
SLAM环境配置:Ubuntu16.04+Clion+Eigen+Ceres+g2o+Sophus+PCL+OpenCV+测试代码
1、
https://blog.csdn.net/yunlaowang/article/details/90512976
ros2go中,eigen、pcl以及opencv已经自带,无需安装
2、安装NVIDIA驱动
https://zhuanlan.zhihu.com/p/59618999
sudo apt-get updata //查看前先updata一下 ubuntu-drivers devices //查看硬件信息 sudo ubuntu-drivers autoinstall //安装驱动
3、安装nomachine
自带安装包安装即可
4、安装roboware
自带安装包安装
5、安装chrome
6、安装timeshift保命
https://linux.cn/article-11619-1.html
7、安装录屏软件simplescreenrecorder
sudo apt-get install simplescreenrecorder
遇到的问题:
1、g2o编译报错问题
https://blog.csdn.net/yangziluomu/article/details/72622225
通用问题
https://blog.csdn.net/qq_38204686/article/details/114949748
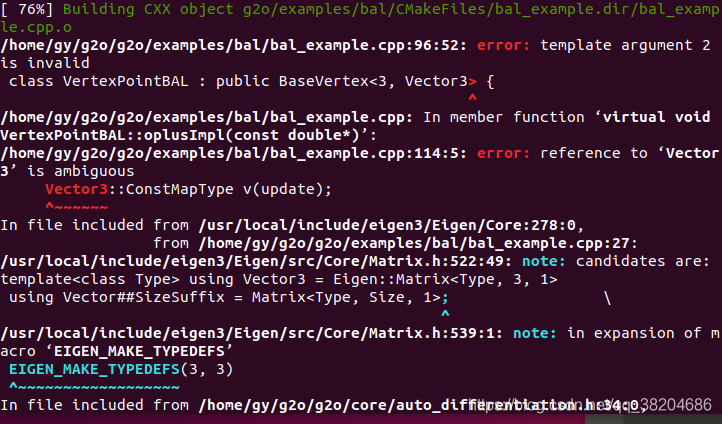
解决方案:不编译它 .. (暂没有找到更好的方案)
可找到g2o/g2o/CMakeLists.txt 注释或删除相关行 如下图:

2、关于ros必要包的安装(持续更新)
1、csm
sudo apt-get install ros-melotic-csm

 浙公网安备 33010602011771号
浙公网安备 33010602011771号