
#include <stdio.h> #include <semaphore.h> #include <pthread.h> #include <stdlib.h> #include <unistd.h> #include <sys/syscall.h> // 系统分配线程 和代码顺序无关 sem_t can_add; sem_t can_mul; sem_t can_scanf; int x,y; /* void Print() { printf("************************\n"); printf("can add is %ld\n",can_add.__align); printf("can mul is %ld\n",can_mul.__align); printf("can scanf is %ld\n",can_scanf.__align); printf("************************\n"); } */ void *thread_add(void *arg) { while (1) { // Print(); printf("add enter\n"); sem_wait(&can_add); // 第一次到这边 因为初始signal 是 0 所以就阻塞在这句了 // 第二次由while那边add 加了1个 signal , 此时add signal = 1,就可以执行这一句,执行后add signal= 0 后面代码继续执行 printf("add\n"); printf("%d+%d=%d\n",x,y,x+y); sem_post(&can_mul); printf("add end\n"); // Print(); } } void *thread_mul(void *arg) { while (1) { // Print(); printf("mul enter\n"); sem_wait(&can_mul);// 第一次到这边 因为初始signal 是 0 所以就阻塞在这句了 printf("mul\n"); printf("%d*%d=%d\n",x,y,x*y); sem_post(&can_scanf); printf("mul end\n"); // Print(); } } // 这个程序总共1个进程 有三个线程 1个是主函数中 一个是add 一个是mul 总共这三个线程 int main() { pthread_t tid; // int arg[2]; // 设置信号量 信号量 为 1 遇到 sem_wait 会变为 0 继续执行后面代码 而信号量 为 0 时 遇到 sem_wait 会阻塞 sem_init(&can_scanf,0,1); sem_init(&can_add,0,0); sem_init(&can_mul,0,0); // Print(); printf("thread begin create\n"); // 创造线程 此后三个线程是并发运行的 if(pthread_create(&tid,NULL,thread_add,NULL) < 0) { perror("Create thread_add failed!\n"); } if(pthread_create(&tid,NULL,thread_mul,NULL)) { perror("Create thread_mul failed!\n"); } printf("thread end create\n"); while (1) { // Print(); printf("while enter\n"); // 第一次 can_scanf signal = 1 wait后值为0 代码可以继续向后执行 第二次循环 scanf signal = 0 发生阻塞 这时 add singal = 1 执行 add 线程 sem_wait(&can_scanf); // wait 第一次如果信号量是1的话 会往下执行一次 但是如果此时信号量是0的话 就开始阻塞 所以 就会执行 信号量为1的线程 printf("Please input two integers:"); scanf("%d%d",&x,&y); sem_post(&can_add); // 给add 增加信号量为 1 printf("the thread is %ld\n",syscall(SYS_gettid)); printf("while end\n"); // Print(); } }
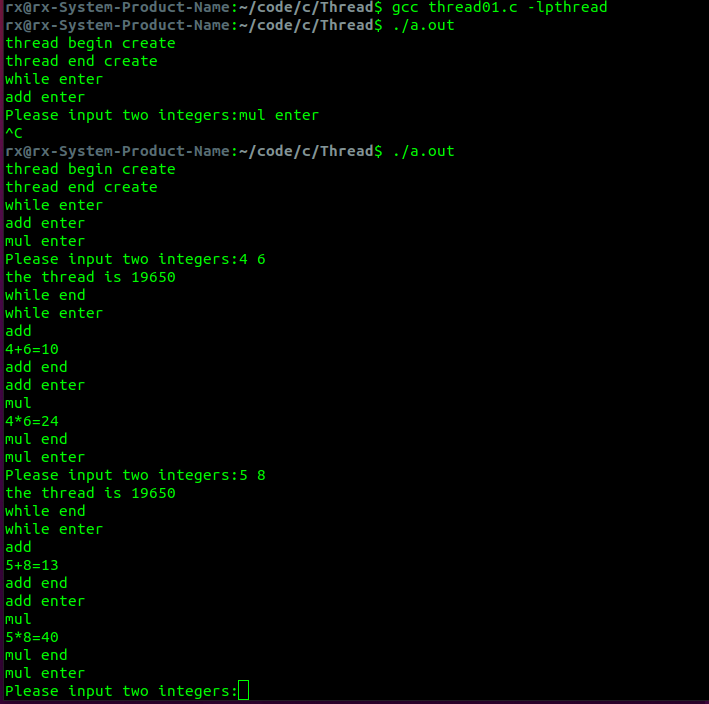
可以发现两次运行 while enter add enter mul enter 每次运行顺序是不一样的 这是因为一开始三个线程都是在运行状态 它们的运行顺序是由系统分配的 这就是为什么 需要用 wait 降低信号量来阻塞 这样就可以控制线程运行顺序

 浙公网安备 33010602011771号
浙公网安备 33010602011771号