考教程:http://tpyboard.com/support/reference11/302.html
增加自定义类库
使用过micropython的小伙伴都知道,里面有一个重要的模块pyb。下面我们就尝试在micropython源码中新建一个名为tpyboard的pyb子类,里面添加一个简单的函数display,输出一句”HelloTPYBoard”。
5、首先大体来看一下stmhal目录下的各种.c和.h文件。基本上根据他们的名称就能判断出功能来。
6、先来参考一下led.c文件,了解一下大体的流程。
找到了led_obj_on函数,这就是我们平时用的pyb.LED(1).on()
/// Turn the LED on
mp_obj_t led_obj_on(mp_obj_t self_in) {
pyb_led_obj_t *self = self_in;
led_state(self->led_id, 1);
return mp_const_none;
}
声明注册一下on函数,MP_DEFINE_CONST_FUN_OBJ_1最后的数字跟参数的数量相对应。
STATIC MP_DEFINE_CONST_FUN_OBJ_1(led_obj_on_obj, led_obj_on);
再往下可以看到led_locals_dict_table,将上面声明的函数添加到led模块函数字典中。
STATIC const mp_rom_map_elem_t led_locals_dict_table[] = {
{ MP_ROM_QSTR(MP_QSTR_on), MP_ROM_PTR(&led_obj_on_obj) },
{ MP_ROM_QSTR(MP_QSTR_off), MP_ROM_PTR(&led_obj_off_obj) },
{ MP_ROM_QSTR(MP_QSTR_toggle), MP_ROM_PTR(&led_obj_toggle_obj) },
{ MP_ROM_QSTR(MP_QSTR_intensity), MP_ROM_PTR(&led_obj_intensity_obj) },
};
STATIC MP_DEFINE_CONST_DICT(led_locals_dict, led_locals_dict_table);
建立micropython对象,遵循以下原则。
const mp_obj_type_t pyb_led_type = {
{ &mp_type_type },
.name = MP_QSTR_LED,
.print = led_obj_print,
.make_new = led_obj_make_new,
.locals_dict = (mp_obj_dict_t*)&led_locals_dict,
};
7、接下来我们在stmhal目录下新建一个tpyboard.c文件,内容如下:
#include <stdio.h>
#include "py/nlr.h"
#include "py/runtime.h"
#include "py/mphal.h"
mp_obj_t tpyboard_obj_display() {
printf("Hello TPYBoard\n");
return mp_const_none;
}
STATIC MP_DEFINE_CONST_FUN_OBJ_0(tpyboard_obj_display_obj, tpyboard_obj_display);
STATIC const mp_rom_map_elem_t tpyboard_locals_dict_table[] = {
{ MP_ROM_QSTR(MP_QSTR_display), MP_ROM_PTR(&tpyboard_obj_display_obj) },
};
STATIC MP_DEFINE_CONST_DICT(tpyboard_locals_dict, tpyboard_locals_dict_table);
const mp_obj_type_t pyb_tpyboard_type = {
{ &mp_type_type },
.name = MP_QSTR_tpyboard,
.locals_dict = (mp_obj_dict_t*)&tpyboard_locals_dict,
};
8、新建tpyboard.h文件,内容如下:
extern const mp_obj_type_t pyb_tpyboard_type;
找到modpyb.c文件,将tpybaord子模块添加到pyb的pyb_module_globals_table[]子类表中。
{ MP_ROM_QSTR(MP_QSTR_tpyboard), MP_ROM_PTR(&pyb_tpyboard_type) },
记得在modpyb.c中添加tpyboard.h的引用。
#include "tpyboard.h"
9、添加完毕后,将tpyboard.c文件添加到Makefile文件中,进行编译。我就直接放到了led.c\下面。
SRC_C = \ main.c \ system_stm32.c \ stm32_it.c \ usbd_conf.c \ usbd_desc.c \ usbd_cdc_interface.c \ usbd_hid_interface.c \ usbd_msc_storage.c \ mphalport.c \ mpthreadport.c \ irq.c \ pendsv.c \ systick.c \ pybthread.c \ timer.c \ led.c \ tpyboard.c \ pin.c \ pin_defs_stmhal.c \ pin_named_pins.c \ bufhelper.c \ dma.c \ i2c.c \ spi.c \ uart.c \ can.c \ usb.c \ wdt.c \ gccollect.c \ help.c \ machine_i2c.c \ modmachine.c \ modpyb.c \ modstm.c \ moduos.c \ modutime.c \ modusocket.c \ modnetwork.c \ extint.c \ usrsw.c \ rng.c \ rtc.c \ flash.c \ storage.c \ sdcard.c \ fatfs_port.c \ lcd.c \ accel.c \ servo.c \ dac.c \ adc.c \ $(wildcard boards/$(BOARD)/*.c)
10、执行命令开始编译,编译通过,重新将编译好的固件烧写到TPYBoard开发板上。
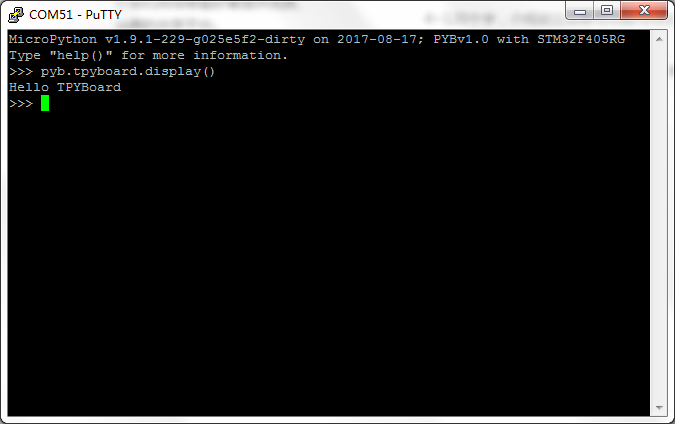
11、烧写完毕后,用putty连接TPYBoardv102,输入以下内容:
pyb.tpyboard.display()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号