
强化学习读书笔记 -- 第十二章有效循迹
有效循迹是强化学习中的一个重要机制。几乎所有的时序差分(TD)学习方法都可以与之结合来提升学习效率,例如Sarsa算法、Q-learning算法。有效循迹方法将蒙特卡洛(MC)方法与TD方法相结合,使得MC方法同样可以采用逐步更新的方式,传统的蒙特卡洛MC方法需要到终止状态才进行更新。有效循迹方法具有较好的计算优势(因为采取递推的形式),它将短期记忆向量--有效循迹\(z_t\in\R^d\)与长期记忆向量--参数向量\(w_t\in\R^d\)相结合,例如与传统\(n\)步方法相比,有效循迹的主要计算优势在于只需要存储单个循迹向量,而不需要存储\(n\)个状态特征向量。
上面介绍了有效循迹方法的优点。这里介绍有效循迹的思想。本书前面介绍的大部分算法都是前向视角,通过估计未来一步或者多步的状态价值来更新当前的价值。但是有效循迹方法是一种后向视角算法,将数据回溯进行更新,并与前向TD算法相结合,可以得到更加强大的强化学习算法。
1.\(\lambda\)-回报
回顾\(n\)步回报的定义为
其中,\(\hat{v}(s,w)\)表示基于参数\(w\)的状态\(s\)的估计价值。\(T\)表示终止状态的时刻。
\(\lambda\)-回报是不同步数回报的加权平均,例如\(\frac{1}{2}G_{t:t+2}+\frac{1}{2}G_{t:t+4}\)。为了保证回报统计性质不变,即\(\mathbb{E}[G_t]=v(s_t)\),权重之和应该为1。直接将\(\lambda\)-回报替换目标状态价值,直接应用于本书前面所提到的强化学习方法中,通常称为复合更新(compound update)。当与TD算法相结合也称为\(TD(\lambda)\)算法,该算法也是前向视角。定义理想情况下的\(\lambda\)-回报为
分析一下式(12.1),复合更新只有当最长累积回报计算得到后才能进行。\(\lambda\)-回报中的权重随着步数增加而逐渐减小,其系数变化曲线如下图所示。(这里个人觉得应该倒过来更合适,因为步长越长得到的估计结果越接近蒙特卡洛采样,具有无偏性。但是不适用与无穷轨迹长度的情况,可以尝试改进。)
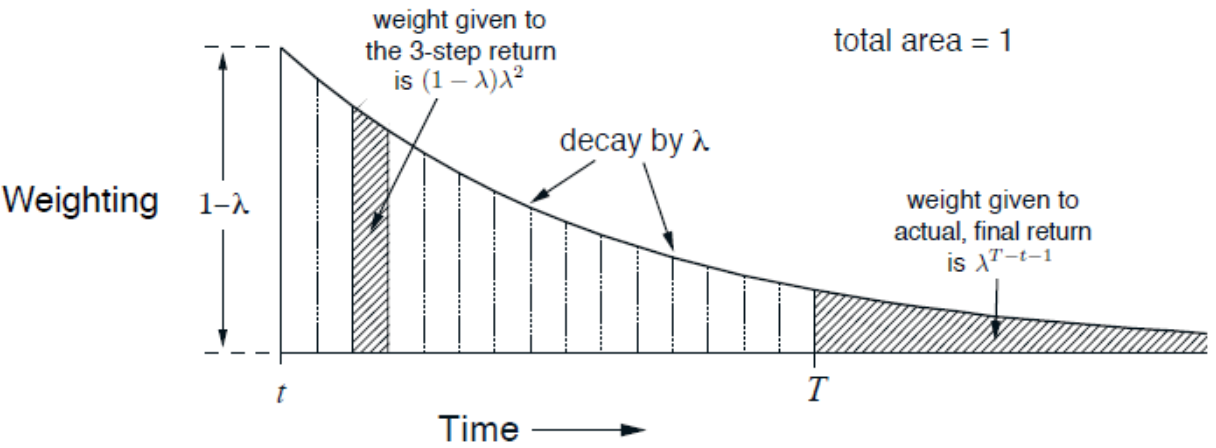
在实际应用中,为了避免更新延迟过大应该设定最大步长。定义含终止状态的\(\lambda\)-回报为
当\(\lambda=0\),\(G_t^\lambda=G_{t:t+1}\)即单步回报,等价于Sarsa算法。当\(\lambda=1\),\(G_t^\lambda=G_t\)即采样回报,等价于MC算法。
2.离线\(\lambda\)-回报算法
将\(\lambda\)-回报直接应用于强化学习,称为离线\(\lambda\)-回报算法(offline \(\lambda\)-returen algorithm)。之所以是离线,因为该算法采用的是蒙特卡洛方法,即必须完成一轮交互后才能计算更新。使用半梯度方式更新参数:
当\(0<\lambda<1\),离线\(\lambda\)-回报算法相当于介于Sarsa算法和MC算法之间,在实际应用中其效果与TD(n)算法效果相当。离线\(\lambda\)-回报算法也是前向算法的一种,即当达到一个状态后,就不再需要使用之前的状态了。更形象的表现如下图所示。
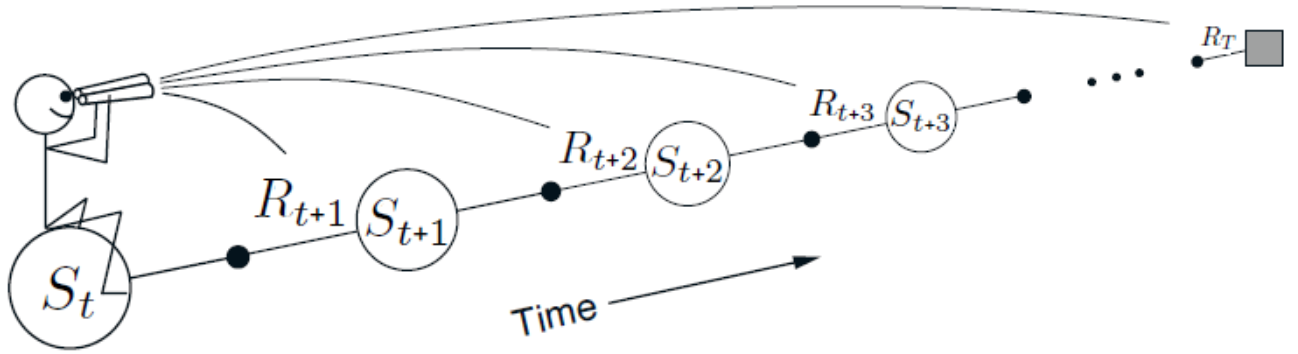
值得注意的是,离线回报算法并未引入有效循迹方法,同时它是一种前向算法。具体算法的实现和效果可以查看实验1。
3. TD(\(\lambda\))算法
TD(\(\lambda\))算法是第一个融入后向视角的强化学习算法。它在离线\(\lambda\)-回报算法的基础上做了三点改进。一是在每一步交互中都更新权重向量\(w\);二是它的计算量均匀分配在交互的过程中,而非集中在一轮交互结束后进行;三是它可以应用在连续问题上。
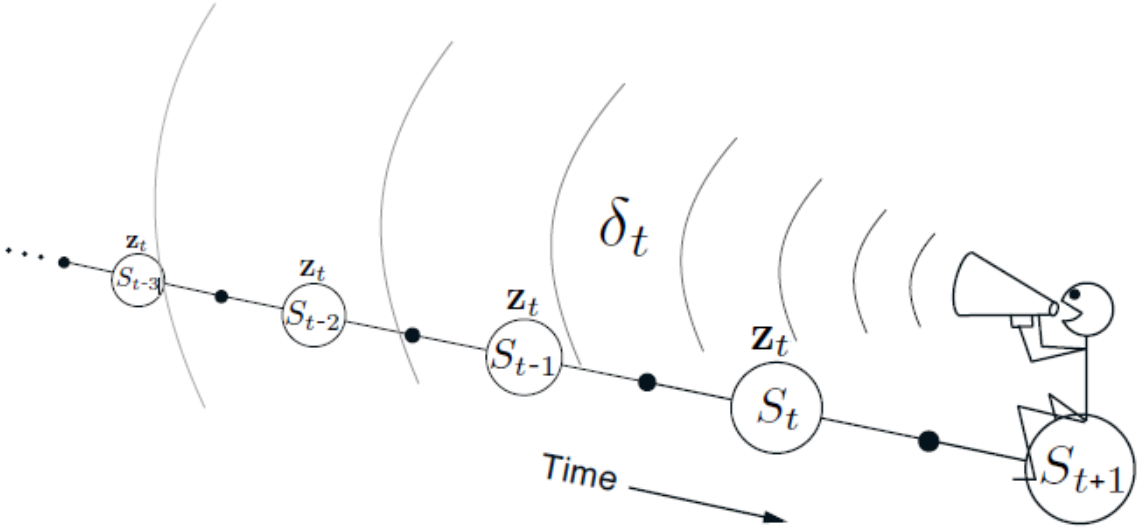
在TD(\(\lambda\))算法中,需要引入有效循迹\(z_t\),\(z_t\)初始为0,由累加项和衰减项所构成:
