南大2021高级机器学习期末复习
十、降维和度量学习
10.1、k-近邻学习
10.1.1、懒惰学习
不关心学到什么,只一字不差的存储内容
10.1.2、KNN错误率
最近邻分离器的错误率:设样本x,最近邻z,错误率为1-(x和z同类)
X=z时,求得最近邻分离器的泛化错误率<=2*最优贝叶斯分类器的泛化错误率。
最近邻分类器虽简单,但它的泛化错误率不超过贝叶斯最优分类器的错误率的两倍!
10.2、低维嵌入
10.2.1、维数灾难
在高维情形下出现的数据样本稀疏、 距离计算困难等问题, 是所有机器学习方法共同面临的严重障碍, 被称为维数灾难。
10.2.2、多维数缩放方法MDS
MDS (Multiple Dimensional Scaling) 旨在寻找一个低维子空间,
样本在此子空间内的距离和样本原有距离尽量保持不变
输入:距离矩阵 \(\mathbf{D} \in \mathbb{R}^{m \times m}\), 其元素 \(d i s t_{i j}\) 为样本 \(x_{i}\) 到 \(x_{j}\) 的距离; 低维空间维数d' :
过程:
1: 计算\({dist}_{i .}^{2}\),\({dist}_{. j}^{2}\),\({dist}_{. .}^{2}\)
2: 由此即可通过降维前后保持不变的距离矩阵 D 求取内积矩阵 B.
3: 对矩阵 B 做特征值分解;
\(B = V{\Lambda}V^T\)
其中 \({\Lambda} = diag(λ_1,λ_2, ...,{\lambda}_d)\)为特征值构成的对角矩阵,
4: 取 \(\tilde{\Lambda}\) 为 d' 个最大特征值所构成的对角矩阵,\(\tilde{V}\)为相应的特征向量矩阵.
输出:矩阵\(\tilde{\mathbf{V}} \tilde{\mathbf{\Lambda}}^{1 / 2} \in \mathbb{R}^{m \times d^{\prime}}\),每行是一个样本的低维坐标
10.3、PCA
https://blog.csdn.net/u010910642/article/details/51442939
