
摘要:传统上,信息融合系统假定信息是通过专有的通信网络从已知的传感器收集的,并使用固定的信息融合规则和指定的计算资源和通信资源实现融合。无线传感器网络、支持TEDS(传感器电子数据表)的传统传感器、普适计算设备和IP下一代通用网络等新兴技术正在挑战传统信息融合系统的基本原理。Tae技术已经成熟到可以合理的根据环境发现传感器,建立相关性,查询适当的数据,并使用最适当的融合规则,以一种机会主义的方式使用无处不在的计算和通信环境。我们将这种融合系统定义为机会信息融合系统。本文介绍了信息融合的新模式,指出了设计、开发和部署下一代机会信息融合系统的可行方法和挑战。
一、介绍
多传感器数据/信息融合是一项迅速成熟的技术,涉及到如何将来自多个传感器的数据/信息组合起来服务于不同的应用。它是所有网络传感系统的核心组件,可用于: 连接或合并传感器产生的补充信息以获得更完整的图像;通过使用来自多个来源的传感器信息来减少或管理不确定性。
无线传感器网络等新兴技术,支持标准的传统传感器,普适的计算和通信系统、IP下一代网络等新兴技术引领了一个新的范式,传感器可以被视为一个共享的基础设施和公共资源可以同时服务于多个同步的信息融合应用程序。这与用于特定信息融合应用的专用的传感器、计算和通信基础设施形成了鲜明对比。共享计算和通信资源方面已经取得了重大进展。然而,在将传感器资源也作为共享资源方面却做得很少。因此,需要对传统的数据/信息融合模型、方法、中间件和技术进行增强/修改,与作为共享基础设施一部分的传感器一起工作。在这篇论文中,我们介绍了一种新的数据/信息融合范例——机会信息融合(OIF)范例——来处理这种多用途传感器网络和服务。此外,我们提出了实现下一代信息融合系统的几个挑战和创新。
二、新的OIF模型
在传统的信息融合中,JDL是最常用的模型,尤其在国防应用中,该模型将数据融合过程分解为0-4个层次,包括传感器信号处理,目标细化和跟踪,使用适当数据库增强态势、威胁和影响的评估,融合规则。JDL模型一个基本隐含假设是,传感器和相应的传感器模型是先验一直的,并且以专用的方式服务于特定的应用程序。因此,数据融合系统一旦被开发出来,就不能被重新部署服务于被构建的环境。当传感器、计算和通信称为共享基础设施,而没有合适的数据融合应用时,这种模型就不再适用了。
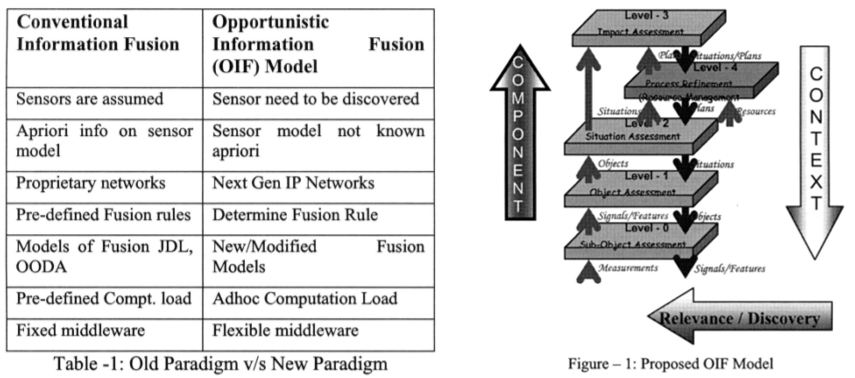
图一提出一种新的数据融合模型,定义为机会信息融合模型OIFM,来处理新范例中融合系统的挑战。扩展JDL模型来实现OIF的关键是在最底层建立相关性和启用传感器探索,并在所有数据融合过程中启用环境重配置。最近提出的JDL模型的增强并不支持这些过程。这种新的OIF模型将使共享基础设施模式的传感器同时为多个应用程序提供机会服务,并且为信息融合提供非零和收益。
传感器资源的发现可以通过文献[7]中提到的方法实现,利用传感器的自识别能力建立与应用的相关性。直到最近自我识别还不是传感器的内置功能,然而最近IEEE仪器和测量工作组提出了一个新的标准,使传感器具有自识别能力。
三、IEEE 1451标准和传感器电子数据表(TEDS)
OIF模型为数据融合系统的发展提供了一个框架,但从根本上讲,信息融合是通过某种不确定的推理框架在各层次的信息融合中进行数学处理的。最成功的数据融合技术之一是贝叶斯数据融合,它几乎在所有层次的数据融合中都有应用。
