
STM32 IAP 全部手写,亲测可用
本文原创,转载请注明出处:https://www.cnblogs.com/xl-blogs/articles/12831124.html
最近做了很多STM32的小板子,为了节省空间,程序下载接口做得比较简单,就导致了程序下载极不方便,同时,又需要通过总线对程序进行升级。因此,就产生了做一个在线升级的程序的想法。以前用过原子哥的IAP,原子哥的IAP是将程序文件完全接收再进行固件擦写,使用内存较大的板子还可以,但内存小了就不行了。因为最近使用的板子都是内存很小的,本次使用的是STM32F042G6U6,内存仅仅6KB,而FLASH有32KB,那么,将程序文件接收完成再进行擦写就是不可实现的了,所以,本次实验是一边接收一边擦写Flash。下面进入正题:
首先,需要有一个工程,这个大家自己处理,可以自己建,也可以找找别人的用。工程文件如下:
开始干正事的第一步,当然是先做Flash的读写。程序如下:
先贴上头文件中的函数声明和宏定义
#ifndef __MYIAP_H #define __MYIAP_H #include "stm32f0xx.h" #define MAX_FLASH_ADDR 0x08008000//最大芯片地址 #define APP_START_ADDR 0x08003000//从12K开始写 #define CHIP_FLASH_SIZE 0x00008000//flash大小为32K #define CHIP_PAGE_SIZE 0x00000400//扇区大小为1K #define NEEDCHECK 1 #define RUNAPP 1 #define RUNBOOTLOADER 0 u8 ReadRunFlag(u32 addr); u8 WriteRunFlag(u32 addr,u8 flag); u32 ReadWord(u32 addr); u8 WriteAppPack(u32 addr,u32 *dat,u16 len); void RunAPP(u32 addr); void IWDG_Init(u16 Reload); #endif
Flash读写部分:这里因为用作程序升级,所以限制了每次写最多写一个扇区大小,没有跨扇区操作,这样逻辑更加清晰,不易出错。每次写必须从扇区起始地址开始写,这样就可以不用读取和保存扇区原有内容,节省内存。可通过宏定义选择是否对写入的数据进行校验,检验就是直接逐字节读出来,和原数据做比较。
这段程序配合使用STM32 ST-LINK Utility,通过stlink来调试,可以任意写一些内容进去,通过STM32 ST-LINK Utility直接查看Flash中的内容,可以检查是否有误。
u8 CheckAddr(u32 addr) { if(addr<MAX_FLASH_ADDR&&addr>=APP_START_ADDR)//写入的地址比最大地址小,比起始地址大 { return 1; } return 0;//地址不合法 } u32 GetPageAddr(u32 addr)//获取当前地址的扇区首地址 { return addr-addr%CHIP_PAGE_SIZE; } u32 ReadWord(u32 addr) { return *(vu32*)addr; } u8 WriteAppPack(u32 addr,u32 *dat,u16 len) { if((len<<2)>CHIP_PAGE_SIZE) return 1;//失败,写入量大于一个扇区的尺寸(人为限制一次最多写入1个扇区) if(CheckAddr(addr)==0) return 2;//失败,地址错误 u32 pageaddr=GetPageAddr(addr); if(pageaddr!=addr) return 3;//失败,不是从扇区开头开始写 FLASH_Unlock();//解锁Flash if(FLASH_ErasePage(pageaddr)!=FLASH_COMPLETE)//擦除扇区 { FLASH_Lock(); return 4;//擦除失败 } for(u16 i=0;i<len;i++) { FLASH_ProgramWord(pageaddr+(i<<2),dat[i]); } FLASH_Lock(); #if NEEDCHECK//如果需要校验,则检验数据写入是否正确 for(u16 i=0;i<len;i++) { if(dat[i]!=ReadWord(pageaddr+(i<<2))) return 5;//失败,校验数据出错 } #endif return 0;//写入成功 }
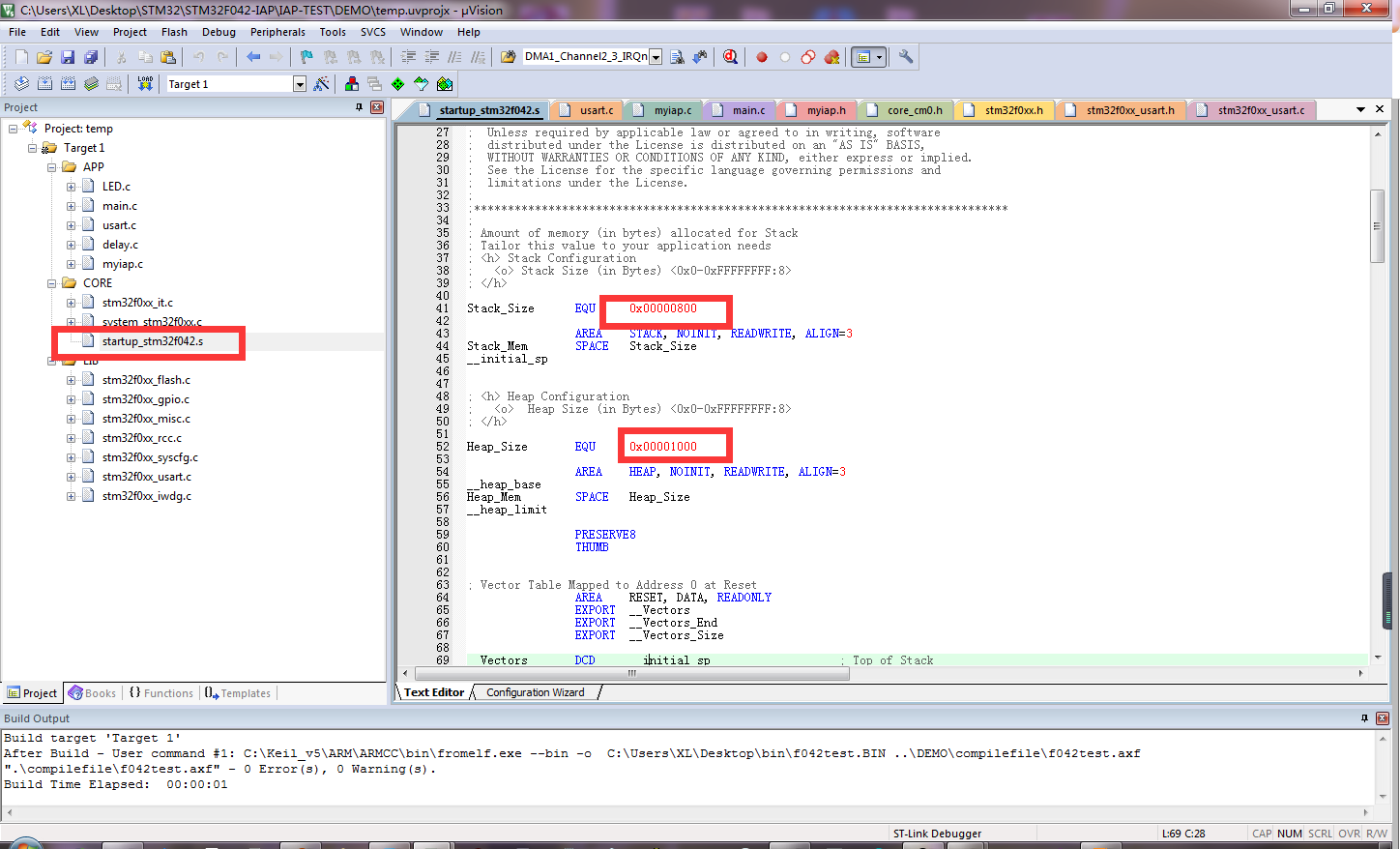
能够读写Flash过后,下一步就是UART的程序文件接收了。当然如果需要通过其他方式收发文件也是可以的,自己改就好了。首先定义两个1KB的大数组,一个用作串口接收buffer,另一个用于接受完成后的写入buffer(6KB这就去掉2KB了 哭)。这里需要注意的是,定义这种大数组,需要改一下启动文件中堆和栈的大小,不然内存会溢出,然后就是各种莫名其妙的问题。我这里直接把6KB的内存全部分给了堆和栈,不知道对不对,实际测试是没有问题的,堆和栈操作有点麻烦,我也是一知半解。