10.3.1、最近重构性:样本点到这个超平面的距离都足够近
考虑整个训练集,原样本点\(x_i\)与基于投影重构的样本点\(\hat{x_i}\)之间的距离为
\(\propto\)代表是正比
\(\boldsymbol{w}_{j}\) 是正交基 \(\sum_{i} \boldsymbol{x}_{i} \boldsymbol{x}_{i}^{\mathrm{T}}\) 是协方差矩阵,于是由最近重构性,有:
10.3.2、最大可分性:样本点在这个超平面上的投影能尽可能分开
样本点\(x_i\)在新空间上的投影为\(W^Tx_i\)
若所有样本点能近可能分开,则应该使投影后样本的方差最大,即\(\sum_ix_i^TWW^Tx_i\)
由\(x_i^TWW^Tx_i\)=\(tr(W^Tx_ix^T_iW)\)
可知优化目标函数为
10.3.3、求解
使用拉格朗日乘子法可得
\(XX^TW = {\lambda}W\)
只需对协方差矩阵 \(XX^T\) 进行特征值分解,并将求得的特征值排序\(:{\lambda}_1,{\lambda}_ 2 ··· {\lambda}_d\) ,再取前 d’ 个特征值对应的特征向量构成 \(W = (w_1, w_2, . . . , w_{d'} )\),这就是主成分分析的解。
10.4、流形学习
线性降维方法假设从高维空间到低维空间的函数映射是线性的,然而在许多现实任务中,可能需要非线性映射才能找到恰当的低维嵌入
10.4.1、核化PAC
核化PCA:加了一个核函数
假定 \(z_{i}\) 是由原始属性空间中样本点通过映射 \(\phi\) 产生, 即 \(_{\mathbf{z}_{i}}=\phi\left(\boldsymbol{x}_{i}\right), i=1,2, \ldots, m\)
于是有
