ros1-编译并启动仿真环境
1.安装noetic依赖
cd ~
mkdir catkin_ws
cd catkin_ws
mkdir src
下载此项目 https://github.com/6-robot/wpr_simulation 放入src目录
cd wpr_simulation
cd scripts
chmod +x ./install_for_noetic.sh
cd ~/catkin_ws/src/wpb_home/wpb_home_bringup/scripts
./install_for_noetic.sh
cd ~/catkin_ws/src/waterplus_map_tools/scripts
./install_for_noetic.sh
2.编译Ros工作空间
cd ~/catkin_src
catkin_make
source ~/catkin_ws/devel/setup.bash
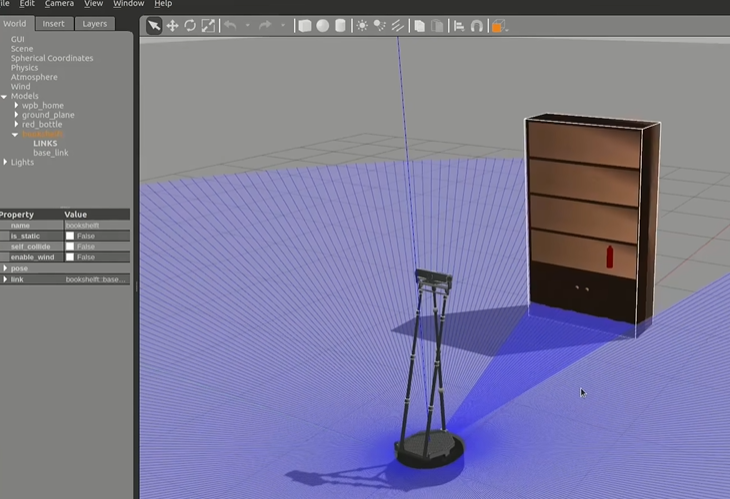
3.启动仿真器
roslaunch wpr_simulation wpb_simple.launch
4.安装并启动控制节点
sudo apt install ros-noetic-rgt-robot-steering
roscore #启动ros核心
rosrun rqt_robot_steering rqt_robot_steering #启动控制节点
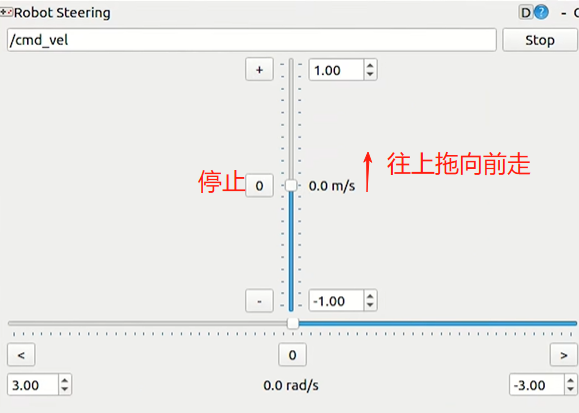
向上拖动控制滑杆控制小车前进速度,可以看到仿真器里的机器人向前运动了,点击 0 可以停止移动
启动rviz
rosrun rviz rviz
作者:xuejianxiyang
出处:http://xuejianxiyang.cnblogs.com
关于作者:Heaven helps those who help themselves.
本文版权归原作者和博客园共有,欢迎转载,但未经原作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号