有效循迹\(z_t\)的更新与动量方式是有所区别的,更像是一种梯度方向的平滑处理。\(z_t\)是一种短期记忆,旧信息随着时间的增加而逐步衰减,同时它是一种后向视角,保存了之前遇到的状态信息,如下图所示。正如本章开头所述,在函数拟合的情况下,权重向量是一个长期记忆向量,而有效循迹向量是一个短期记忆向量。
对单步TD(\(\lambda\))算法来说,TD误差为
其参数更新公式为
综上可得总结得到TD(\(\lambda\))算法的伪代码如下图所示。具体实现和算法效果可以参照实验1。
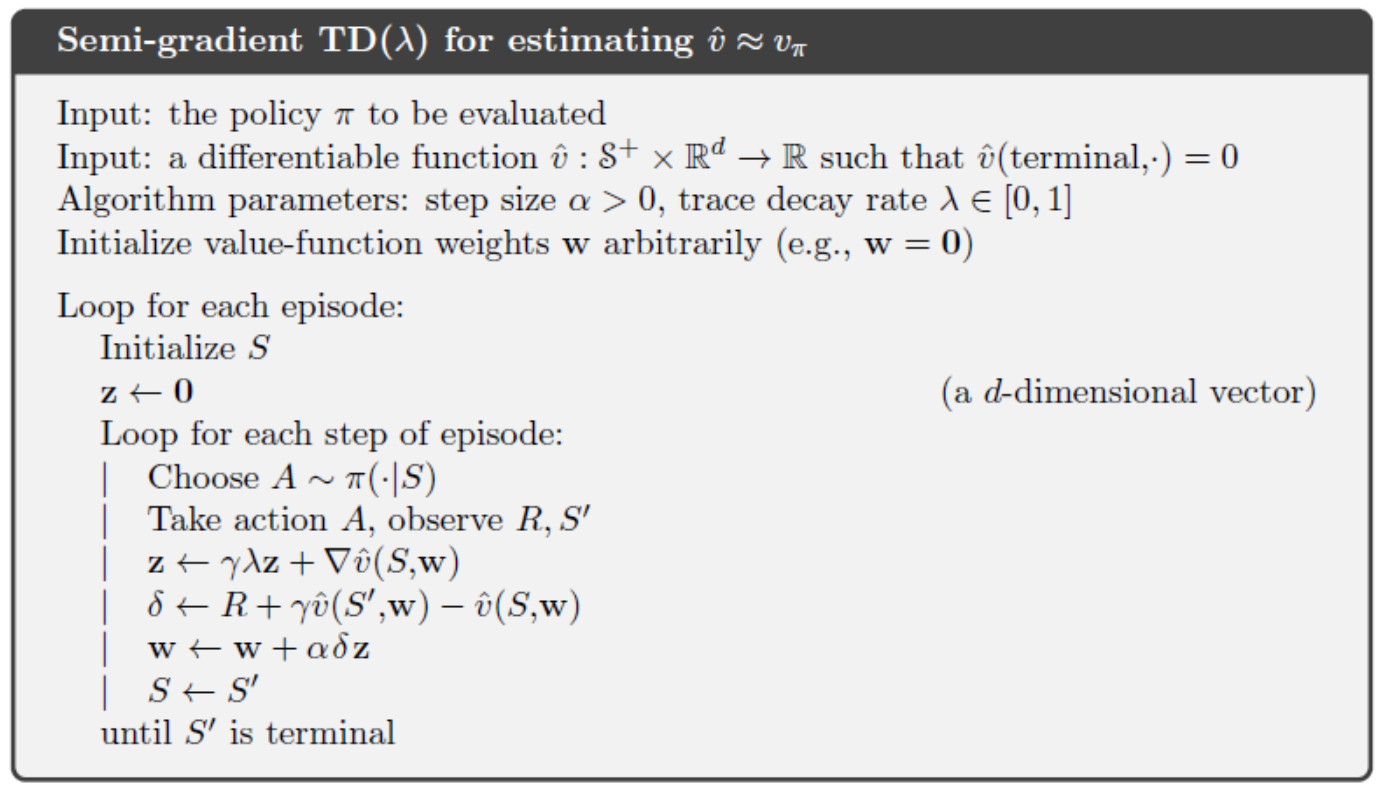
TD(\(\lambda\))是一种典型的后向算法。当\(\lambda=1\),循迹衰减系数只有\(\gamma\)。当\(\lambda=0\),TD(0)算法就是Sarsa算法。
线性TD(\(\lambda\))的收敛关系为
证明如下,
与第九章\(w_{TD}\)的稳定点一样,离线\(\lambda\)-回报算法的稳定点在于\(G_t^\lambda-\hat{v}(S_t,w_t)=0\)。根据算法渐进稳定性质,式(12.2)中\(\delta_{t+i}\approx\overline{VE}(w_\infin)\),可得
结合第九章的收敛性结果,
可得
证明完毕。
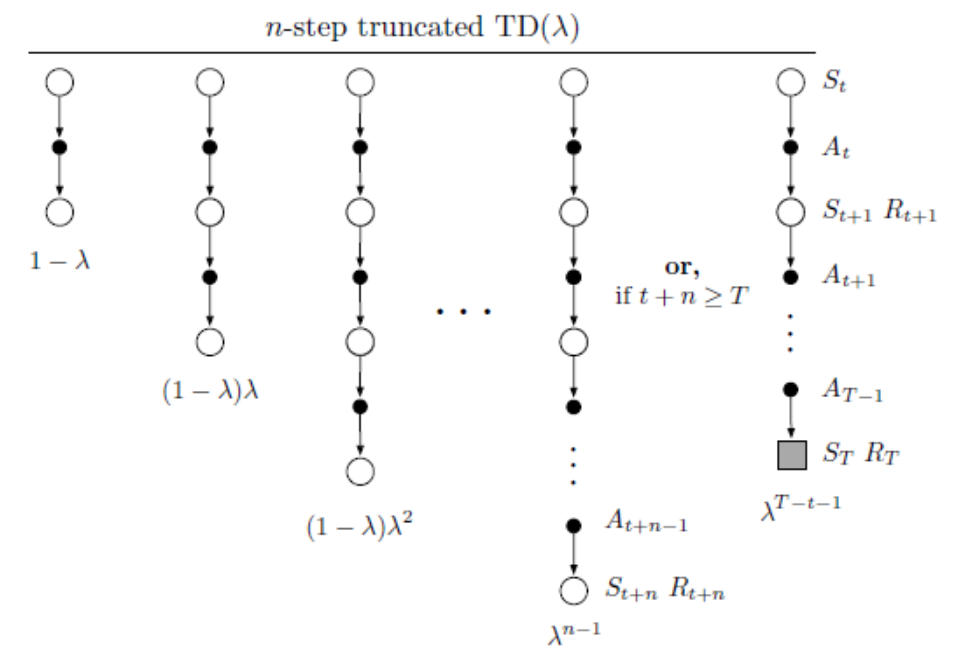
4. \(n\)步截断\(\lambda\)-回报算法
\(n\)步截断\(\lambda\)-回报算法,是对离线\(\lambda\)-回报算法的一种改进,融入了TD算法的思想,不必等到一轮交互完成后才进行更新,但不引入有效循迹方法,故而为区别TD(\(\lambda\))算法,称为TTD(\(\lambda\))算法(截断TD(\(\lambda\)))。定义截断\(\lambda\)-回报为
截断\(\lambda\)-回报的递推表达式推导起来比式(12.1)稍微复杂一些,下面给出大概的证明(会跳步):
证明完成。从最后的式子可以看出,下一时刻的状态价值估计本质上是\(\lambda\)-回报与价值估计的加权和。
根据截断\(\lambda\)-回报可得TTD(\(\lambda\))算法的更新式为
更新式的后备图如下图所示。
截断\(\lambda\)-回报\(G_{t:t+k}^\lambda\)也可以写成
其中,\(\delta_t'=R_{t+1}+\gamma\hat{v}(S_{t+1},w_t)-\hat{v}(S_t,w_t)\)。该式的证明比较简单,根据式(12.2)可得
证明完毕。
TTD(\(\lambda\))算法采用传统的TD更新式,只是将目标价值用截断\(\lambda\)-回报代替,未引入有效循迹。
5. 计划更新:在线\(\lambda\)-回报算法
截断\(\lambda\)-回报算法需要选择合适的\(n\)值,当\(n\)值较大时,类似于离线\(\lambda\)-回报算法,但是响应速度较慢。当\(n\)选择较小的时候,类似于TD算法,但每个数据只使用一次,数据的利用效率不高。为了综合两者的优势,采用改进方式为在每次交互后,根据交互轨迹从开始时刻重新计算目标价值进行更新。例如,首次交互时得到交互轨迹\(\{S_0,R_1,S_1\}\),计算截断\(\lambda\)-回报\(G_{0:1}^\lambda\)进行更新;2次交互时得到交互轨迹\(\{S_0,R_1,S_1,R_2,S_2\}\),分别计算截断\(\lambda\)-回报\(G_{0:2}^\lambda\)和\(G_{1:2}^\lambda\)进行更新;3次交互时得到交互轨迹\(\{S_0,R_1,S_1,R_2,S_2,R_3,S_3\}\),分别计算截断\(\lambda\)-回报\(G_{0:3}^\lambda\)、\(G_{1:3}^\lambda\)和\(G_{2:3}^\lambda\)进行更新。具体方法如下所示:
此处需要注意的是,在更新过程中,每次截断\(\lambda\)-回报的计算都是基于最新的参数估计\(w\)。总结可得其一般表达式为
该方法被称为在线\(\lambda\)-回报算法,相比于离线\(\lambda\)-回报算法,它在每一次交互后都会进行参数更新,具有实时响应的能力,其缺点在于计算复杂度更高,但效果也会更好。尤其是在数据不足的情况下,数据的利用效率较高。