令 \(\kappa\left(\boldsymbol{x}_{i}, \boldsymbol{x}_{j}\right)=\phi\left(\boldsymbol{x}_{i}\right)^{\mathrm{T}} \phi\left(\boldsymbol{x}_{j}\right)\) 可得 \(\mathbf{K A}=\lambda \mathbf{A}, \mathbf{A}=\left(\boldsymbol{\alpha}_{1} ; \boldsymbol{\alpha}_{\mathbf{2}} ; \ldots ; \boldsymbol{\alpha}_{\mathbf{m}}\right)\)
于是
10.4.2、ISOMAP
- 构造近邻图
- 基于最短路径算法近似任意两点之间的测地线(geodesic)距离
- 基于距离矩阵通过MDS获得低维嵌入
10.4.3、LLE
-
为每个样本构造近邻集合\(Q_i\)
-
为每个样本计算基于Qi的线性重构系数
\[\begin{aligned} \min _{\mathbf{w}_{1}, \mathbf{w}_{2}, \ldots, \mathbf{w}_{m}} & \sum_{i=1}^{m}\left\|\boldsymbol{x}_{i}-\sum_{j \in Q_{i}} w_{i j} \boldsymbol{x}_{j}\right\|_{2}^{2} \\ \text { s.t. } & \sum_{j \in Q_{i}} w_{i j}=1, \\ \end{aligned} \] -
在低维空间中保持\(w_{ij}\) 不变,求解下式
\[\\ \min _{\mathbf{z}_{1}, \mathbf{z}_{2}, \ldots, \mathbf{z}_{m}} \sum_{i=1}^{m}\left\|\boldsymbol{z}_{i}-\sum_{j \in Q_{i}} w_{i j} \boldsymbol{z}_{j}\right\|_{2}^{2} \]
10.5、度量学习
10.5.1、马氏距离
马氏距离就是特征空间通过矩阵L做完线性变换后的欧式距离。当L为单位阵时,马氏距离就等于欧式距离。
其中 M 是一个半正定对称矩阵,亦称“度量矩阵”,距离度量学习就是要对 M 进行学习