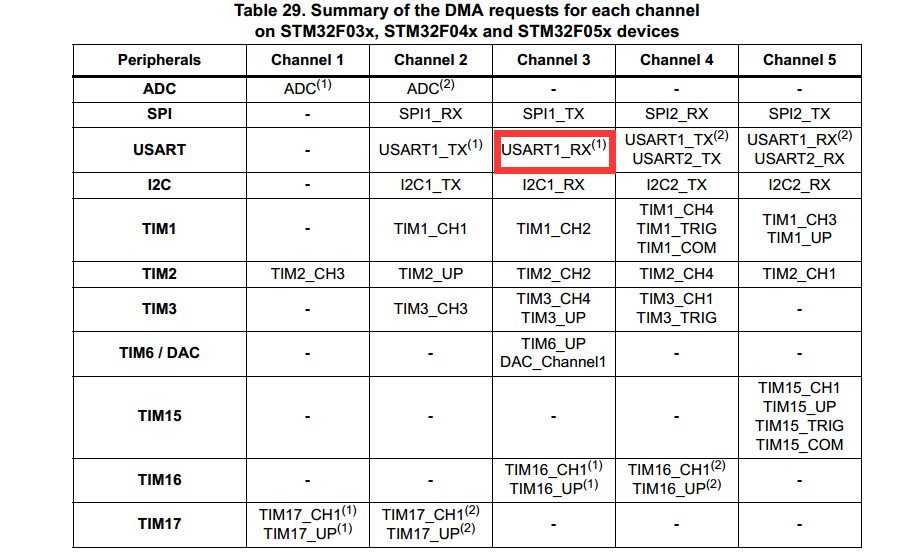
文件接收开启了串口DMA,为什么要开DMA呢?因为不开DMA就只能开串口接收中断来接收,在擦写Flash的时候,产生中断会导致擦写失败,如果此时关闭串口则又会丢失数据,难以两全。开启DMA传输后就没有这个问题了,DMA设置一次传输1KB,传输完拷贝出来然后直接写Flash,写的同时由DMA自动接收下一包的数据。
DMA初始化程序如下:
extern u8 buffer[1024]; void Usart1_Rx_DMA_Init(void) { NVIC_InitTypeDef NVIC_InitStructure; DMA_InitTypeDef DMA_InitStructure; RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE); DMA_DeInit(DMA1_Channel3); /* 配置 DMA Stream */ DMA_InitStructure.DMA_BufferSize=1024; DMA_InitStructure.DMA_DIR=DMA_DIR_PeripheralSRC; DMA_InitStructure.DMA_M2M=DMA_M2M_Disable; DMA_InitStructure.DMA_MemoryBaseAddr=(u32)buffer; DMA_InitStructure.DMA_MemoryDataSize=DMA_PeripheralDataSize_Byte; DMA_InitStructure.DMA_MemoryInc=DMA_MemoryInc_Enable; DMA_InitStructure.DMA_Mode=DMA_Mode_Circular; DMA_InitStructure.DMA_PeripheralBaseAddr=(u32)&USART1->RDR; DMA_InitStructure.DMA_PeripheralDataSize=DMA_PeripheralDataSize_Byte; DMA_InitStructure.DMA_PeripheralInc=DMA_PeripheralInc_Disable; DMA_InitStructure.DMA_Priority=DMA_Priority_Medium; DMA_Init(DMA1_Channel3, &DMA_InitStructure); DMA_ITConfig(DMA1_Channel3, DMA_IT_TC, ENABLE);//开启相关中断 DMA_ClearFlag(DMA1_FLAG_TC3); //Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = DMA1_Channel2_3_IRQn;//串口1中断通道 NVIC_InitStructure.NVIC_IRQChannelPriority=1;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、 USART_DMACmd(USART1,USART_DMAReq_Rx,ENABLE); DMA_Cmd(DMA1_Channel3, DISABLE); DMA_SetCurrDataCounter(DMA1_Channel3,1024); DMA_Cmd(DMA1_Channel3, ENABLE); }
DMA通道可以在参考手册上查到
DMA接收中断程序中,拷贝当前接收到的数据,同时标记已经接收到一包数据
u8 packflag=0; u32 data[256]; u8 Timout=0; u8 buffer[1024]; void DMA1_Channel2_3_IRQHandler(void) { if(DMA_GetITStatus(DMA1_IT_TC3)==SET) { memcpy(data,buffer,1024);//接收完成1K,立即拷贝出来 packflag=1;//标记一包数据接收完成 Timout=0;//接收超时计数重置 DMA_ClearITPendingBit(DMA1_IT_TC3); } }
这个Timout有什么作用呢?这个是用来接收最后一包数据的,我们发送的程序文件基本上不可能刚好1024的整数倍,所以最后一包一般情况下式小于1024Bytes的,所以也就不会产生DMA接收中断。那么此时,我们发现很长时间了(也不是很长)都没有接收到新的一包数据,那么说明接收完成了,最后一包不足1KB。
下面是接收到包的写入处理,这部分程序放在主程序中。可以看到,主程序中一直判断,如果接收到了一包数据,则立即将其写入Flash,并且把写入缓存(data数组)全部重置为0xFF。
if(packflag)
{
cmdflag=0;
startflag=1;
packflag=0;
printf("第%d包:",packs);
printf("%d\r\n",WriteAppPack(APP_START_ADDR+packs*1024,data,256));
packs++;
memset(data,0xFF,1024);