在线\(\lambda\)-回报算法相比TTD(\(\lambda\))算法,区别在于能够重复利用已采集的数据,此处也并未显式的引入有效循迹。
6. 真在线TD(\(\lambda\))算法
上一节介绍的在线\(\lambda\)-回报算法随着交互次数的不断增加,每次参数更新的次数也会相应的呈线性增长趋势,如下图所示。
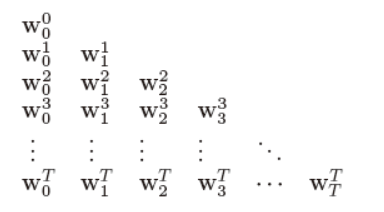
在某些特殊情况下,如线性函数拟合\(\hat{v}(s,w)=w^\Tau x(s)\),通过推导可以直接得到从\(w_0^h\)到\(w_h^h\)的更新公式,从而获得真正意义上的在线算法:
其中,\(\alpha, \gamma, \lambda\)分别为学习率、折扣系数和回报权重,\(\delta_t = R_{t+1}+\gamma\hat{v}(S_{t+1},w_t)-\hat{v}(S_t,w_t)\)为状态价值估计误差,\(x_t=x(S_t)\)为状态特征,\(z_t\)为有效循迹(也称为荷兰循迹,dutch trace),但区别于前面所提的有效循迹。下文会给出式(12.3)--(12.4)在蒙特卡洛学习下的推导方式,更具体的过程可以参考论文 “van Seijen, H. (2016). Effective multi-step temporal-difference learning for non-linear function approximation. ArXiv:1608.05151”。 值得注意的是,此处的荷兰循迹同样是后向视角的一种策略,但并非人为设置的,而是计划更新策略下所隐含的。上述的更新式的前置条件是采用线性函数拟合,若采用非线性函数拟合则只能回归到第5节所介绍的方法。后向视角的策略根植于参数\(w_t^h\)的横向更新过程中。
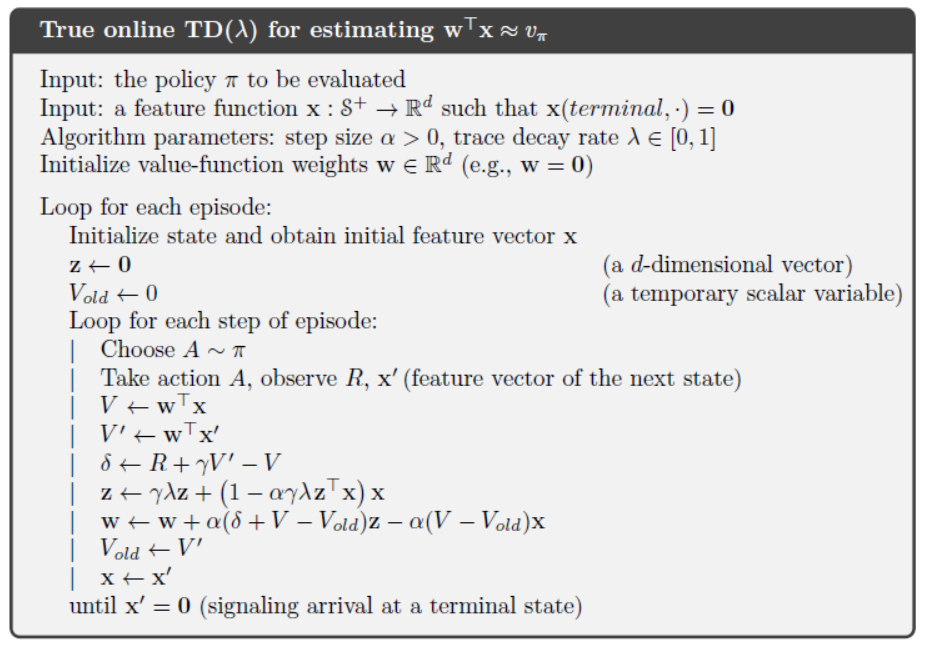
综上所述,可得真在线TD(\(\lambda\))算法具体实现的伪代码,如下图所示。具体代码实现和算法效果可以参考实验1。
为了与第3节TD(\(\lambda\))算法所采用的有效循迹做区分,本节的有效循迹称为荷兰循迹。TD(\(\lambda\))算法使用的有效循迹称为累积循迹(accumulating trace),原因在于\(z_t=\gamma\lambda z_{t-1}+\nabla\hat{v}(S_t,w_t)\)是将每次更新的梯度方向乘一个衰减系数累积起来。当线性函数拟合采用瓦片编码时,因为其状态特征为二值向量,每次更新只需要替换二值向量中为1的元素所对应的参数\(w_{i,t}\),因此该有效循迹也称为替换循迹(replacing trace),即
由此可以看出,替换循迹是荷兰循迹的一种特例。一般来说,累积循迹主要应用于非线性拟合的情况。
下面对荷兰循迹在蒙特卡洛(MC)算法中的应用进行理论分析,从中也能看出式(12.3)--(12.4)的部分推导过程。回顾一下MC算法的参数更新式为
之所以选择MC算法,是因为它更加简单。首先,MC算法的更新只发生在到达终止状态之后,因此,目标价值\(G\)为标量。其次,假设折扣系数\(\gamma=1\),交互过程中\(R=0\),仅在最后才获得奖励。我们将最后一次更新的计算量,分摊到每一次交互之后,即
定义\(F_t=(I-\alpha x_tx_t^\Tau)\),进一步可得
通过上式可得,只要在每次交互之后更新向量\(a_t\)和\(z_t\),最后得到回报\(G\)就可以完成参数向量\(w\)的更新。向量\(z_t\)就是荷兰循迹,可得其递推形式为
对比式(12.4),等价于\(\gamma=\lambda=1\),与第1节对\(\lambda\)的分析是一致的。向量\(a_t\)的递推形式较为简单,即
其中,\(a_0=w_0\)。
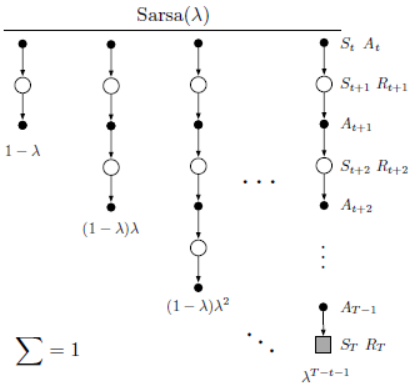
7.Sarsa(\(\lambda\))算法
可以将TD(\(\lambda\))算法扩展到Sarsa(\(\lambda\))算法,即将状态价值函数扩展为动作价值函数(状态-动作价值函数),可得其更新式为