十一、特征选择和稀疏学习
11.1、子集搜索
用贪心策略选择包含重要信息的特征子集
前向搜索:逐渐增加相关特征
后向搜索:从完整的特征集合开始,逐渐减少特征
双向搜索:每一轮逐渐增加相关特征,同时减少无关特征
11.2、子集评价
其中信息熵定义为:
信息增益 Gain(A) 越大,意味着特征子集 A 包含的有助于分类的信息越多.于 是,对每个候选特征子集,我们可基于训练数据集 D 来计算其信息增益,以此作为评价准则.
11.3、常见的特征选择方法
11.3.1、Filter:过滤法
先对特征集进行特征选择,然后再训练学习器
特点:特征选择过程与后续学习器无关,直接“过滤”特征
方法:对各个特征进行评分,设定阈值或者待选择阈值的个数,来选择特征。
11.3.1.1、Relief方法
针对二分类问题。
1、给定训练集\({(x_1,y_1),(x_2,y_2)...(x_m,y_m,)}\)。
2、对每个示例,先在\(x_{i}\),的同类样本中寻找其最近邻\(x_{i,nh}\),称为“猜中近邻”(near-hit) 。
3、再从\(x_i\);的异类样本中寻找最近邻\(x_{i,nm}\),称为“猜错近邻”(near-miss), 然后相关统计量。
4、在对应属性j的分量为
\(\delta_{j}=\sum_{i}-\operatorname{diff}\left(x_{i}^{j}-x_{i, n h}^{j}\right)^{2}+\operatorname{diff}\left(x_{i}^{j}-x_{i, n m}^{j}\right)^{2}\)
5、其中\(x_{a}^j\),表示样本\(x_{a}\)在属性j上的取值。注意x。已经归一化到[0,1]区间。
6、从上面的式子可以看出,若\(x_i\)与其猜中近邻\(x_{i,nh}\)在属性j上的距离小于与其猜错近邻\(x_{i,nm}\)的距离,则说明属性j对区分同类与异类样本是有益的,反之,则说明是无意义的。
11.3.1.2、其扩展变体Relief-F能处理多分类问题