IWDG_ReloadCounter();
}
t++;
if(t==500000)
{
if(startflag==0&&DMA_GetCurrDataCounter(DMA1_Channel3)<1024)//接收未开始,但接收到了数据
{
cmdflag++;
if(cmdflag==2)//多次判断结果相同,说明接收到了指令
{
cmdflag=0;
if(strstr((char *)buffer,"download\r\n"))//接收到download指令,则重新开始接收APP
{
startflag=0;
packs=0;
memset(data,0xFF,1024);
Timout=0;
packflag=0;
printf("请发送程序\r\n");
}
else if(strstr((char *)buffer,"runapp\r\n"))//接收到runapp指令,则执行现有程序
{
printf("执行程序\r\n");
if(WriteRunFlag(APP_START_ADDR-1024,RUNAPP))//写入执行APP的标志成功
{
IWDG_Init(1);//重新初始化看门狗,让单片机复位,完全释放单片机资源,准备执行新程序
delay_ms(10);
}
else
{
printf("运行标志写入失败\r\n");
}
}
DMA_Cmd(DMA1_Channel3, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel3,1024);
DMA_Cmd(DMA1_Channel3, ENABLE);
}
}
IWDG_ReloadCounter();
if(startflag)
{
Timout++;
if(Timout==3)
{
Timout=0;
u16 lastpacklen=1024-DMA_GetCurrDataCounter(DMA1_Channel3);
memcpy(data,buffer,lastpacklen);
printf("第%d包:%d\r\n",packs,WriteAppPack(APP_START_ADDR+packs*1024,(u32*)data,(u16)(lastpacklen+3)/4));
printf("写入完成,总大小%dBytes\r\n",packs*1024+lastpacklen);
packs=0;
memset(data,0xFF,1024);
startflag=0;
if(WriteRunFlag(APP_START_ADDR-1024,RUNAPP))//写入执行APP的标志成功
{
IWDG_Init(1);//重新初始化看门狗,让单片机复位,完全释放单片机资源,准备执行新程序
delay_ms(10);
}
else
{
printf("运行标志写入失败\r\n");
}
DMA_Cmd(DMA1_Channel3, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel3,1024);
DMA_Cmd(DMA1_Channel3, ENABLE);
}
}
t=0;
led=!led;
LED(led);
}
到上一步,程序文件就已经可以接收并且写入完成了,剩下的就是执行。控制程序执行的部分代码如下:
u8 ReadRunFlag(u32 addr) { if(ReadWord(addr)==0x1234abcd) { return RUNAPP; } return RUNBOOTLOADER; } u8 WriteRunFlag(u32 addr,u8 flag) { u32 cmd; FLASH_Unlock();//Flash解锁 if(FLASH_ErasePage(GetPageAddr(addr))!=FLASH_COMPLETE)//擦除扇区 { FLASH_Lock(); return 0;//擦除失败 } if(flag==RUNAPP) { cmd=0x1234abcd;//运行APP } else { cmd=0xabcd1234;//运行BootLoader } FLASH_ProgramWord(addr,cmd); FLASH_Lock();//Flash上锁 if(ReadWord(addr)==cmd)//校验通过,写入标志成功 { return 1; } return 0; } __asm void MSR_MSP(u32 addr) { MSR MSP, r0 //set Main Stack value BX r14 } typedef void (*iap)(void); void RunAPP(u32 addr) { if(((*(vu32*)addr)&0x2FFE0000)==0x20000000) //检查栈顶地址是否合法. { iap app; app=(iap)*(vu32*)(addr+4); //用户代码区第二个字为程序开始地址(复位地址) MSR_MSP(*(vu32*)addr); //初始化APP堆栈指针(用户代码区的第一个字用于存放栈顶地址) app(); } }