其中,动作价值误差\(\delta_t = R_{t+1}+\gamma\hat{q}(S_{t+1},A_{t+1},w_t)-\hat{q}(S_t,A_t,w_t)\)。其备份图如下图所示。
下面给出基于瓦片编码的Sarsa(\(\lambda\))算法的伪代码实现过程,如下图所示。
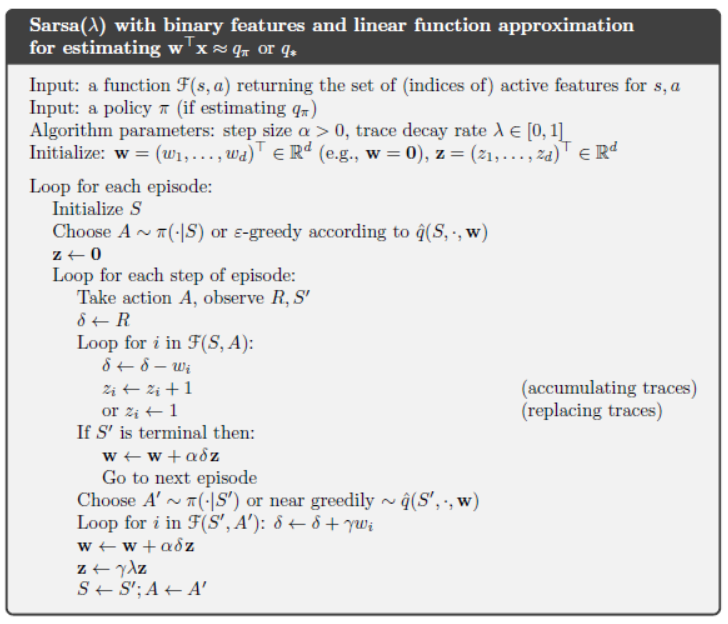
下面给出有效循迹之所以可以提高算法的学习效率的直观解释。假设在一个网格世界中生成了一段轨迹,初始动作价值估计为零,除到达标记的目标位置G获得正奖励外,其他交互的奖励为零。不同算法下的状态价值变化轨迹如下图所示。
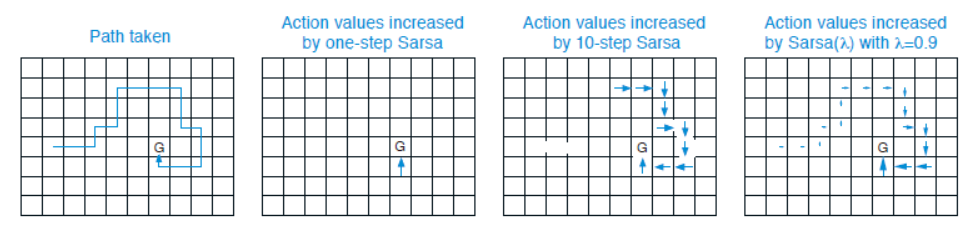
第一张图显示了智能体在一轮交互中的轨迹。其他图片的箭头显示了,当智能体达到目标时,哪些动作价值会增加,以及增加多少。Sarsa算法将只增加最后一个动作价值,而Sarsa(\(n\))算法会同等地增加最后\(n\)个动作的价值。Sarsa(\(\lambda\))算法将更新所有的动作价值,但是按照不同的权重,随着时间的延伸而逐渐衰减。通常衰落策略的效果是最好的。
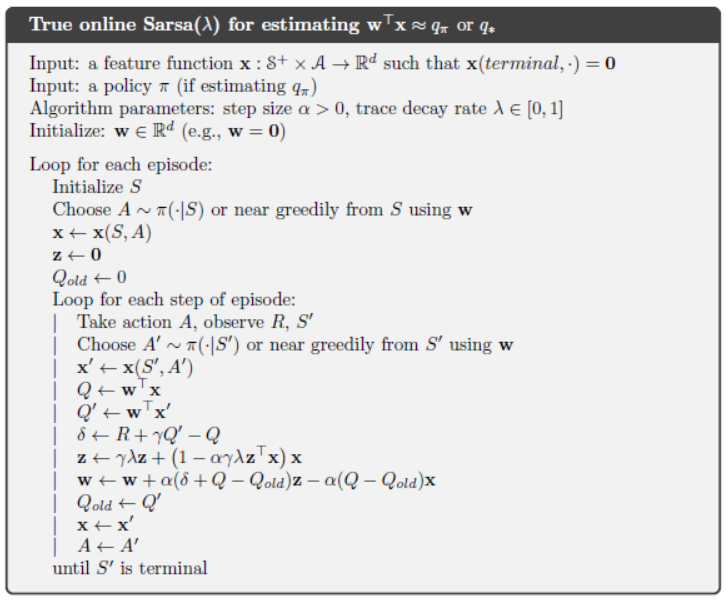
当然,真在线TD(\(\lambda\))算法也可以扩展为真Sarsa(\(\lambda\))算法,其伪代码如下图所示。
8. \(\lambda\)-回报的一般形式
前面将折扣系数\(\gamma\)和权重\(\lambda\)定义为常量,在本节考虑更为一般的形式,将\(\gamma\)和\(\lambda\)作为函数:
由此可以得到\(t\)时刻回报的一般表达为
根据第1节的\(\lambda\)-回报,可得广义\(\lambda\)-回报的递推表达式为
此处上标增加字符's'表示回报自举采用的是状态价值估计。若上标为'a'表示回报自举采用的是动作价值函数,即
当然,动作价值估计也可以采用期望的形式:
9.基于控制变量的离线策略有效循迹
根据第7章第4节,结合重要性采样和控制变量可得\(\lambda\)-回报的递推式为
其中,\(\rho_t=\frac{\pi(A_t|S_t)}{b(A_t|S_t)}\)。根据第4节截断\(\lambda\)-回报的完成式:
可得离线策略下的,\(G_t^{\lambda s}\)的完成式为
其中,TD误差\(\delta_t^s=R_{t+1}+\gamma_{t+1}\hat{v}(S_{t+1},w_t)-\hat{v}(S_t,w_t)\)。将\(G_t^{\lambda s}\)代入TD算法的更新式中可得
从上式可以看出这是一种前向更新方式,不断从各个时刻开始向前计算TD误差。但是乘积项\(\prod_{i=t+1}^k\gamma_i\lambda_i\rho_i\)像是一种有效循迹(对照\(\alpha\delta_tz_t\))。下面给出其隐含有效循迹的证明:
上式中第二项累加和就是一种后向视角,具体可得
总结可得,\(z_t=\rho_t(\gamma_t\lambda_tz_{t-1}+\nabla\hat{v}(S_t,w_t))\),这是累积循迹。同理可以将\(G_t^{\lambda s}\)扩展到\(G_t^{\lambda a}\),这里就不再赘述了。TD(\(\lambda\))算法是一种在线算法,相当于\(\rho_t=1\)(因为目标策略等同于交互策略),因此可以看作是离线策略的一种特例。值得注意的是,在上述证明中\(z_t\)的估计都是基于参数估计\(w_t\),相当于离线算法只在最后一次交互时才进行参数更新,但可以将计算量分摊至之前的每一次交互。当\(\lambda=1\),\(\lambda\)-回报离线算法等价于蒙特卡洛算法,上述讨论与之相同。当\(\lambda<1\),此时需要注意死亡三元素,\(\lambda\)-回报离线算法适用于列表法,但不适合于函数近似法。
10. Watkins's \(Q(\lambda)\)到树备份(TB(\(\lambda\)))算法
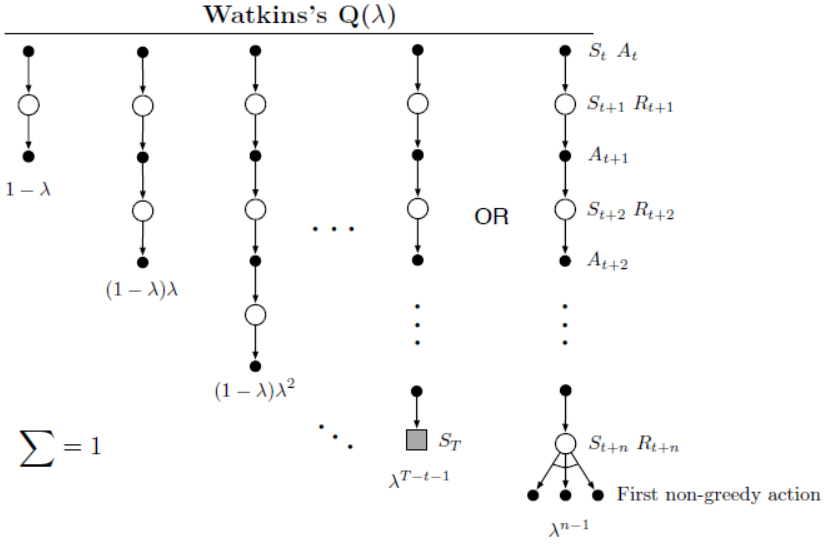