\(\delta^{j}=\sum_{i}-\operatorname{diff}\left(x_{i}^{j}, x_{i, n h}^{j}\right)^{2}+\sum_{l \neq k}\left(p_{l} \times \operatorname{diff}\left(x_{i}^{j}, x_{i, l, n m}^{j}\right)^{2}\right)\)
\(p_l\)为第l类样本在数据集D中所占的比例
11.3.2、包裹式
直接把最终将要使用的学习器的性能作为特征子集的评价准则,选择的是“量身定做”的特征子集。
特点:多个特征联合评价,对子集进行模型训练和评价。
11.3.2.1、LVW
LVW(拉斯维加斯方法):随机产生特征子集,使用交叉验证来估计学习器的误差,当在新特征子集上表现的误差更小,或者误差相当但包含的特征更少,就将新特征子集保留下来。
-
在循环的每一轮随机产生一个特征子集
-
在随机产生的特征子集上通过交叉验证推断当前特征子集的误差
-
进行多次循环,在多个随机产生的特征子集中选择误差最小的特征子集作为最终解*
-
若有运行时间限制,则该算法有可能给不出解
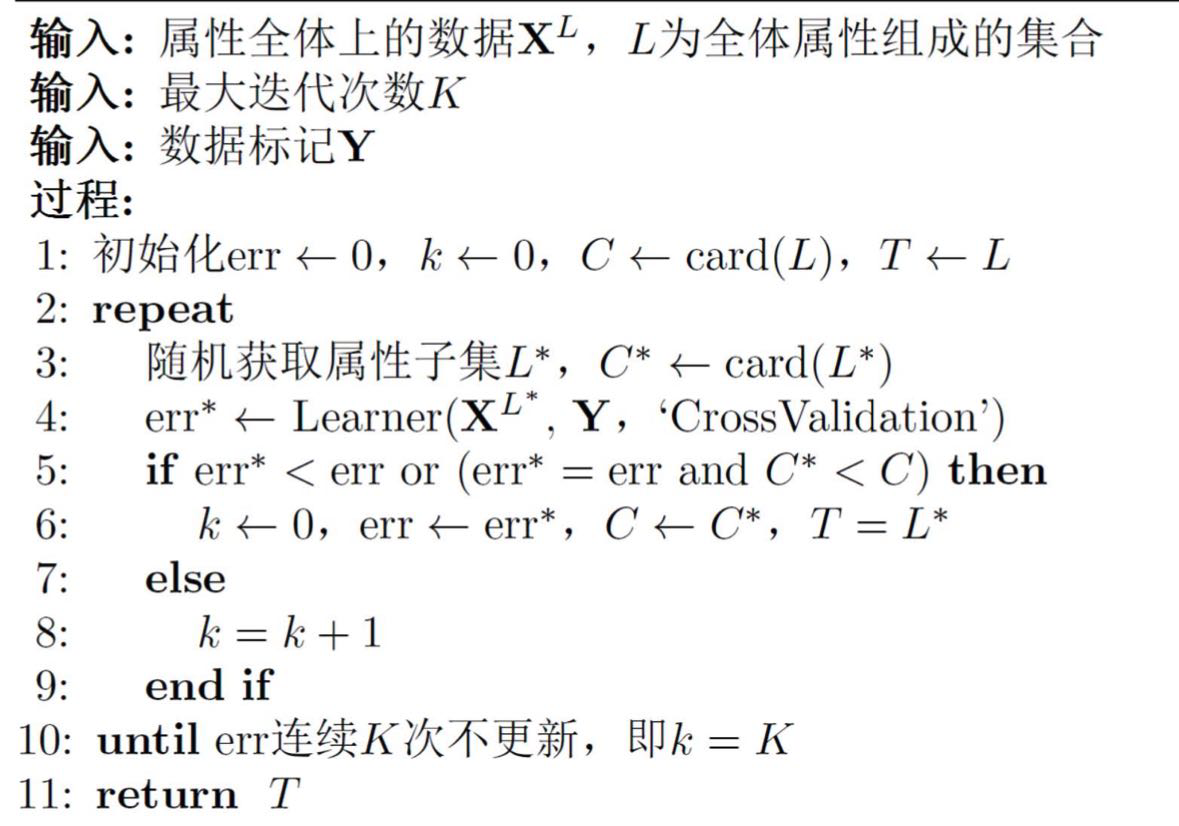
蒙特卡洛:在规定时间给出不符合要求的解。
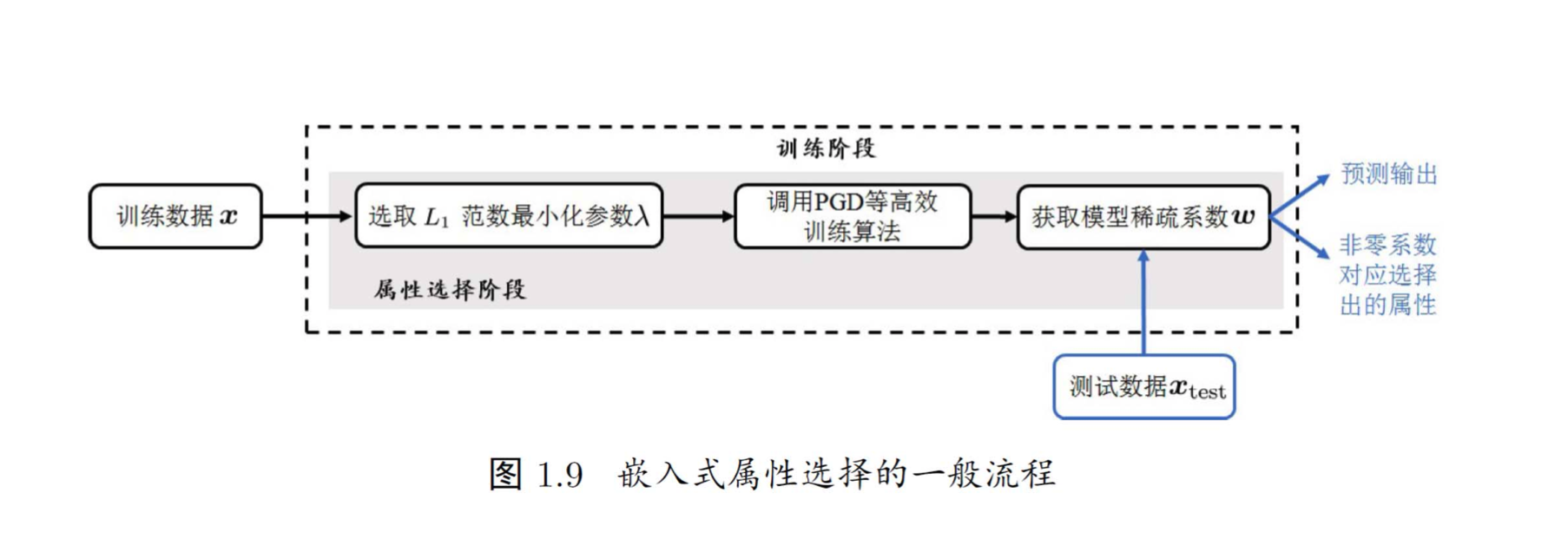
11.3.3、嵌入式
特点:嵌入法将两者融为一体,在同一个优化过程中完成,在学习训练的过程中,自动进行了特征选择。
方法:先使用某些机器学习的算法和模型进行训练,得到各个特征的权值系数,根据系数从大到小选择特征。
为了防止过拟合,会引入正则化项
考虑最简单的线性回归模型,以平方误差为损失函数,并引入\(L_2\)范数正则化项防止过拟合,则有
11.3.3.1、岭回归 (ridge regression) [Tikhonov and Arsenin, 1977]
\(\min _{\boldsymbol{w}} \sum_{i=1}^{m}\left(y_{i}-\boldsymbol{w}^{\top} \boldsymbol{x}_{i}\right)^{2}+\lambda\|\boldsymbol{w}\|_{2}^{2}\)