运行程序的思路是将程序执行地址包装成一个函数,通过调用函数使程序调到APP的执行首地址,同时将堆栈初始化,APP程序就可以正常运行了。那么在运行程序后,下一次怎么下载程序,下一次单片机复位过后又怎么执行APP。那就需要添加一些指令,比如正在执行APP,如果向串口发送一个“download\r\n”指令,则APP复位到BootLoader中去,准备接收新的APP程序,同时,如果正在执行BootLoader程序,此时Flash中是有完整APP程序的,那么也可以通过发送“runapp\r\n”指令来跳转到APP程序执行。如果需要上电复位后,程序就执行APP怎么办呢?在这里我添加了一个程序执行标志,每次切换APP和BootLoader时,都将新的标志写入Flash,这样就可以在上电的时候,在BootLoader程序的开头,就先判断应该执行哪个程序,这样就可以上电直接快速执行APP程序了。
代码如下:
Key_Init(); if(KEY&&ReadRunFlag(APP_START_ADDR-1024)==RUNAPP)//如果没有按键,且标志位指示执行APP,则执行APP(按键上电可强制执行BootLoader) { RunAPP(APP_START_ADDR); } else if(KEY==0) { WriteRunFlag(APP_START_ADDR-1024,RUNBOOTLOADER); }
这里按键的作用是,如果APP程序卡死了,不能通过发送指令来复位到BootLoader,那么也可以通过按着键上电的方式来强制进入BootLoader。
程序接受完成,执行APP的时候,首先需要对单片机进行复位,单片机可以实现软复位,但软复位似乎有些问题(之前遇到过),这次直接采用硬件复位的方式,即开一个看门狗,设置很短的周期,然后又不喂狗,看门狗就会产生一个硬件复位电平,以此来达到复位的目的。在APP程序中也必须加入接收指令并复位的功能。
BootLoader部分程序就差不多了,上述代码为了叙述的逻辑,部分被拆散了,下面贴上完整代码。
主程序:
#include "main.h" u8 packflag=0; u32 data[256]; u8 Timout=0; u8 buffer[1024]; void DMA1_Channel2_3_IRQHandler(void) { if(DMA_GetITStatus(DMA1_IT_TC3)==SET) { memcpy(data,buffer,1024);//接收完成1K,立即拷贝出来 packflag=1;//标记一包数据接收完成 Timout=0;//接收超时计数重置 DMA_ClearITPendingBit(DMA1_IT_TC3); } } int main(void) { u8 led=0; u8 startflag=0; u32 t=0; u8 cmdflag=0; Key_Init(); if(KEY&&ReadRunFlag(APP_START_ADDR-1024)==RUNAPP)//如果没有按键,且标志位指示执行APP,则执行APP(按键上电可强制执行BootLoader) { RunAPP(APP_START_ADDR); } else if(KEY==0) { WriteRunFlag(APP_START_ADDR-1024,RUNBOOTLOADER); } delay_init(48); LED_Init();//LED初始化,红灯为故障指示灯,绿灯为工作状态及ID指示灯 uart1_init(115200);//串口初始化,应放在前面,波特率待定 Usart1_Rx_DMA_Init(); memset(data,0xFF,1024); printf("BootLoader\r\n"); IWDG_Init(2000); u8 packs=0; while(1) { if(packflag) { cmdflag=0; startflag=1; packflag=0; printf("第%d包:",packs); printf("%d\r\n",WriteAppPack(APP_START_ADDR+packs*1024,data,256)); packs++; memset(data,0xFF,1024); IWDG_ReloadCounter(); } t++; if(t==500000) { if(startflag==0&&DMA_GetCurrDataCounter(DMA1_Channel3)<1024)//接收未开始,但接收到了数据 { cmdflag++; if(cmdflag==2)//多次判断结果相同,说明接收到了指令 { cmdflag=0; if(strstr((char *)buffer,"download\r\n"))//接收到download指令,则重新开始接收APP { startflag=0; packs=0; memset(data,0xFF,1024); Timout=0; packflag=0; printf("请发送程序\r\n"); } else if(strstr((char *)buffer,"runapp\r\n"))//接收到runapp指令,则执行现有程序 { printf("执行程序\r\n"); if(WriteRunFlag(APP_START_ADDR-1024,RUNAPP))//写入执行APP的标志成功 { IWDG_Init(1);//重新初始化看门狗,让单片机复位,完全释放单片机资源,准备执行新程序 delay_ms(10); } else { printf("运行标志写入失败\r\n"); } } DMA_Cmd(DMA1_Channel3, DISABLE); DMA_SetCurrDataCounter(DMA1_Channel3,1024); DMA_Cmd(DMA1_Channel3, ENABLE); } } IWDG_ReloadCounter(); if(startflag) { Timout++; if(Timout==3) { Timout=0; u16 lastpacklen=1024-DMA_GetCurrDataCounter(DMA1_Channel3); memcpy(data,buffer,lastpacklen); printf("第%d包:%d\r\n",packs,WriteAppPack(APP_START_ADDR+packs*1024,(u32*)data,(u16)(lastpacklen+3)/4)); printf("写入完成,总大小%dBytes\r\n",packs*1024+lastpacklen); packs=0; memset(data,0xFF,1024); startflag=0; if(WriteRunFlag(APP_START_ADDR-1024,RUNAPP))//写入执行APP的标志成功 { IWDG_Init(1);//重新初始化看门狗,让单片机复位,完全释放单片机资源,准备执行新程序 delay_ms(10); } else { printf("运行标志写入失败\r\n"); } DMA_Cmd(DMA1_Channel3, DISABLE); DMA_SetCurrDataCounter(DMA1_Channel3,1024); DMA_Cmd(DMA1_Channel3, ENABLE); } } t=0; led=!led; LED(led); } } }
IAP.c
#include "myiap.h" void IWDG_Init(u16 Reload) { IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable); IWDG_SetPrescaler(IWDG_Prescaler_8);//4分频有问题,看门狗不工作 IWDG_SetReload(Reload); IWDG_ReloadCounter(); IWDG_Enable(); } u8 CheckAddr(u32 addr) { if(addr<MAX_FLASH_ADDR&&addr>=APP_START_ADDR)//写入的地址比最大地址小,比起始地址大 { return 1; } return 0;//地址不合法 } u32 GetPageAddr(u32 addr)//获取当前地址的扇区首地址 { return addr-addr%CHIP_PAGE_SIZE; } u32 ReadWord(u32 addr) { return *(vu32*)addr; } u8 WriteAppPack(u32 addr,u32 *dat,u16 len) { if((len<<2)>CHIP_PAGE_SIZE) return 1;//失败,写入量大于一个扇区的尺寸(人为限制一次最多写入1个扇区) if(CheckAddr(addr)==0) return 2;//失败,地址错误 u32 pageaddr=GetPageAddr(addr); if(pageaddr!=addr) return 3;//失败,不是从扇区开头开始写 FLASH_Unlock();//解锁Flash if(FLASH_ErasePage(pageaddr)!=FLASH_COMPLETE)//擦除扇区 { FLASH_Lock(); return 4;//擦除失败 } for(u16 i=0;i<len;i++) { FLASH_ProgramWord(pageaddr+(i<<2),dat[i]); } FLASH_Lock(); #if NEEDCHECK//如果需要校验,则检验数据写入是否正确 for(u16 i=0;i<len;i++) { if(dat[i]!=ReadWord(pageaddr+(i<<2))) return 5;//失败,校验数据出错 } #endif return 0;//写入成功 } u8 ReadRunFlag(u32 addr) { if(ReadWord(addr)==0x1234abcd) { return RUNAPP; } return RUNBOOTLOADER; } u8 WriteRunFlag(u32 addr,u8 flag) { u32 cmd; FLASH_Unlock();//Flash解锁 if(FLASH_ErasePage(GetPageAddr(addr))!