有一些方法可以将有效循迹应用到Q-learning方法中。最初的方法便是Watkins's Q(\(\lambda\))算法,当交互轨迹为一连串的贪婪动作时,有效循迹与TD(\(\lambda\))算法中的一样随着交互的增加而逐步衰减。但是当动作为非贪婪动作时,有效循迹则被设置为0,即累积循迹遇到非贪婪动作时则停止累积。Q(\(\lambda\))算法的备份图如下图所示。
Q-learing算法是一种较为特殊的离线策略算法。与之相比,树备份算法是一种离线策略算法且不需要引入重要性采样。将有效循迹应用到树备份算法,也称为TB(\(\lambda\))算法。其备份图如下图所示。
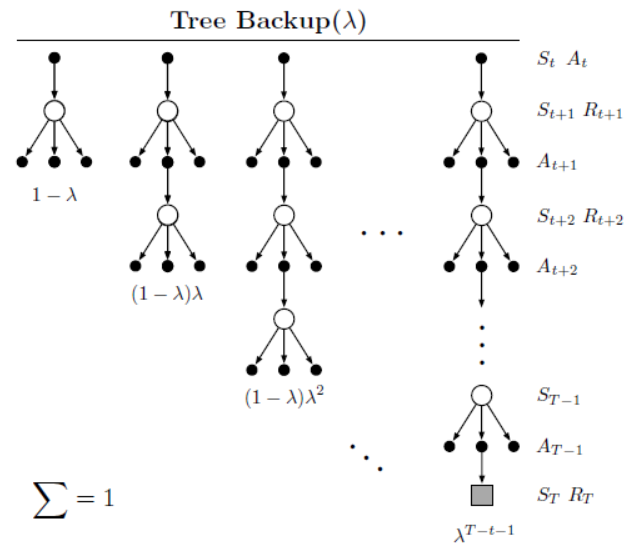
根据第8节中的广义\(\lambda\)-回报的递推表达式,可得树备份算法下的\(\lambda\)-回报的递推式为
根据第2节式(12.2)的推导,类比可得\(G_t^{\lambda a}\)的一次完成式,
其中,TD误差\(\delta_k^a=R_{t+1}+\gamma_{t+1}\bar{Q}(S_{t+1},w_t)-\hat{q}(S_t,A_t,w_t)\)。
参照第9节的推导,可得TB(\(\lambda\))算法中隐含的有效循迹:
跟其他的半梯度算法相同,TB(\(\lambda\))算法在死亡三要素的情况下也不能保证稳定与收敛。
11.基于有效循迹的稳定离线方法
在第11章中介绍了真正意义上的随机梯度算法GTD算法,在实际应用过程中会引入辅助向量\(v_t\),得到真正可以使用的TDC算法。将有效循迹应用于TDC算法,称为TDC(\(\lambda\))算法。需要注意的是,TDC算法的整个实现过程是基于线性函数拟合的,对于非线性函数则不适用。下面直接给出TDC(\(\lambda\))算法参数更新公式为
其中,TD误差\(\delta_t^s=R_{t+1}+\gamma_{t+1}\hat{v}(S_{t+1},w_t)-\hat{v}(S_t,w_t)\),有效循迹\(z_t=\rho_t(\gamma_t\lambda_tz_{t-1}+\nabla\hat{v}(S_t,w_t))\)。这里需要说明,该更新公式博主并未进行推理确认,比较好奇为何会出现\((1-\lambda_{t+1})\)这一项。后面有精力了会将证明补上。
TDC(\(\lambda\))算法考虑的是状态价值,将其思想扩展到动作价值可得GQ(\(\lambda\))算法。其目标在于学习动作价值函数\(\hat{q}(s,a,w_t)=w_t^\Tau x(s,a)\approx q_\pi(s,a)\)。当目标策略采用\(\epsilon\)-greedy策略或是贪婪策略时,GQ(\(\lambda\))算法可以作为控制算法。其参数更新公式为
其中,
下面将GTD(\(\lambda\))和TD(\(\lambda\))相结合,TD(\(\lambda\))更为简单快速,但GTD(\(\lambda\))是真正意义上的随机梯度算法,具有无偏稳定的特点,两者相结合称之为HTD(\(\lambda\))(hybrid TD)算法:
此处博主也有疑惑,首先\((1-\lambda_{t+1})\)这项为何不见了,其次两个算法是如何结合的,是基于GTD的原理,然后将TD(\(\lambda\))算法代入到其中的期望项中吗?当然,从算式本身来看,当目标策略与交互策略相同时,算法就退化称为TD(\(\lambda\))算法,这显然是正确的。
最后,将有效循迹扩展至重要性TD算法,得到E-TD(\(\lambda\))算法:
这里需要提及的是,有研究论文表明TD(\(\lambda\))算法的收敛性仅在\(\lambda\)为常数的时候才能得到保证。而第11节提到的算法没有这个限制。
12. 小结
本章主要介绍了有效循迹的思想和方法,引入有效循迹的方式有两种,一种是人为设定,例如TD(\(\lambda\))算法;另一种是引入\(\lambda\)-回报或者截断\(\lambda\)-回报,结合计划更新方式或者是其他离线策略算法,使得扩展后的算法中隐含了有效循迹的方式。有效循迹是一种后向视角的策略,它保存了之前交互得到的轨迹信息。这与以往的学习策略有本质区别,以往的学习策略是通过向前预测其状态价值或者动作价值,从而更新参数或是策略。本章后面几小节涉及的算法没有给出相应的推导细节。
12 .实验
实验1:Random Walk问题