11.3.3.2、将L2范数替换为L1范数,则有LASSO [Tibshirani, 1996]
易获得稀疏解,是一种嵌入式特 征选择方法
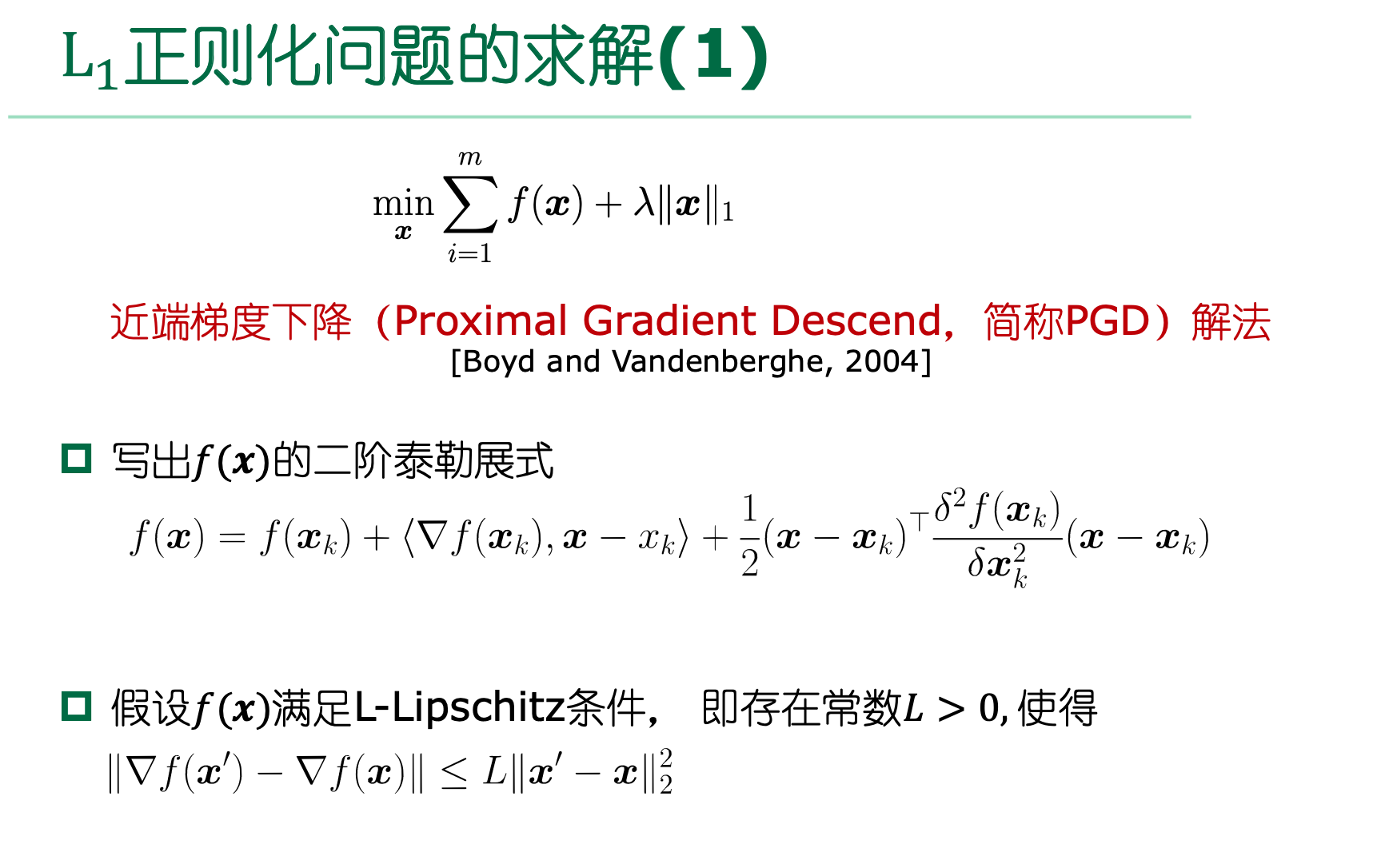
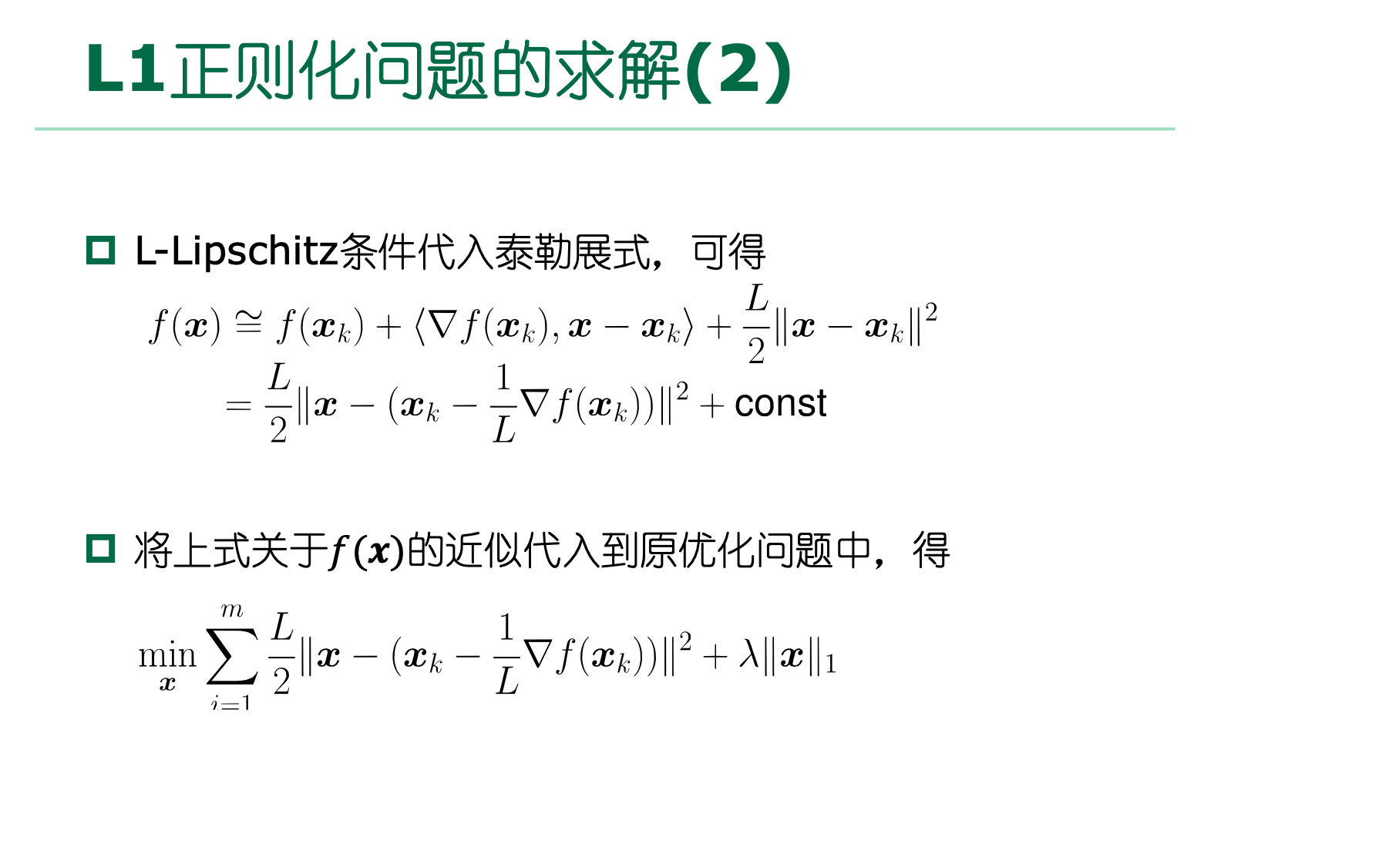
\(\min _{\boldsymbol{w}} \sum_{i=1}^{m}\left(y_{i}-\boldsymbol{w}^{\top} \boldsymbol{x}_{i}\right)^{2}+\lambda\|\boldsymbol{w}\|_{1}\)
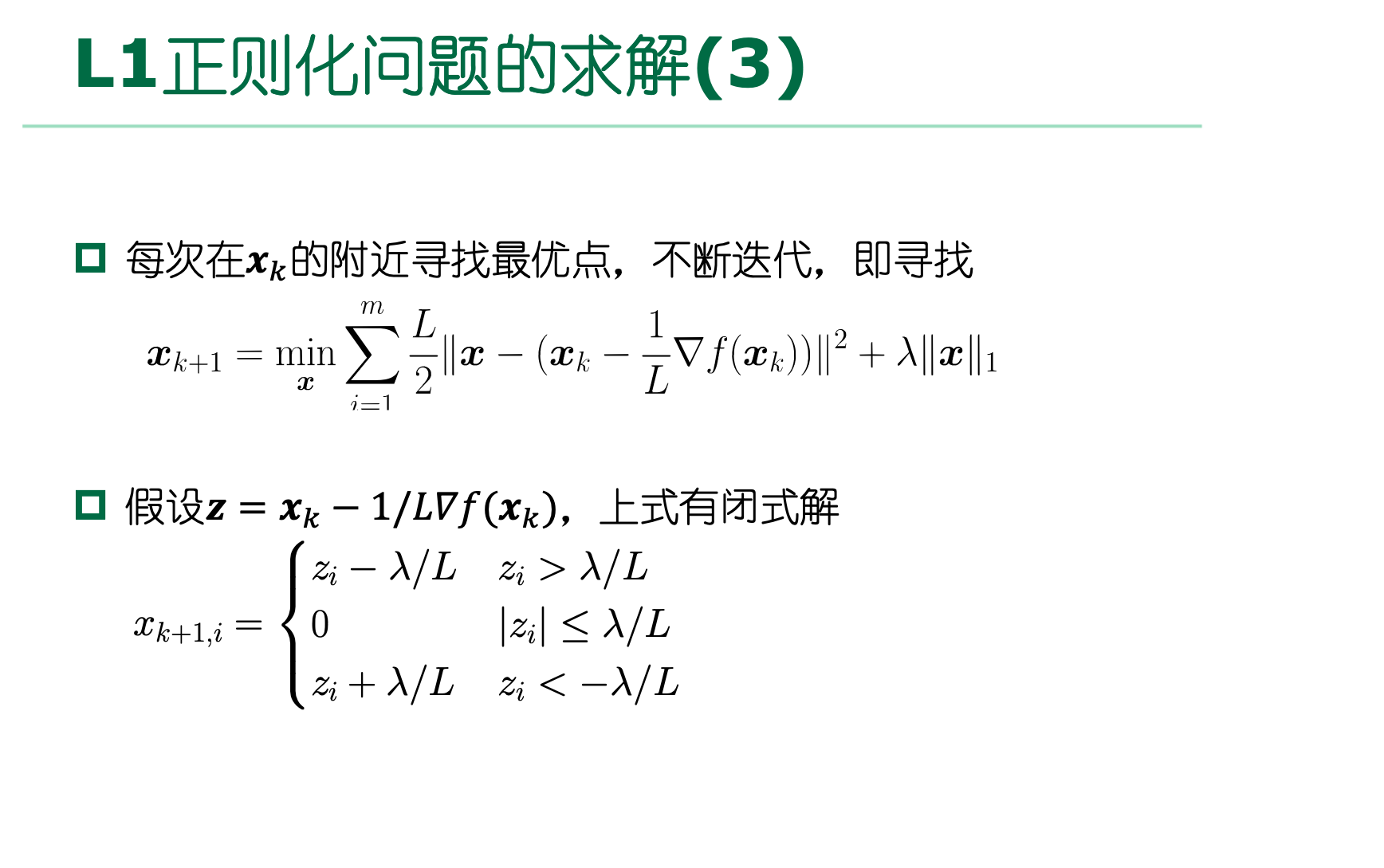
11.4、使用范数正则化易获得稀疏解
L1正则化的解具有稀疏性,可用于特征选择。
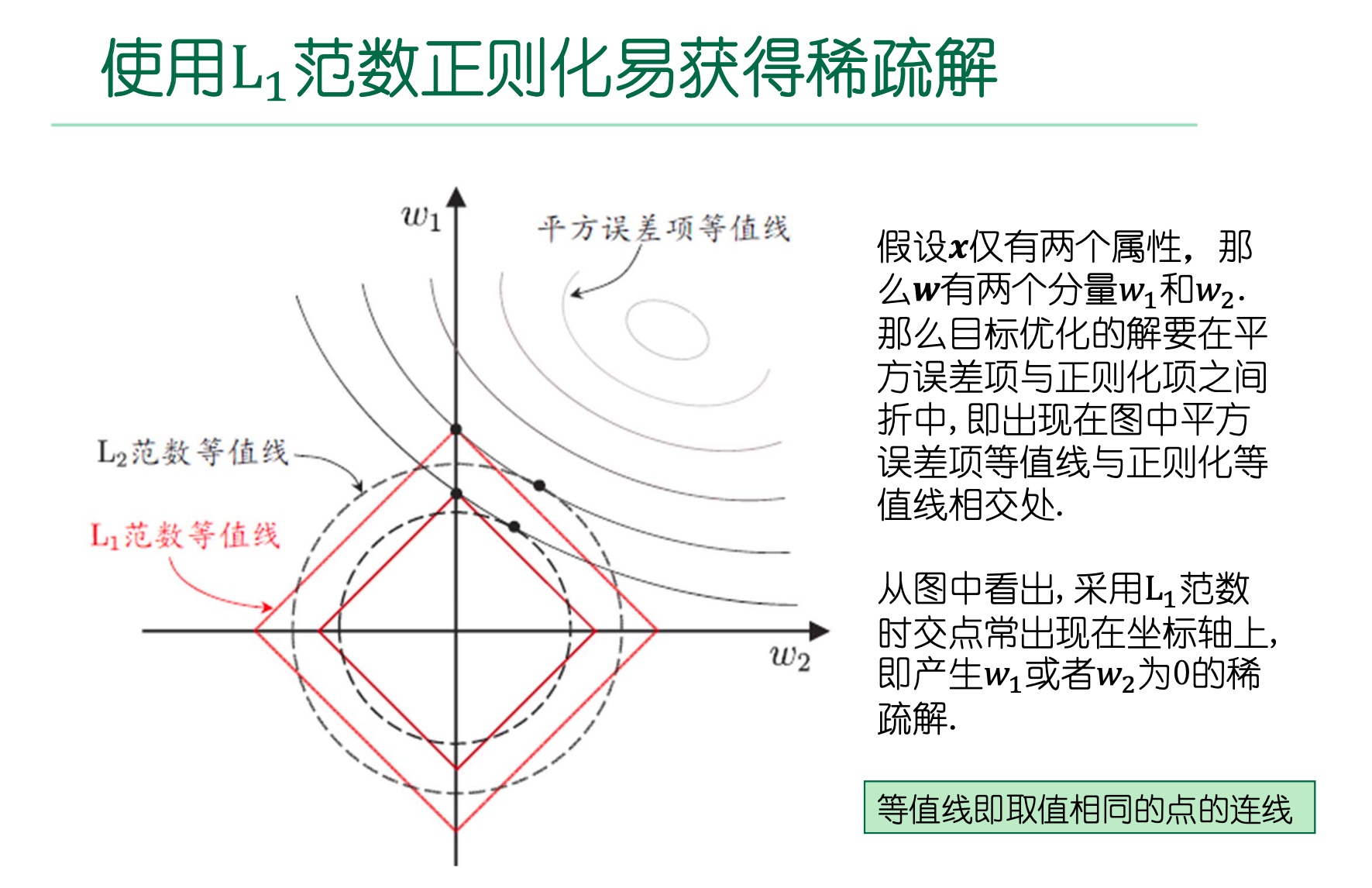
L1正则化方法:近端梯度下降。
L2正则化的解都比较小,抗扰动能力强。
从贝叶斯的角度,L2相当于给θ一个先验分布为高斯分布
11.5、稀疏表示
稀疏表示:特征—>矩阵,矩阵->稀疏矩阵
文本数据线性可分l 存储高效
普通稠密表达的样本找到合适的字典,将样本转化为稀疏表示,这一过程称为字典学习。
压缩感知:利用部分数据恢复全部数据。
𝐴具有“限定等距性”时,可以近乎完美地恢复𝒔
11.6、矩阵补全
NP难问题. 将rank(𝐗)转化为其凸包“核范数”(nuclear norm)
凸优化问题,通过半正定规划求解(SDP,Semi-Definite
十二、半监督学习
12.1、高斯混合模型(Gaussian Mixture Model)通常简称GMM
1、通过观察采样的概率值和模型概率值的接近程度,来判断一个模型是否拟合良好。
2、然后我们通过调整模型以让新模型更适配采样的概率值。反复迭代这个过程很多次,直到两个概率值非常接近时,我们停止更新并完成模型训练。
3、我们要将这个过程用算法来实现,所使用的方法是模型生成的数据来决定似然值,即通过模型来计算数据的期望值。