=FLASH_COMPLETE)//擦除扇区 { FLASH_Lock(); return 0;//擦除失败 } if(flag==RUNAPP) { cmd=0x1234abcd;//运行APP } else { cmd=0xabcd1234;//运行BootLoader } FLASH_ProgramWord(addr,cmd); FLASH_Lock();//Flash上锁 if(ReadWord(addr)==cmd)//校验通过,写入标志成功 { return 1; } return 0; } __asm void MSR_MSP(u32 addr) { MSR MSP, r0 //set Main Stack value BX r14 } typedef void (*iap)(void); void RunAPP(u32 addr) { if(((*(vu32*)addr)&0x2FFE0000)==0x20000000) //检查栈顶地址是否合法. { iap app; app=(iap)*(vu32*)(addr+4); //用户代码区第二个字为程序开始地址(复位地址) MSR_MSP(*(vu32*)addr); //初始化APP堆栈指针(用户代码区的第一个字用于存放栈顶地址) app(); } }
USART.C
#include "usart.h" #include "string.h" #include "stdlib.h" int fputc(int ch, FILE *f) { while((USART1->ISR&0X40)==0);//循环发送,直到发送完毕 USART1->TDR = (u8) ch; while((USART1->ISR&0X40)==0); return ch; } void uart1_init(u32 bound) { //GPIO端口设置 GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB,ENABLE); //使能GPIOA时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟 //串口1对应引脚复用映射 GPIO_PinAFConfig(GPIOB,GPIO_PinSource6,GPIO_AF_0); //GPIOA9复用为USART1 GPIO_PinAFConfig(GPIOB,GPIO_PinSource7,GPIO_AF_0); //GPIOA10复用为USART1 //USART1端口配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //GPIOA9与GPIOA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉 GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //GPIOA9与GPIOA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉 GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化PA9,PA10 //USART1 初始化设置 USART_InitStructure.USART_BaudRate = bound;//波特率设置 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口1 USART_Cmd(USART1, ENABLE); //使能串口1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断 //Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道 NVIC_InitStructure.NVIC_IRQChannelPriority=0;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、 } void uart2_init(u32 bound) { //GPIO端口设置 GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA,ENABLE); //使能GPIOA时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//使能USART1时钟 //串口1对应引脚复用映射 GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_1); //GPIOA9复用为USART1 GPIO_PinAFConfig(GPIOA,GPIO_PinSource3,GPIO_AF_1); //GPIOA10复用为USART1 //USART1端口配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //GPIOA9与GPIOA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉 GPIO_Init(GPIOA,&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //GPIOA9与GPIOA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉 GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10 //USART1 初始化设置 USART_InitStructure.USART_BaudRate = bound;//波特率设置 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART2, &USART_InitStructure); //初始化串口1 USART_Cmd(USART2, ENABLE); //使能串口1 //USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启相关中断 //Usart1 NVIC 配置 // NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//串口1中断通道 // NVIC_InitStructure.NVIC_IRQChannelPriority=0;//抢占优先级3 // NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 // NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、 } void USART1_IRQHandler(void) { if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) { USART_ReceiveData(USART1); USART_ClearITPendingBit(USART1,USART_IT_RXNE); } } void USART2_IRQHandler(void) { if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) { USART_ReceiveData(USART2); USART_ClearITPendingBit(USART2,USART_IT_RXNE); } } extern u8 buffer[1024]; void Usart1_Rx_DMA_Init(void) { NVIC_InitTypeDef NVIC_InitStructure; DMA_InitTypeDef DMA_InitStructure; RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE); DMA_DeInit(DMA1_Channel3); /* 配置 DMA Stream */ DMA_InitStructure.DMA_BufferSize=1024; DMA_InitStructure.DMA_DIR=DMA_DIR_PeripheralSRC; DMA_InitStructure.DMA_M2M=DMA_M2M_Disable; DMA_InitStructure.DMA_MemoryBaseAddr=(u32)buffer; DMA_InitStructure.DMA_MemoryDataSize=DMA_PeripheralDataSize_Byte; DMA_InitStructure.DMA_MemoryInc=DMA_MemoryInc_Enable; DMA_InitStructure.DMA_Mode=DMA_Mode_Circular; DMA_InitStructure.DMA_PeripheralBaseAddr=(u32)&USART1->RDR; DMA_InitStructure.DMA_PeripheralDataSize=DMA_PeripheralDataSize_Byte; DMA_InitStructure.DMA_PeripheralInc=DMA_PeripheralInc_Disable; DMA_InitStructure.DMA_Priority=DMA_Priority_Medium; DMA_Init(DMA1_Channel3, &DMA_InitStructure); DMA_ITConfig(DMA1_Channel3, DMA_IT_TC, ENABLE);//开启相关中断 DMA_ClearFlag(DMA1_FLAG_TC3); //Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = DMA1_Channel2_3_IRQn;//串口1中断通道 NVIC_InitStructure.NVIC_IRQChannelPriority=1;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、 USART_DMACmd(USART1,USART_DMAReq_Rx,ENABLE); DMA_Cmd(DMA1_Channel3, DISABLE); DMA_SetCurrDataCounter(DMA1_Channel3,1024); DMA_Cmd(DMA1_Channel3, ENABLE); }