假设t是由传感器网络评估一个参数,例如温度。{Y1,...,Yk}代表传感器网络中传感器1-k测量集,问题的目标是用所有传感器的测量量获得未知参数t的最佳估计。在概率架构中,这个参数可以由条件密度估计出来
![]()
贝叶斯融合提供了一种非常优雅的方法从传感器测量中建立条件密度:
![]()
假设Y1,...,Yk是条件独立的,那么

上述公式称为贝叶斯融合规则。
似然P(Yi|t)封装了传感器的误差特性。因此捕获传感器不确定性特征的似然函数(或模糊隶属度函数)对信息融合的成功至关重要。传统信息融合系统使用已有先验似然函数的专用传感器。但是在OIF系统中,由于传感器是共享基础设施的一部分,并且不是先验已知的,所以关于似然函数的信息需要直接从传感器被发现时收集。
在传感网络环境下,当传感器以一种ad hoc方式加入或退出服务,如果传感器没有自我认知和传感器服务注册功能,那么它是微不足道的。传感器电子数据表TEDS是新的智能传感器接口标准IEEE 1451族的核心,这一标准由IEEE仪表和测量工作组为智能传感器接口和一组常见接口引入。TEDS包含了仪表和测量系统的关键信息来识别、表征、接口和正确使用来自智慧传感器的信号。这些关键特征在OIF环境中非常重要,因为其为网络中的传感器提供了自识别能力,对于传感器服务发现的机会方法非常重要。TEDS利用了表2所示的模板概念,定义了不同传感器类型的特定属性。基本TEDS领域具有所有重要信息,如制造商ID、传感器类型等,可以是能基于环境的传感器发现。本研究提出利用基本的TEDS和用户区域信息,结合环境输入来解决相关的传感器服务发现问题,从而开发新的传感器服务发现方法。
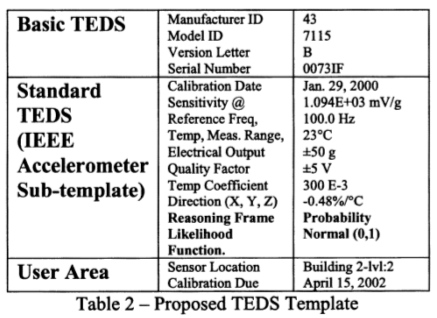
从贝叶斯融合规则中可以看出,似然信息需要直接从在发现中的传感器中收集。有时可以近似似然函数通过TEDS模板中现有的标准TEDS信息和传感器服务于信息融合应用的生成数据。但是这样的派生函数充其量只是近似,并可能导致错误的融合结果。由于这是真实的传感器误差特性,并且是传感器制造商的专有信息,所以最好是作为标准的一部分,并由传感器提供或制造商直接提供作为标准TEDS模板的一部分。由于目前批准的标准没有包含此类不确定描述函数,建议对标准TEDS字段进行以下整改,实现机会性信息融合,如图中粗体显示。
四、带有异构不确定性的机会信息融合
各TEDS领域内提供的不确定性测量为不确定测量的异构选择打开了大门。不确定性度量可以是不同近似推理框架中捕获和表示传感器测量的不确定性,例如概率、可能性(模糊)或置信度量之一。在这种情况下,网络数据或信息融合应用中的传感器可能会产生不同的不确定性测量。Oxenham、Challa和Moreland[8]的开创性著作提出了分布式信息融合方法来解决异构的不确定性测量,该方法使用内置的不确定性保留转换在不改变不确定性水平的情况下从一个不确定性推理框架移动到另一个。例如,Phillipe Smets提出的pignistic和逆pignistic转换用于融合前在概率和信度测量之间移动。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号