4、通过更新参数μ和σ来让期望值最大化。
5、这个过程可以不断迭代直到两次迭代中生成的参数变化非常小为止。
12.2、TSVM
https://blog.csdn.net/u011826404/article/details/74358913
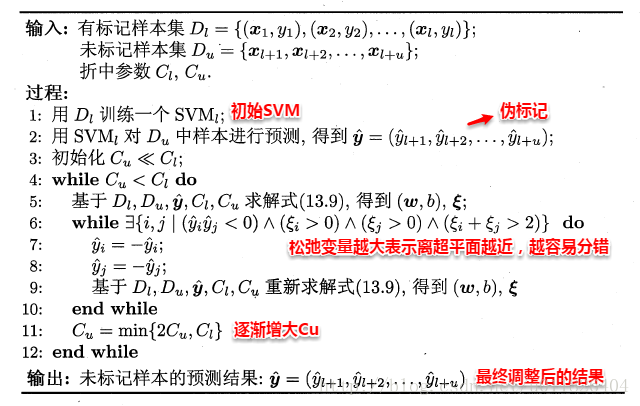
监督学习中的SVM试图找到一个划分超平面,使得两侧支持向量之间的间隔最大,即“最大划分间隔”思想。对于半监督学习,S3VM则考虑超平面需穿过数据低密度的区域。TSVM是半监督支持向量机中的最著名代表,其核心思想是:尝试为未标记样本找到合适的标记指派,使得超平面划分后的间隔最大化。TSVM采用局部搜索的策略来进行迭代求解,即首先使用有标记样本集训练出一个初始SVM,接着使用该学习器对未标记样本进行打标,这样所有样本都有了标记,并基于这些有标记的样本重新训练SVM,之后再寻找易出错样本不断调整。整个算法流程如下所示:
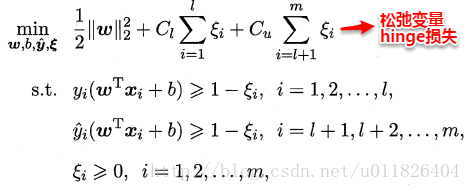
类别不平衡问题:
\(C_u^+=\frac{u_-}{u_+}C_u^-\)
开销巨大
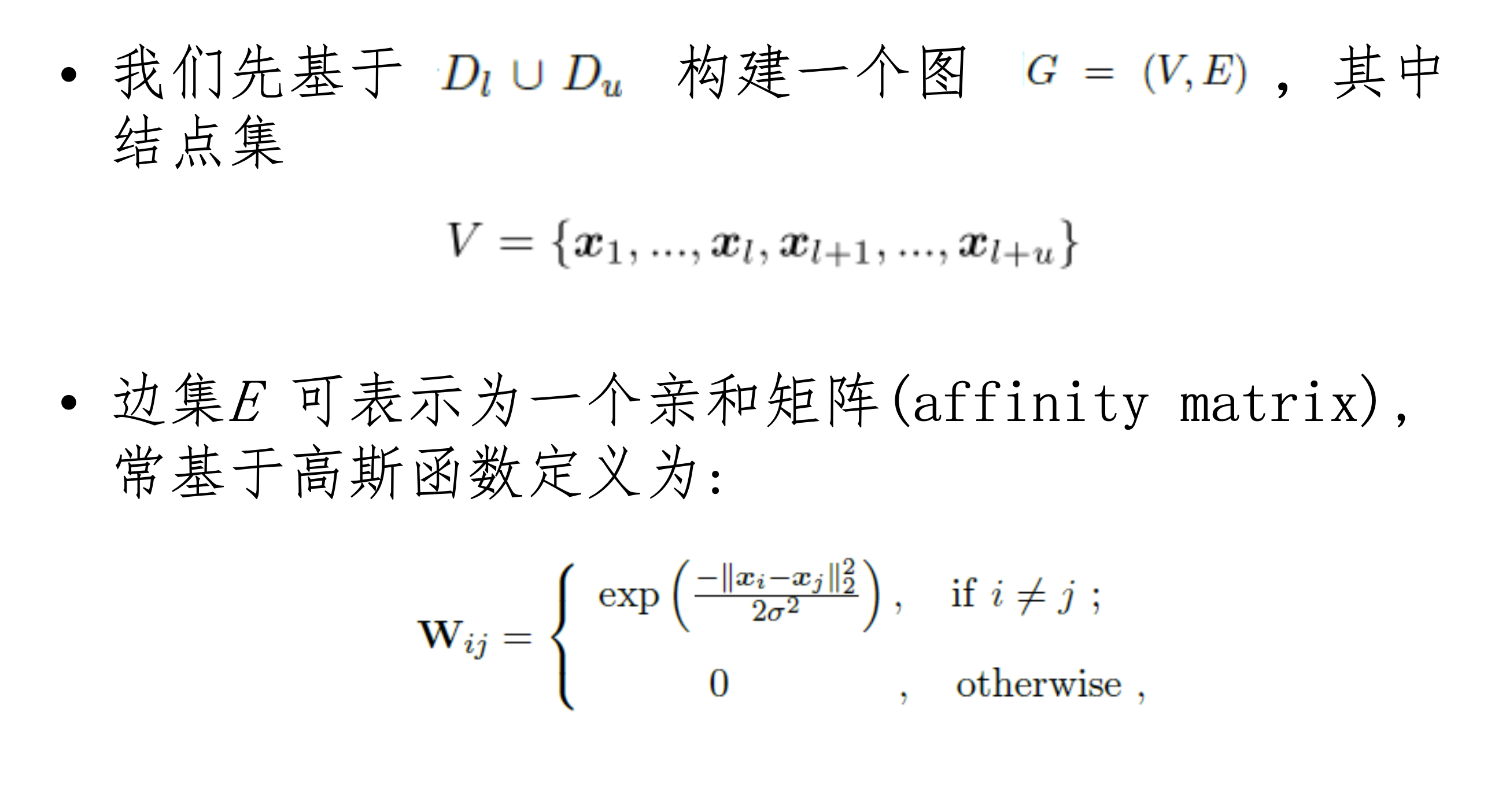
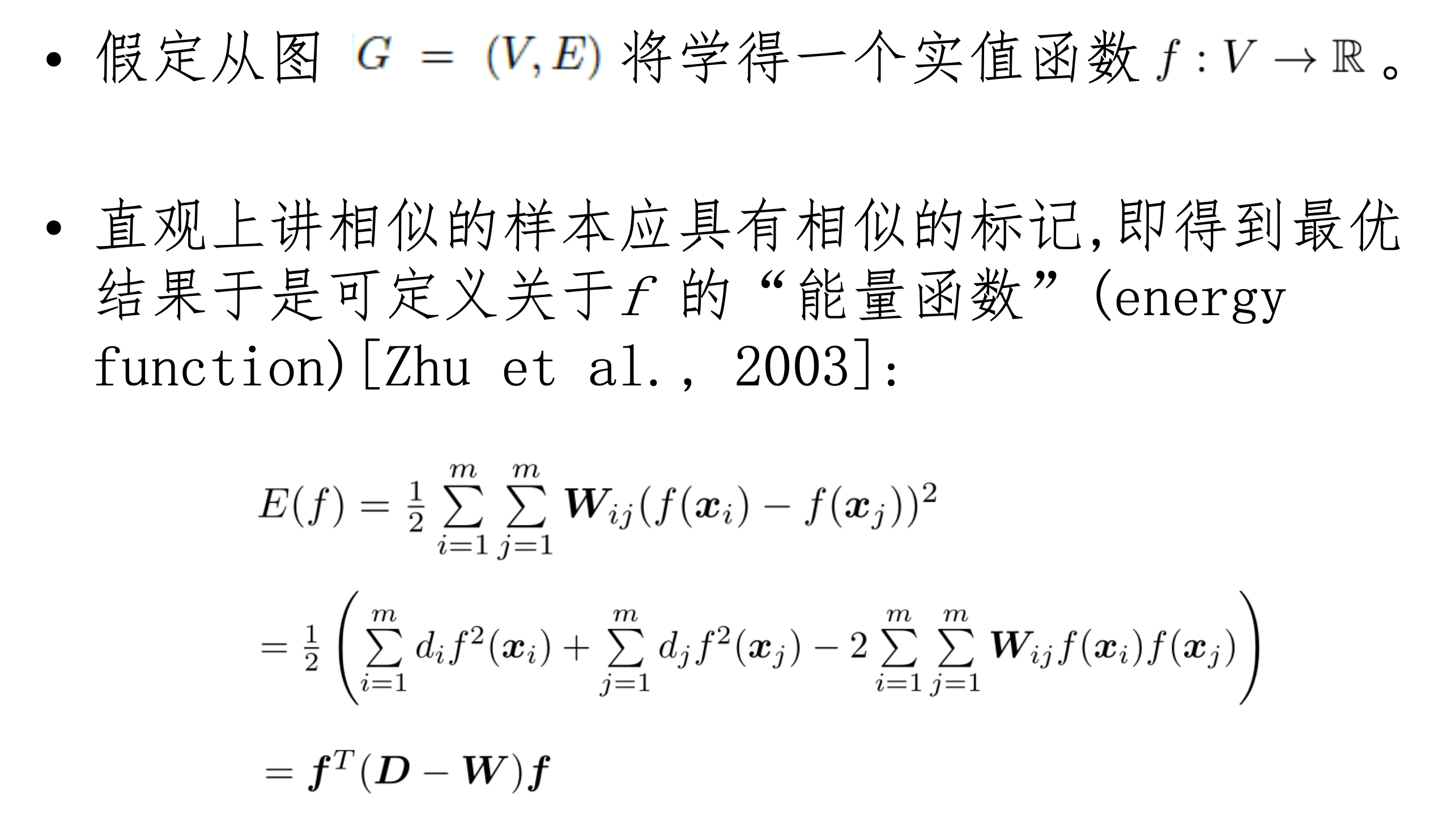
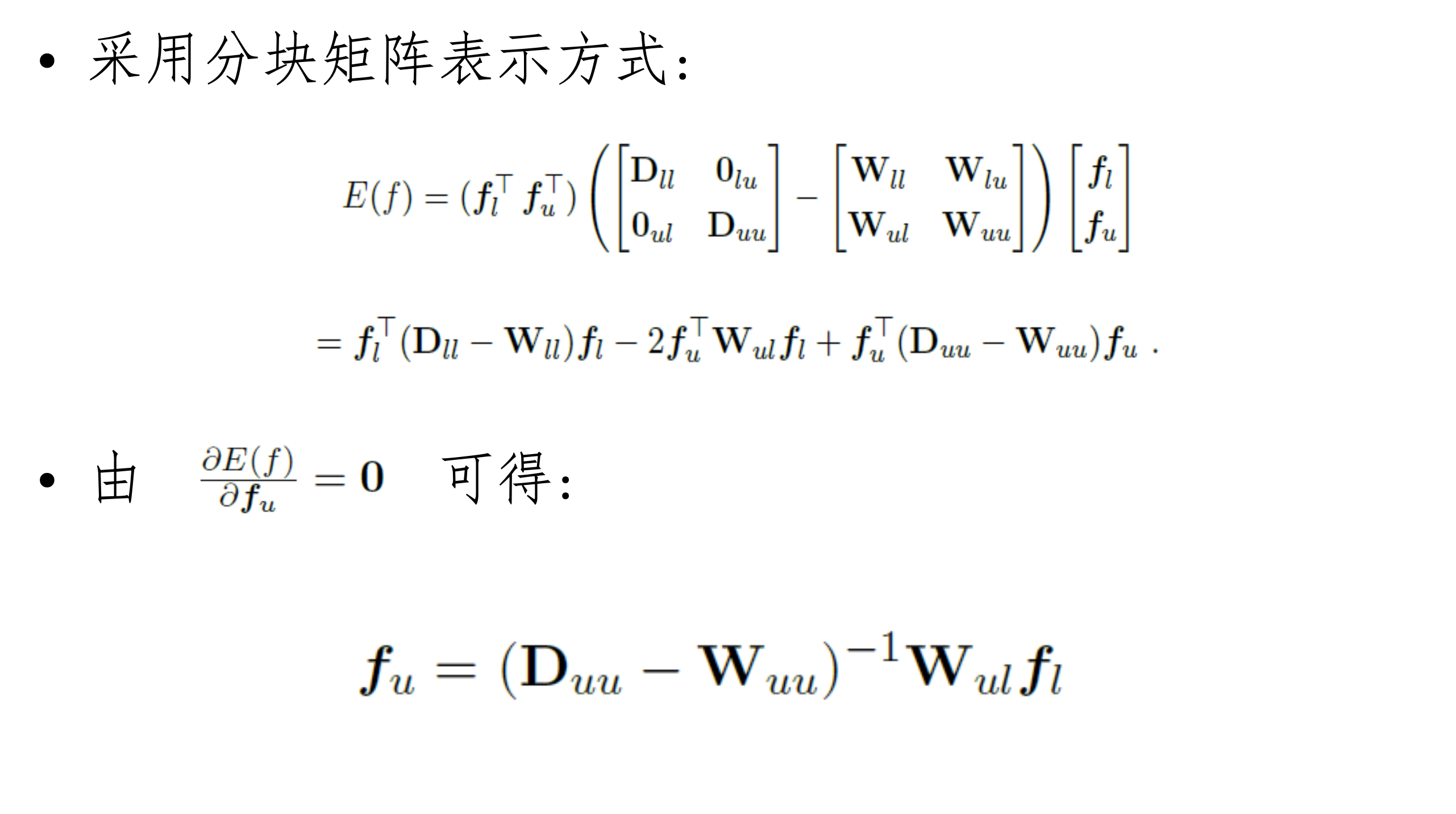
12.3、图半监督学习
12.4、基于分歧
两个“充分”(sufficient)且“条件独立”视图。

两个learner分别给无标记数据生成一个伪标签喂给另一个learner,进行训练。
仅需弱学习器之间具有显著的分歧(或差异), 即可通过相互提供伪标记样本的方式来提高泛化性能。
特点:
-
只需采用合适的基学习器,学习方法简单有效、理论基础相对坚实、适用范围较为广泛。
-
需能生成具有显著分歧、性能尚可的多个学习器,
-
但当有标记样本很少、尤其是数据不具有多视图时, 要做到这一点并不容易。
12.5、半监督聚类