考虑一个马尔可夫奖励过程(Markov reward process, MRP),每轮交互都从中心状态开始,每个状态可以随机选择向左或者向右两种动作,两个动作的选择概率为50%。每轮交互的结束状态位于最左端和最右端,当智能体到达最右端获得奖励\(R=+1\),到达最左端获得奖励\(R=-1\),其他状态转移的奖励均为\(R=0\)。本次MRP过程共有19个状态,分别利用离线\(\lambda\)-回报算法、TD(\(\lambda\))算法和真在线TD(\(\lambda\))算法估计状态价值,并对比这三个算法性能。
因为实验的MRP过程的状态较少,因此采用状态聚集的线性近似方法,将每个状态作为一类,即状态特征是一个二值向量,每个时刻向量中有且只有一个元素为1,其余元素为0。可得状态价值估计\(v(S_i)=w^\Tau x(S_i)=w_i\)。
对于离线\(\lambda\)-回报算法,其核心公式为
代码实现过程中,需要先计算\(G_{t:t+n}\),核心代码如下。
def n_step_return_from_time(self, n, time):
# gamma=1 仅当到达终止状态奖励才不为0
end_time = min(time + n, self.T)
returns = self.value(self.trajectory[end_time])
if end_time == self.T:
returns += self.reward
return returns
然后计算\(G_t^\lambda\),当交互轨迹较长时,\(\lambda^n\)会特别小对\(\lambda\)-回报的贡献度贡献度可以忽略,因此会添加一个截断阈值来加快计算,核心代码如下。
def lambda_return_from_time(self, time):
returns = 0.0
lambda_power = 1
for n in range(1, self.T - time):
returns += lambda_power * self.n_step_return_from_time(n, time)
lambda_power *= self.rate
if lambda_power < self.rate_truncate:
# 当系数过小时,则截断
break
returns *= 1 - self.rate
if lambda_power >= self.rate_truncate:
returns += lambda_power * self.reward
return returns
参数更新就比较简单了,因为采用的是二值特征,因此每次迭代只需要更新对应状态的权重,核心代码如下。
def off_line_learn(self):
for time in range(self.T):
# update for each state in the trajectory
state = self.trajectory[time]
delta = self.lambda_return_from_time(time) - self.value(state)
delta *= self.step_size
self.weights[state] += delta
在实验过程中,初始参数为\(w=0_{19}\),\(\alpha\in(0,1]\),\(\gamma=1\)。\(\lambda\in[0.0, 0.4, 0.8, 0.9, 0.95, 0.975, 0.99, 1]\)。当\(\lambda\)较大时,学习率较大会导致算法发散。考察离线\(\lambda\)-回报算法的瞬时性能,计算状态价值估计与真实状态价值的均方误差,共进行10轮交互。为了保证实验结果的一致性,共进行50轮重复实验。具体代码参照随书代码第12章random_walk.py,实验结果如下图所示。
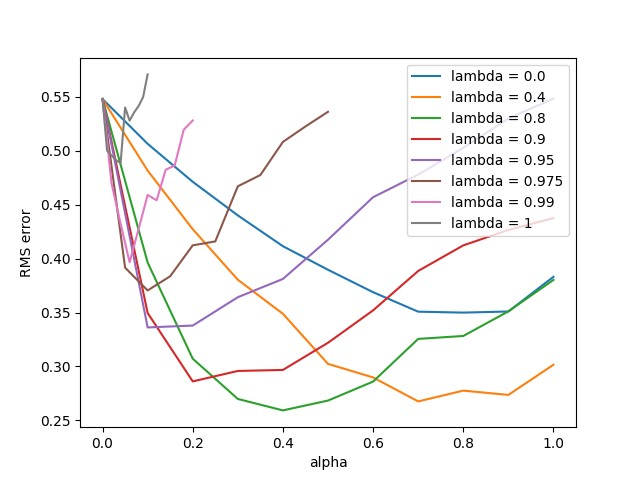
对于TD(\(\lambda\))算法而言,其核心公式为
与TD(0)算法相比,由于有效循迹的存在,使得每次交互所有状态的权重都会得到更新。实验过程和上述过程保持一致。实验结果如下图所示。
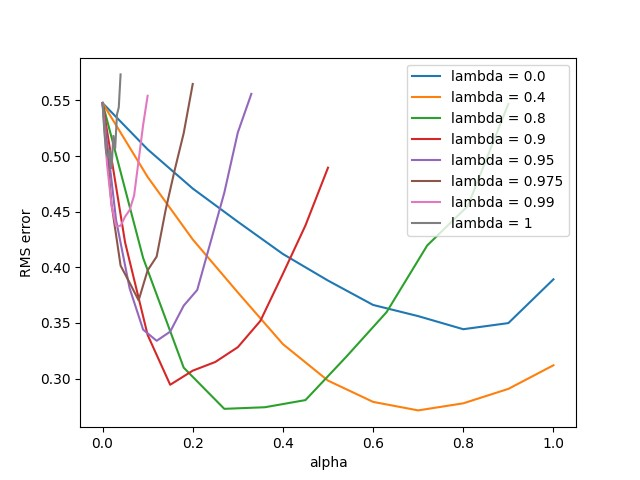