BootLoader程序完成过后,就可以写一个测试APP测试了。下面是测试程序的配置及程序下载的方式:
首先需要对测试APP工程进行配置
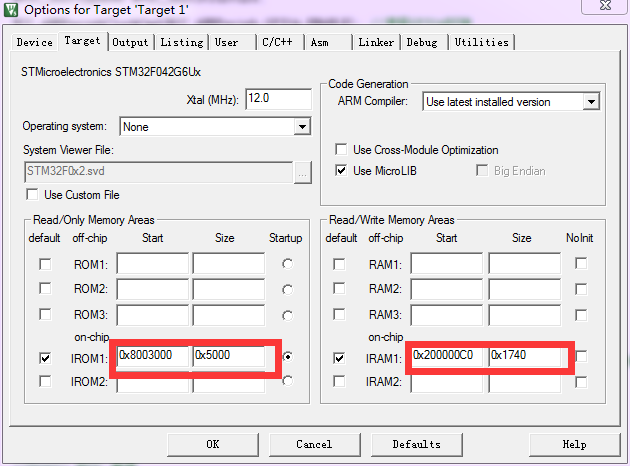

这里有两点:第一点是设置Flash的其实地址和大小,因为BootLoader是从0x8000000开始的,所以这里应该为BootLoader保留一定的控件,所以设置成0x8003000,保留12K空间,实际保留大小需根据BootLoader程序大小来确定,Size则为剩余大小。第二点是RAM,RAM起始地址需要保存中断向量表,为了不被程序修改,这里将其起始地址改掉。
下一步则是生成BIN文件,在配置中如下位置:

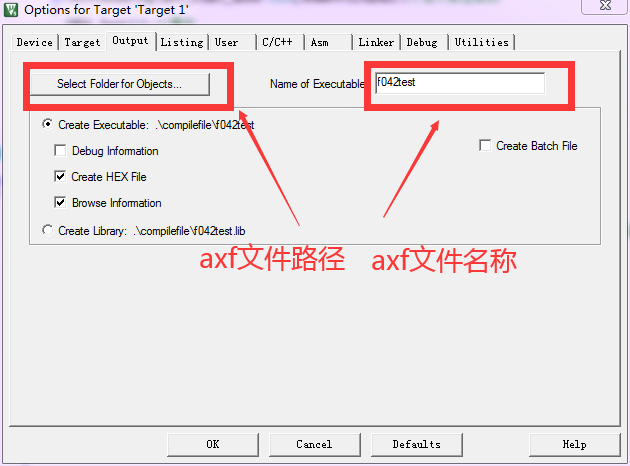
勾选Run #1 框内内容按如下格式填:C:\Keil_v5\ARM\ARMCC\bin\fromelf.exe --bin -o C:\Users\XL\Desktop\bin\f042test.BIN ..\DEMO\compilefile\f042test.axf
有三个路径,第一个是电脑上安装KEIL的fromelf.exe的位置,编译时调用此程序生成BIN文件;第二个路径是生成的BIN文件放在哪里,我这里在桌面专门建了一个文件夹存放BIN文件,方便多个程序升级;第三个路径则是此工程目录下,编译生成的axf文件的位置,fromelf.exe程序通过此axf文件来生成BIN文件,这个路径修改参照下图。
配置完成后,在程序中添加两条,第一条是中断向量偏移,放在程序开头,第二条是接收指令并复位。
主函数如下:
#include "main.h" u8 buffer[1024]; u16 count=0; void USART1_IRQHandler(void) { if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) { buffer[count++]=USART_ReceiveData(USART1); if(buffer[count-1]==0x0a&&buffer[count-2]==0x0d)//接收到回车 { count=0; if(strstr((char *)buffer,"download\r\n"))//接收到程序下载指令 { if(WriteRunFlag(APP_START_ADDR-1024,RUNBOOTLOADER))//写入标志成功 { IWDG_Init(1);//复位 } else { printf("写入标志失败\r\n"); } } } USART_ClearITPendingBit(USART1,USART_IT_RXNE); } } int main(void) { /*中断向量表偏移*/ //若芯片为F1及以上,可将如下两条语句换为此语句:SCB->VTOR = FLASH_BASE | 0x3000; memcpy((void*)0x20000000, (void*)0x08003000, 192);//startup_stm32f042.s文件中,数中断服务函数为48个,48*4=192 SYSCFG_MemoryRemapConfig(SYSCFG_MemoryRemap_SRAM); u8 led=0; u32 t=0; delay_init(48); LED_Init();//LED初始化,红灯为故障指示灯,绿灯为工作状态及ID指示灯 uart1_init(115200);//串口初始化,应放在前面,波特率待定 printf("APP运行中\r\n"); while(1) { t++; if(t==5000000) { printf("OK\r\n"); t=0; led=!led; LED(led); } } }
好了,到这里我们的程序和配置就全部完成了,就可以开始在线升级程序了。
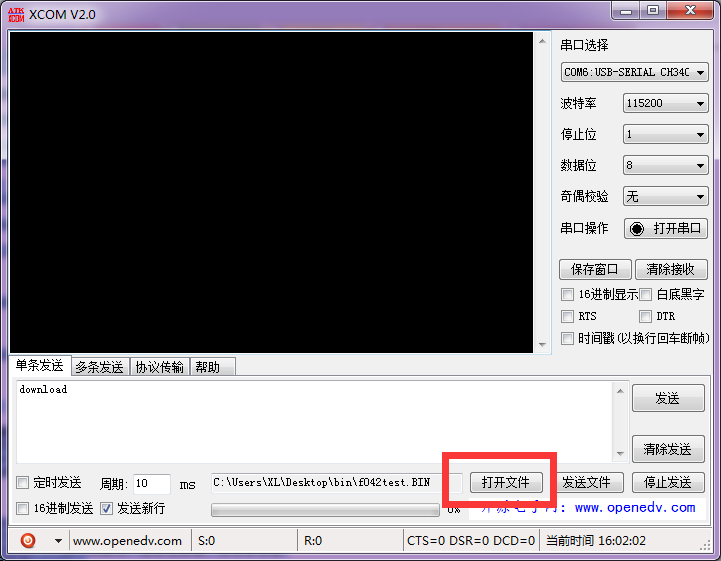
升级程序可以直接通过串口助手发送文件就可以了。操作流程如下:
打开串口助手,打开生成的BIN文件,如果此时程序正在运行BootLoader,则可以直接点击发送,如果此时程序在运行APP,则发送download\r\n(download+换行符),程序就会跳转到BootLoader中,然后点击发送文件。串口会打印提示信息,提示文件是否接收完成,程序APP是否执行成功。

到这里,串口IAP升级程序就全部完成了,就可以通过串口助手来下载程序,下载速度会比stlink,jlink还快很多,当然稳定性肯定比不上,但是使用有线串口连接基本没问题,使用无线连接则要考虑无线收发模块有没有额外的信息和丢包(意思是可以搞无线下载哦,亲测过)。程序全部是属于原创,当然参考资料还是看了不少的,有从正点原子看一些例程,也有网上其他博文解决的一些其他问题。整个程序大概搞了一天左右,如果有需要的话请自便,大家可以拿去修修改改。当然如果大家发现有什么不对或者不太好的地方,希望大家提出来,相互交流。另外,转载的话请注明出处哦!https://www.cnblogs.com/xl-blogs/articles/12831124.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号