对于真在线TD(\(\lambda\))算法而言,其核心公式为
这里需要注意的是,核心公式中涉及三个状态价值估计,尤其是基于上一时刻的权值估计计算得到的状态价值\(V_{old}(S_t)\),在代码实现过程中容易搞错。实验过程和上述过程保持一致。实验结果如下图所示。
.assets/image-20240327111153655.png)
对比上面三张图,真在线TD(\(\lambda\))算法的算法性能略低于离线\(\lambda\)-回报算法,但是比TD(\(\lambda\))算法要好。原因在于,真在线TD(\(\lambda\))算法是采用自举的方式进行更新,存在有偏估计,但是它能重复利用数据,因此效果的得到了提升。从运算速度方面而言,TD(\(\lambda\))算法是最快的,因为它的计算量小,其次是真在线TD(\(\lambda\))算法。从响应速度方面而言,离线\(\lambda\)-回报算法无法做到实时响应,它需要完成一轮交互之后才能进行更新,因此在实际应用当中有很大限制。真在线TD(\(\lambda\))算法的整体性能更加均衡,在保证响应速度情况下,重复利用数据,提升了性能。最后,附上第七章TD(n)算法的瞬时性能效果图。
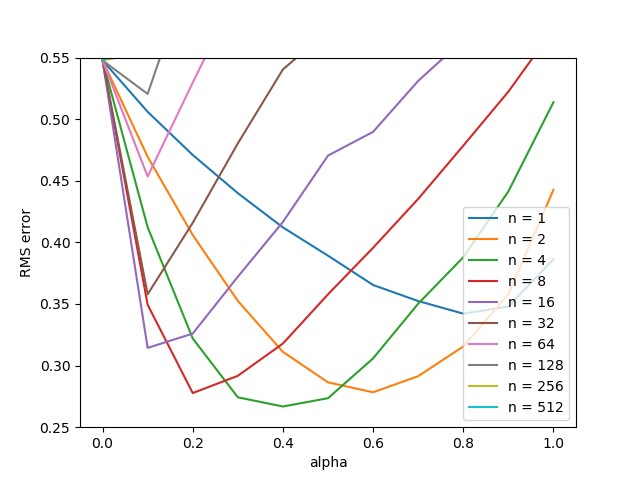
对比可以看出,引入有效循迹之后,算法对学习率的变化不再那么敏感。从算法性能上而言,也是引入有效循迹的算法能好一些。
实验2:汽车爬坡任务
实验2 采用与第十章实验1相同的实验环境。这里做简要的描述,考虑驾驶一辆动力不足的汽车沿着陡峭的山路行驶的任务,如下图所示。小车的动作有三种行为\(A_t\),分别是向前(\(+1\)),向后(\(-1\))和不踩油门(0)。汽车在达到目标位置之前的每一步的奖励都是\(R=-1\)。
爬坡任务的状态包含汽车的位置\(x_t\)和车速\(\dot{x}_t\),其更新方式为
其中,位置范围限制在\([-1.2,0.5]\)和速度范围限制在\([-0.07,0.07]\)。加速系数\(force=0.001\),重力系数\(gravity=0.0025\)。每一轮游戏开始,小车的速度为0,随机位置\(x_0\in[-0.6,-0.4]\)。采用瓦片编码方式近似动作价值函数,利用Sarsa(\(\lambda\))算法估计最优策略。超参数选择\(\gamma=1\),瓦片数量\(=8\),哈希表大小=\(2048\),学习率\(\alpha=0.3\)。动作选择采用过估计的方式,因此\(\epsilon=0\)。
利用Sarsa(\(\lambda\))算法的核心公式为
需要注意的是,核心公式中的有效循迹采用的是累积循迹的效果并不理想。其原因可能在于轨迹采样的有偏性,使得状态空间中的感兴趣区域被不断访问,累积循迹\(z_t\)的某些元素会被不断增强,当更好策略出现时难以进行纠正。后面会针对不同的循迹方式进行比较实验,引入替换循迹、带修正的替换循迹和荷兰循迹。
考察Sarsa(\(\lambda\))算法的瞬时性能,记录每轮游戏的交互次数,共进行50轮交互,最后计算得到每轮游戏平均交互次数。实验采用替换循迹,为了保证实验结果的一致性,共进行100轮重复实验。具体代码参照随书代码第12章mountain_car.py,实验结果如下图所示。
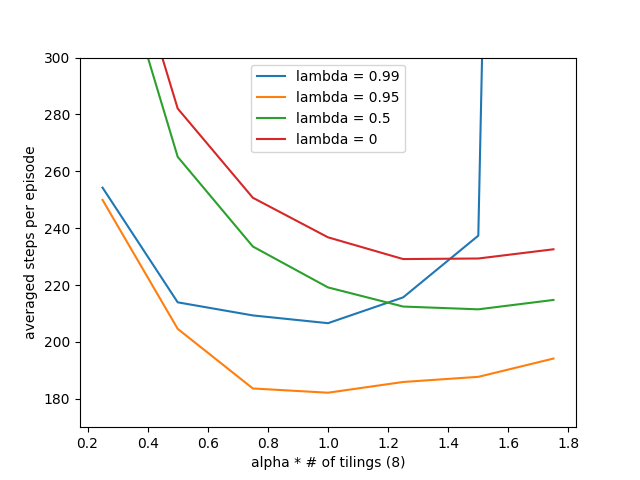
从实验结果可以看出,\(\lambda\)越小Sarsa(\(\lambda\))算法对学习率的敏感度越低,这与第一节的理论分析是一致的。当\(\lambda\)越小,\(\lambda\)-回报就越接近于单步Sarsa回报,而Sarsa(0)算法对学习率的敏感度就比较低,可以参考与第10章的实验1的结果。当\(\lambda\)越大,那么更长轨迹会被纳入考量,这时学习率过大会导致算法不稳定。
下面比较累积循迹、替换循迹、带修正的替换循迹和荷兰循迹的瞬时性能。
-
累积循迹
核心公式为\(z_t = \gamma\lambda z_{t-1}+\nabla\hat{q}(S_t,A_t,w_t)\),正如前面所说,轨迹采样存在有偏会导致算法不稳定。当\(\lambda\)取值较小时,纳入考量的轨迹长度也会变小,此时算法就可以稳定了。
-
替换循迹
核心公式为
\[z_{i,t}=\left\{ \begin{array}{l} 1, && \text{if}\ x_{i,t}=1\\ \gamma\lambda z_{i,t-1}, && \text{otherwise} \end{array} \right. \]替换循迹的好处在于限制了循迹的最大值,从而增强了智能体的探索能力。在本实验中表现也是比较好的。类似的可以扩展到Cart-Pole模型。
-
带修正的替换循迹
核心公式为
\[z_{i,t}=\left\{ \begin{array}{l} 1, && \text{if}\ x_{i,t}=1\\ 0, && \text{if}\ x_{i,t}=x_i(S_t,a_t),\ a_t为未被选中的动作\\ \gamma\lambda z_{i,t-1}, && \text{otherwise} \end{array} \right. \]将未被选中的动作的循迹进行清空,即将未选中的状态-动作所对应的瓦片编码的循迹设置为0。这里相当于做了一个假设,若动作未被选中则表示该动作不值得加强。当然,这样也有一个缺点,当采用\(\epsilon\)-greedy策略时,贪婪动作可能得不到加强,智能体的探索能力加强了,但是挖掘能力减弱了。在本实验中,带修正的替换循迹的瞬时表现不如替换循迹,这也可以理解,因为前者的挖掘能力相对弱一些,但是更有可能找到最优策略。
-
荷兰循迹
核心公式为
\(z_t = \gamma\lambda z_{t-1}+(1-\alpha\gamma\lambda z_{t-1}^\Tau x_t)x_t\)
荷兰循迹的表现是最好的,在探索和挖掘之间找到了更好平衡。计算量虽然会大一些,但是效果会好很多。不得不说这是一个非常强大的算法,唯一不足在于荷兰循迹是针对线性函数拟合的,不适用于非线性函数拟合。
为了保证实验结果的一致性,共进行50轮重复实验。参数选择\(\lambda=0.95\),共交互30轮。具体代码参照随书代码第12章mountain_car.py,实验结果如下图所示。
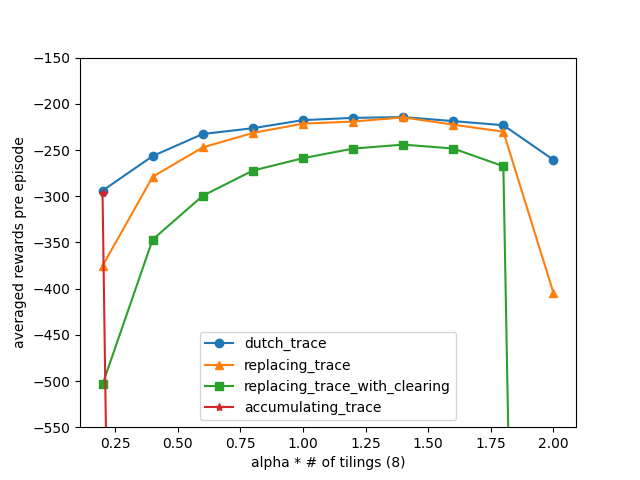
实验结果于上面的分析是一致的。
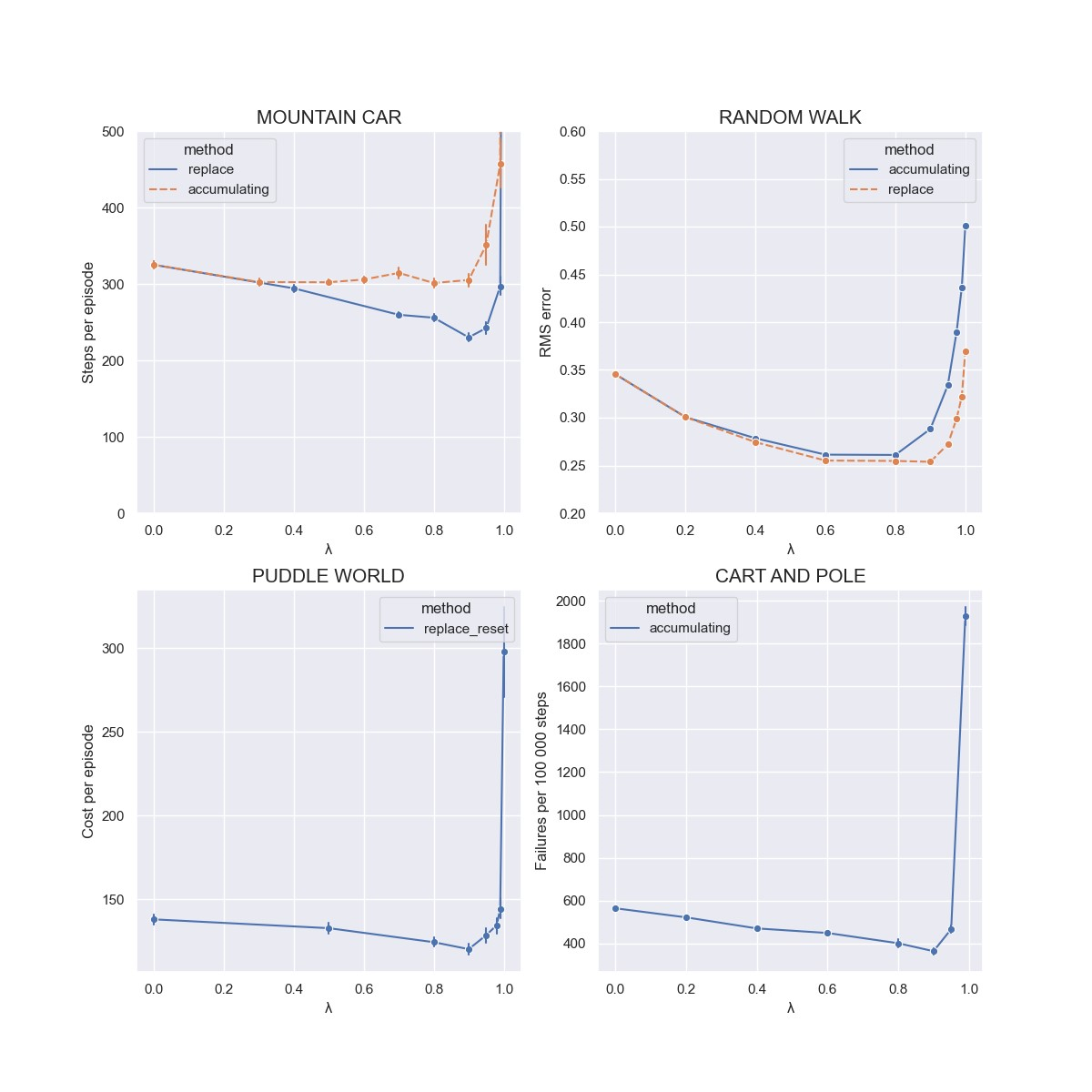
实验3:有效循迹的优势
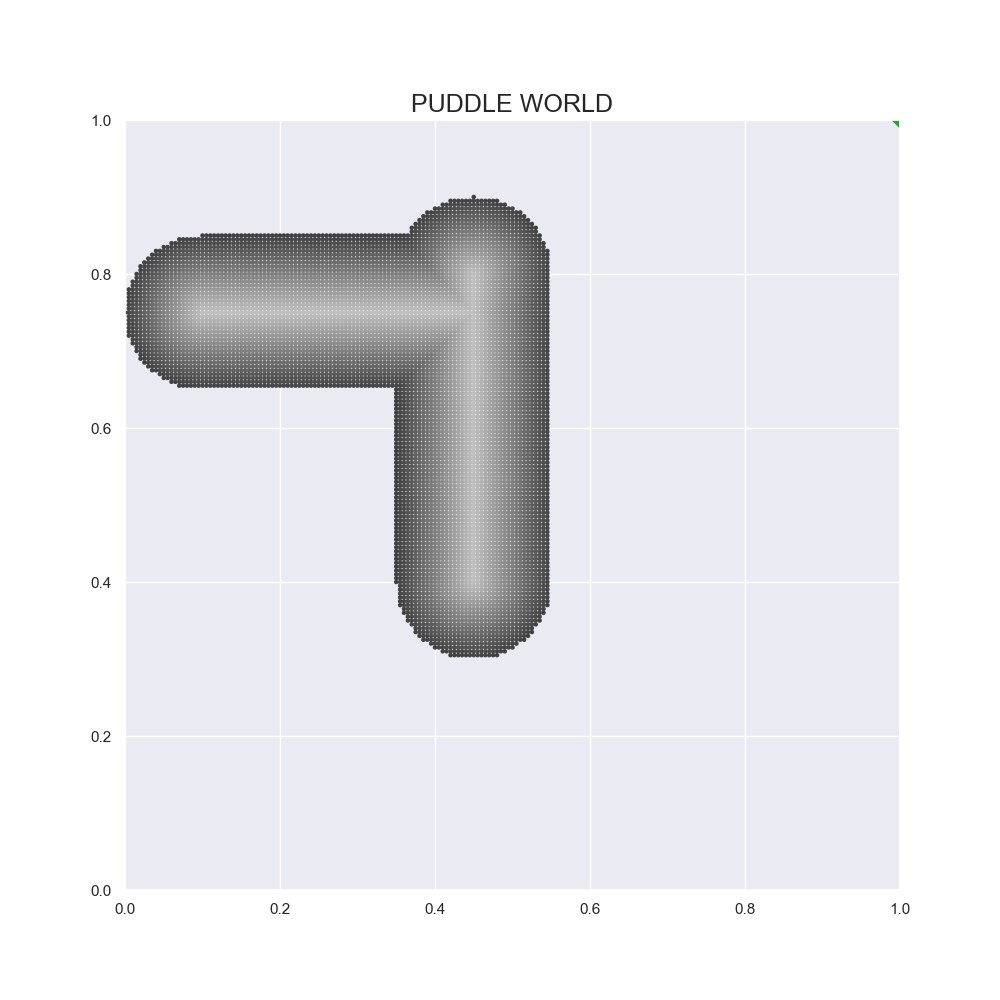
本实验针对四种环境进行有效循迹算法的测试,分别为随机游走任务(参考第九章实验2)、汽车爬坡任务(参考第十章实验1)、Cart-Pole任务和水坑世界任务。其中,水坑世界任务如下图所示,智能体总是从左上角出发寻找一条路径前往右上角。灰色部分为水坑,当智能体踩到水坑时会受到惩罚得到较大的负奖励,负奖励的程度与智能体踩入水坑的程度有关。只要没达到终点,每一次交互的奖励都是\(R=-1\)。
考察有效循迹对TD(\(\lambda\))或Sarsa(\(\lambda\))算法的瞬时性能的影响,不同环境记录的评价指标是不同的,随机游走任务记录的是状态价值估计与真实状态价值的均方误差;汽车爬坡任务记录的是每局的平均交互次数;Cart-Pole任务记录的是在给定最大交互次数内,智能体平均失败次数;水坑世界任务记录的是每局的平均累积奖励。
具体代码参照随书代码第12章lambda_effect.py,代码非常的长,主要将有效循迹的计算部分单独定义出来从而增加代码灵活性,详见函数update_trace_vector。每个环境设置了三个类分别是环境类、智能体类和任务类,例如随机游走任务中RandomWalkEnvironment类用于定义随机游走任务环境;RandomWalkAgent类用于定义智能体及其学习方式run_td_lambda();RandomWalk类用于定义任务,包括记录数据和训练。
值得一提的是,在记录大量实验数据的过程中,灵活应用pandas库记录不同\(\lambda\)不同有效循迹策略下的评价指标,利用dataframe.groupby()函数实现对不同条件下的评价指标的均值的计算。这个技巧非常有用。
最后,实验结果如下图所示。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号