基于无监督,有标记样本提供额外的监督信息。
-
勿连和必连:约束k均值。选择最近簇时出错不满足要求则选择次近簇。约束k均值算法。
- 该算法是k均值算法的扩展,它在聚类过程中要确保“必连 ”关系集合与“勿连”关系集合中的约束得以满足,否则将返回错误提示。
-
类标:第二种监督信息是少量有标记样本。即假设少量有标记样本属于k个聚类簇。
- 约束种子k均值。作为聚类种子初始化,更新簇时不计算,计算簇中心计算,
十三、概率图模型:基本概念和方法
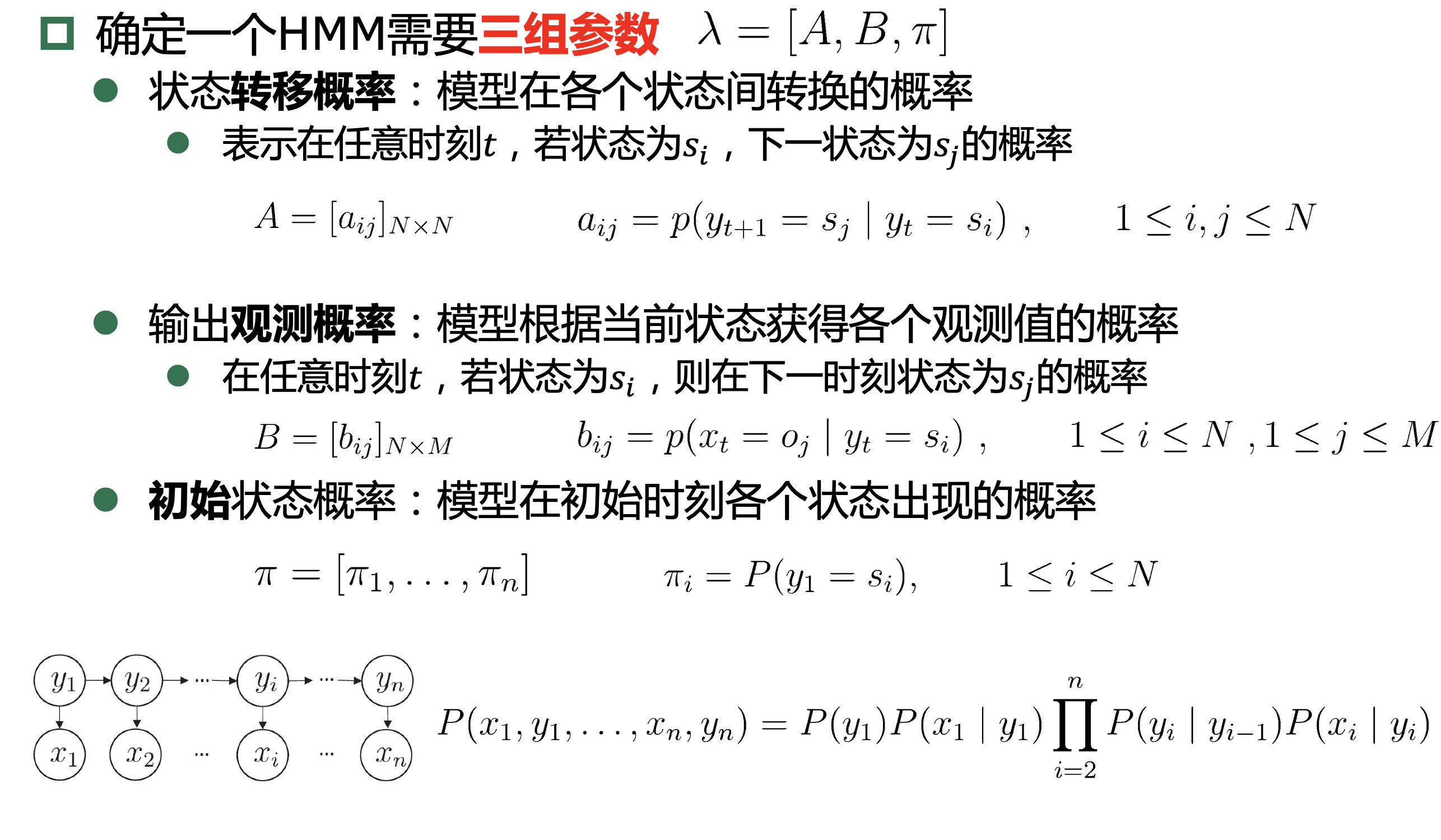
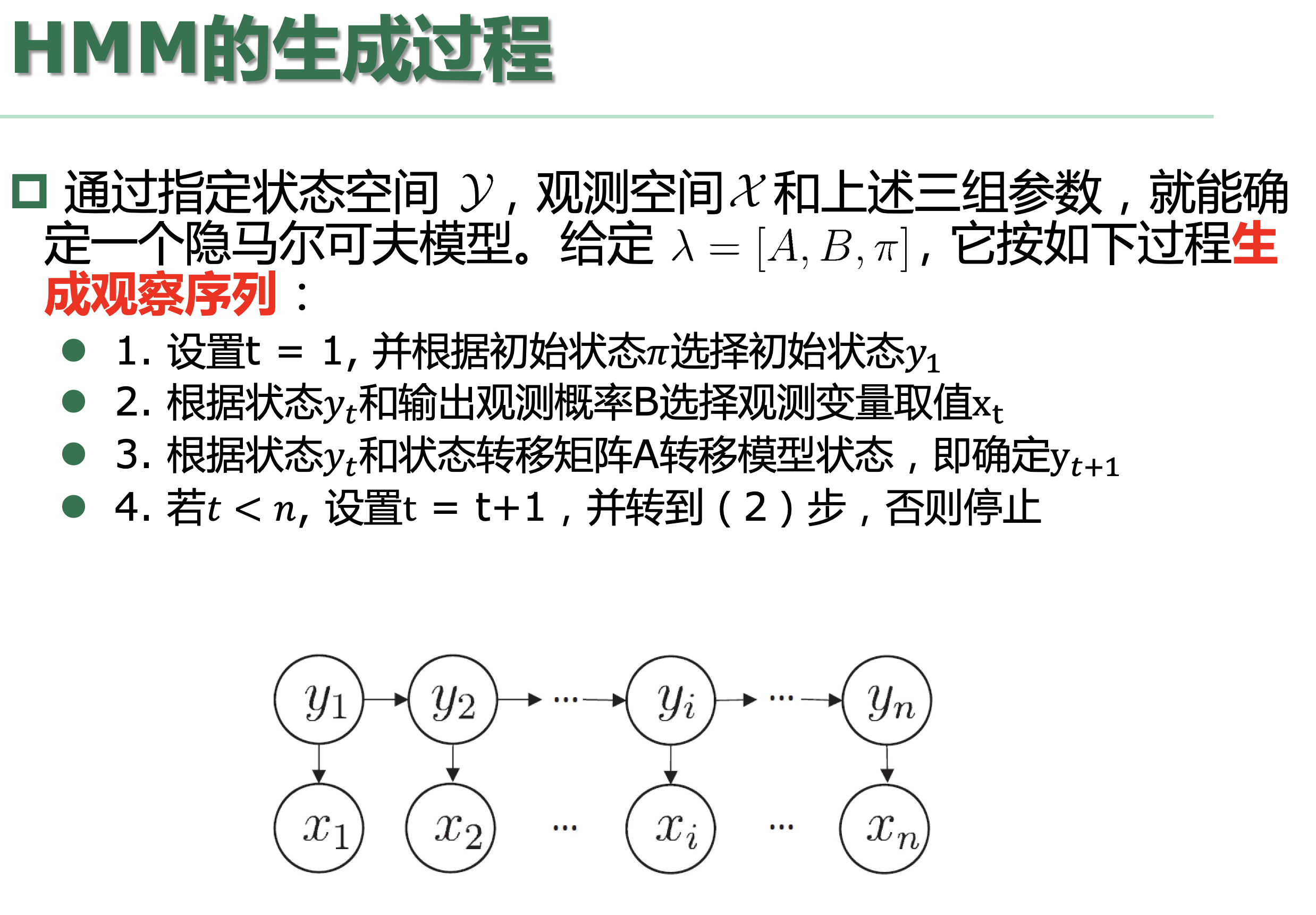
13.1、隐马尔可夫模型(动态贝叶斯网)
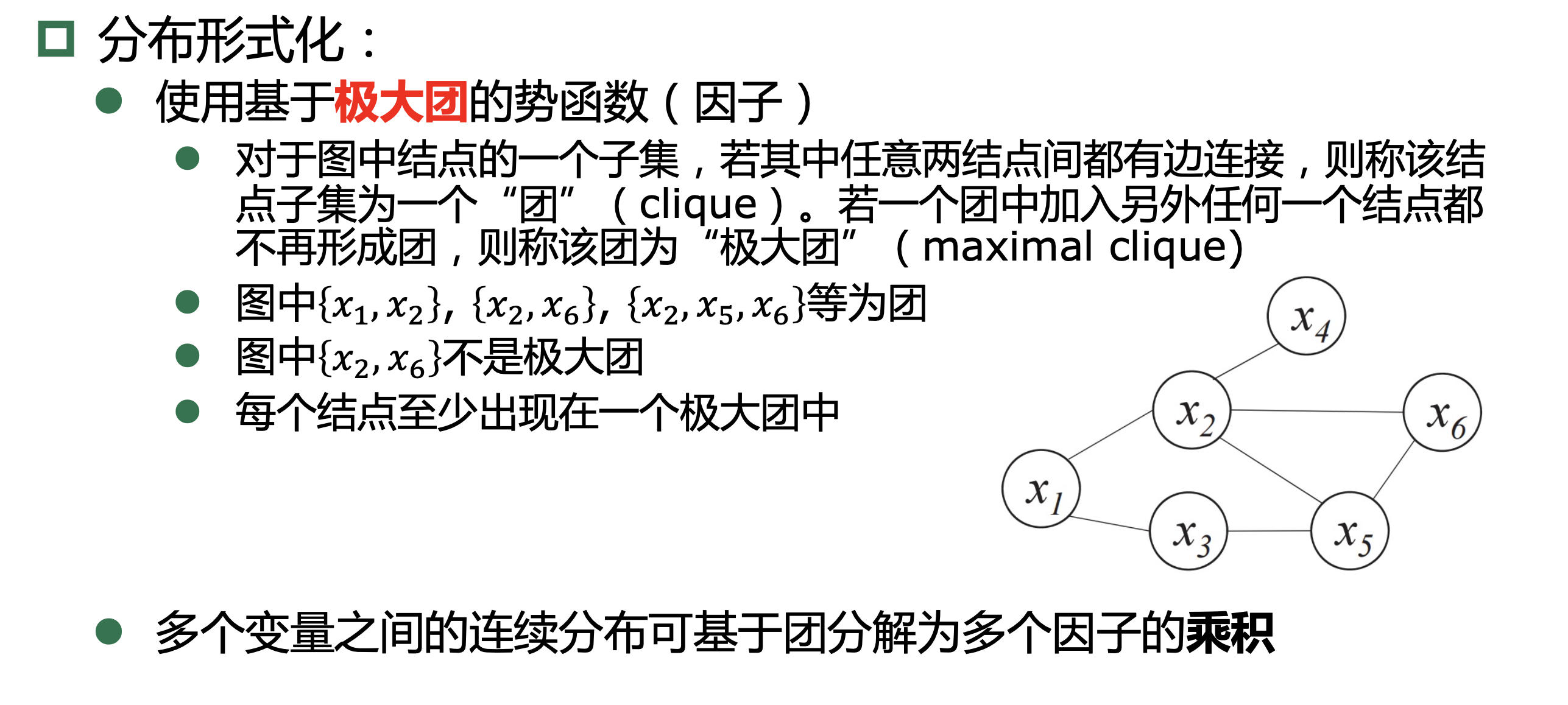
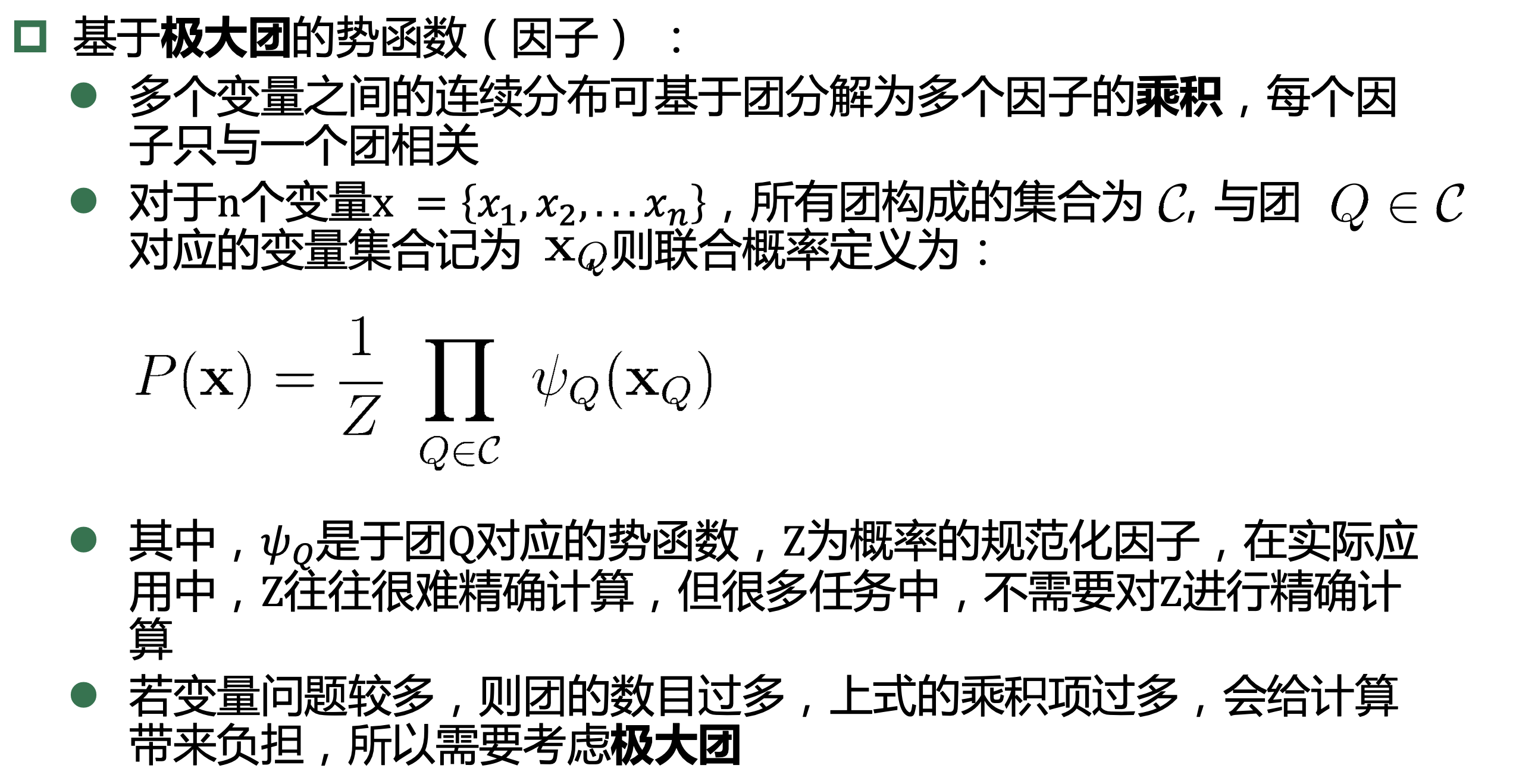
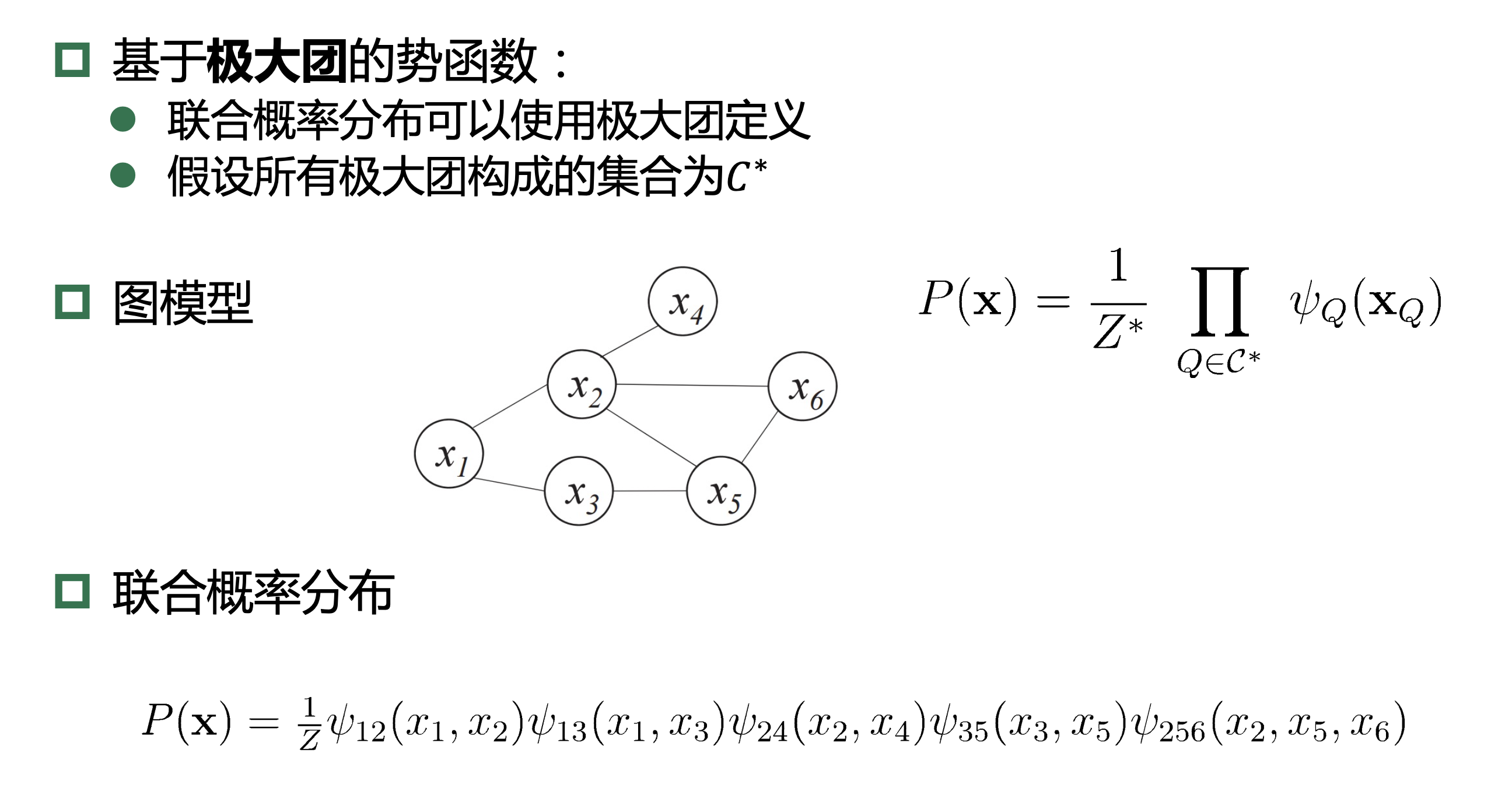
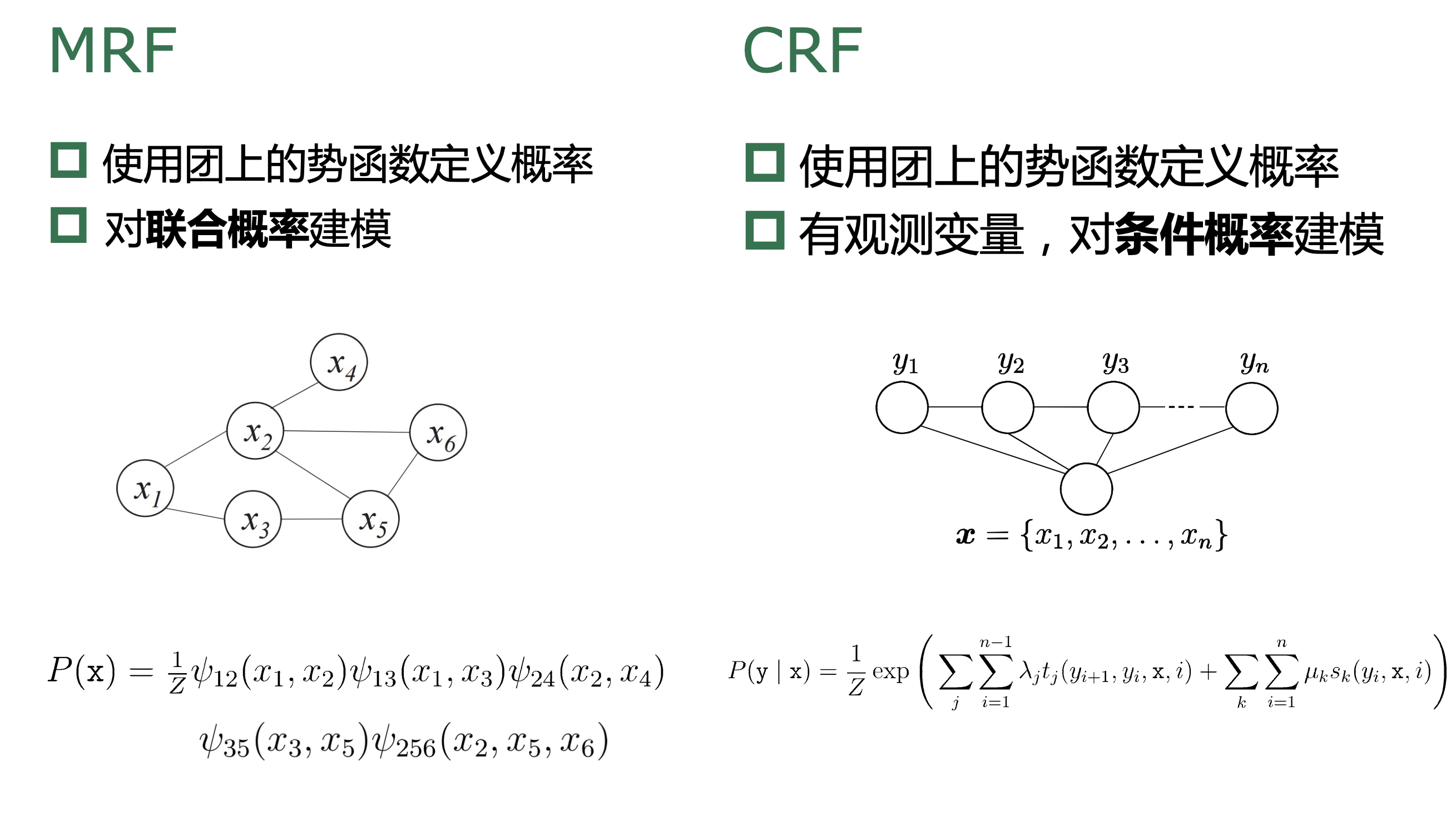
13.2、马尔可夫随机场
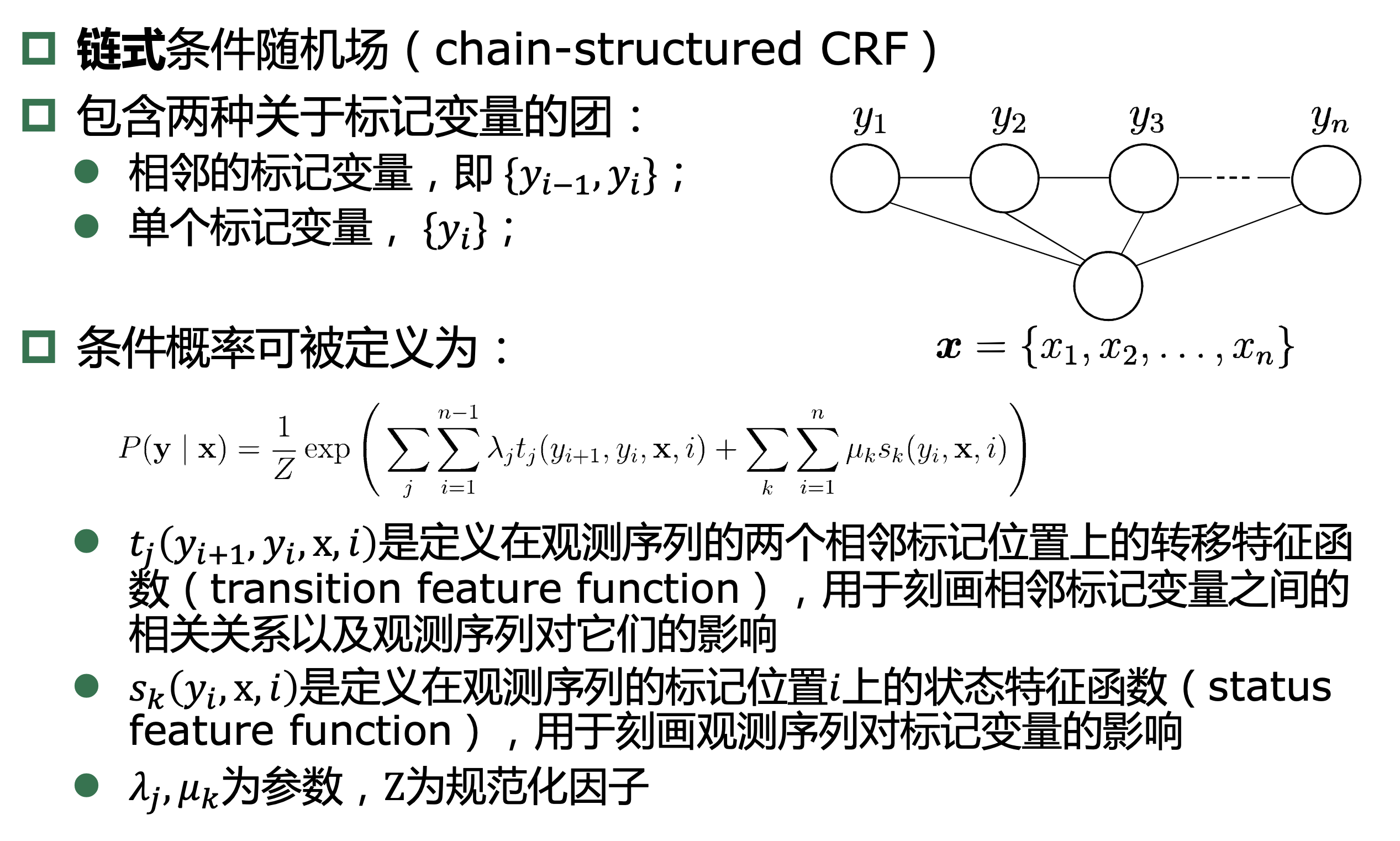
13.3、条件随机场
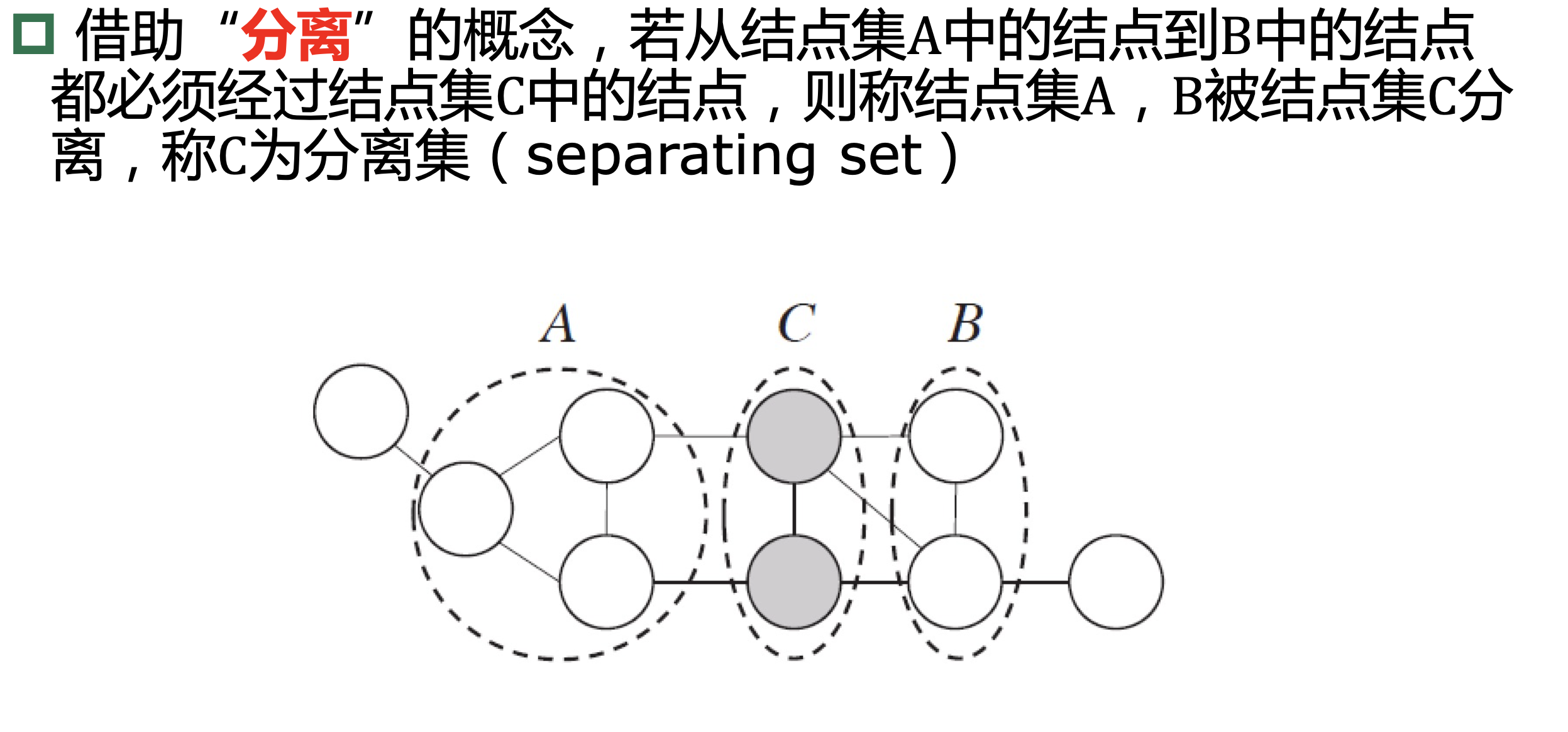
条件随机场是一种判别式 无向图模型(可看作给定观测值的MRF)
条件随机场对多个变量 给定相应观测值后的条件概率进行建模,若令\(x= x_1,x_2,...,x_n\)为观测序列,\(y= y_1,y_2,...,y_n\)为对应的标记序列, CRF的目标是构 建条件概率模型\(P(y|x)\)。
13.4、学习与推断
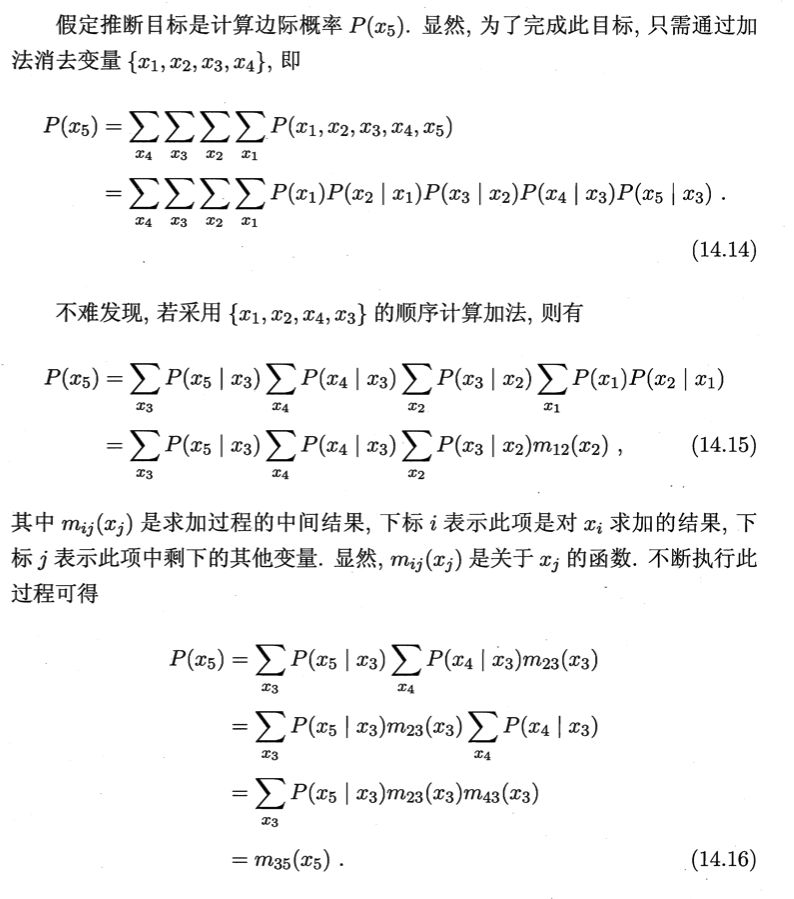
13.4.1、精确推断
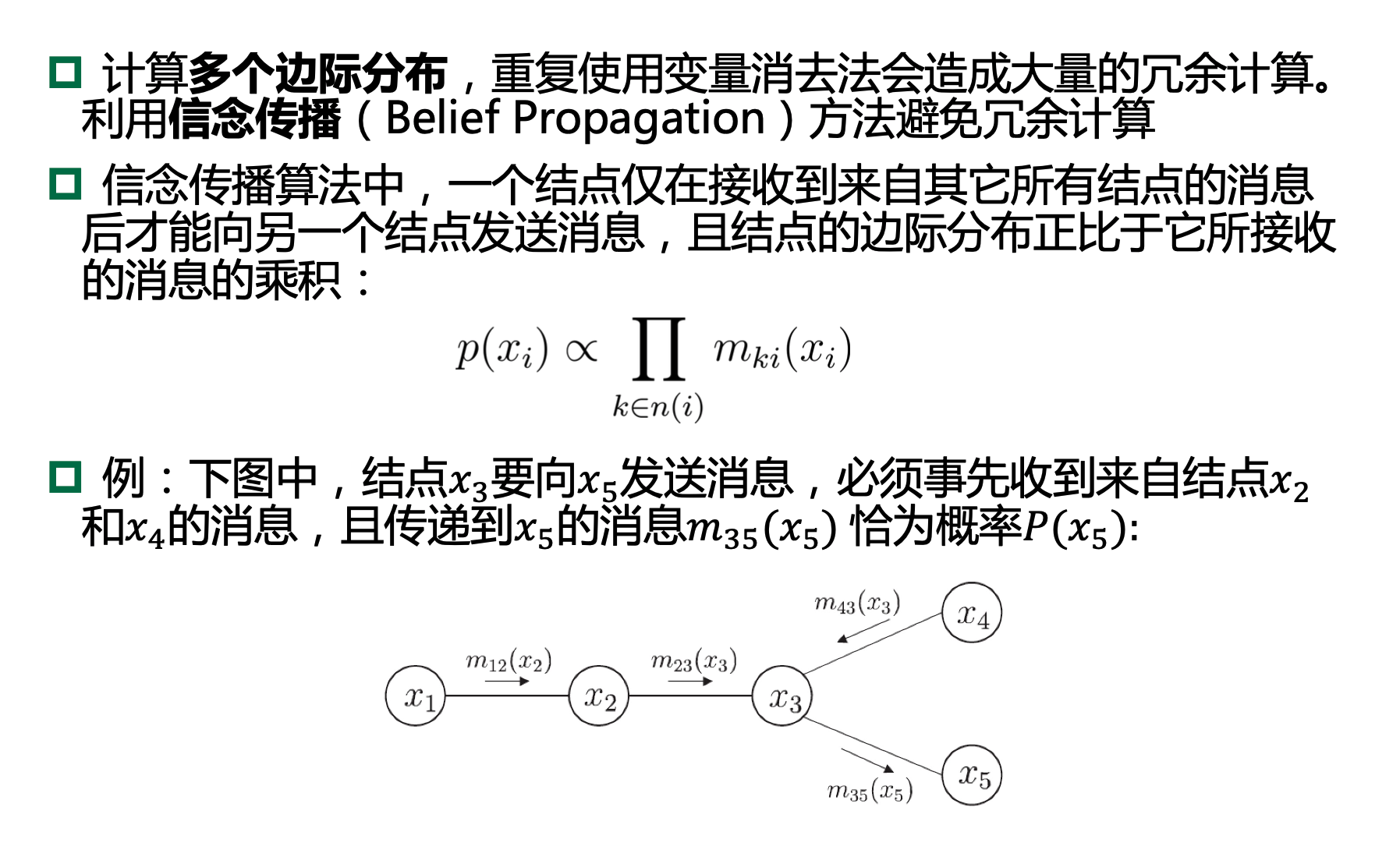
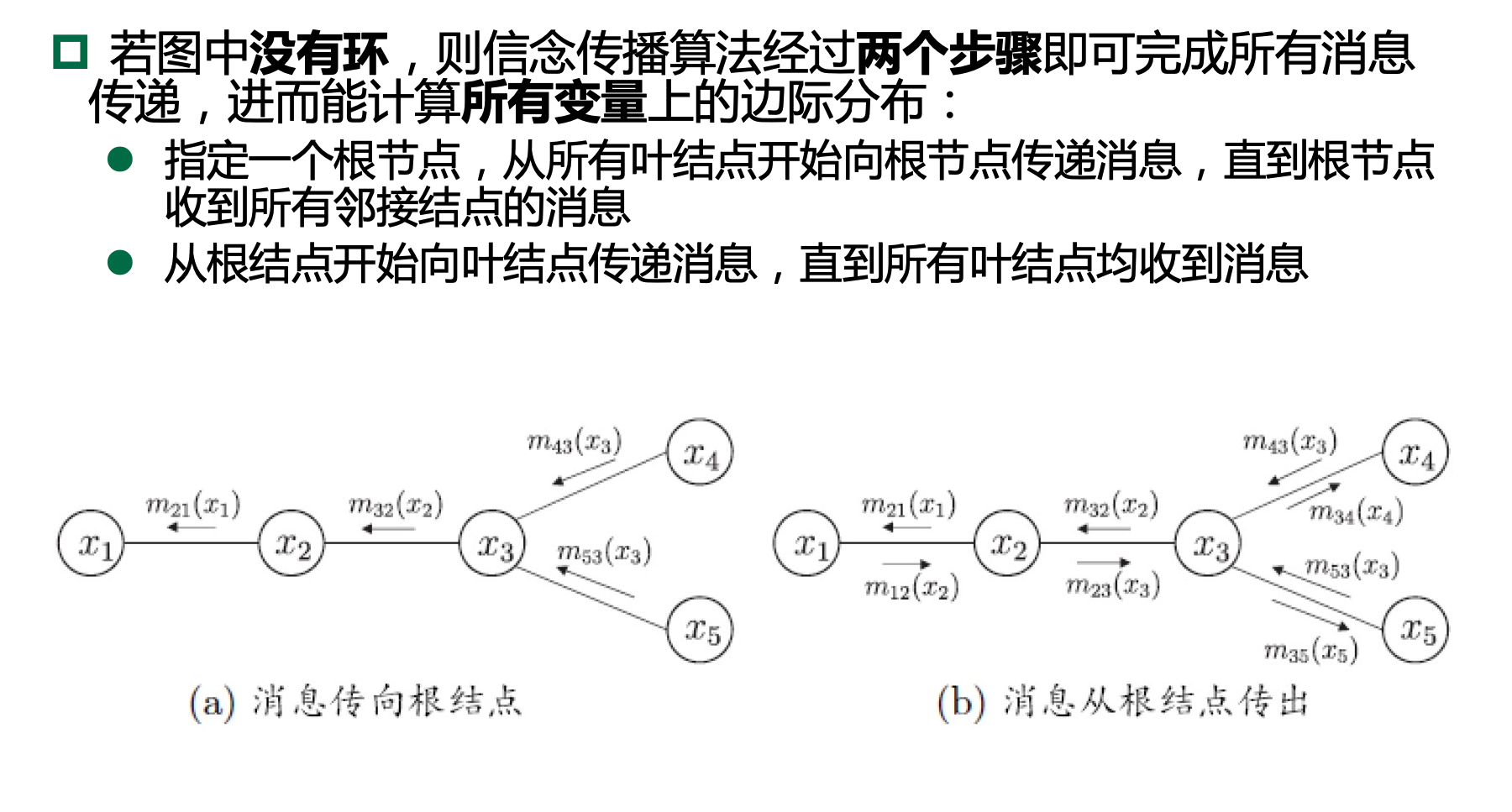
13.4.2、信念传播
13.4.3、近似推断
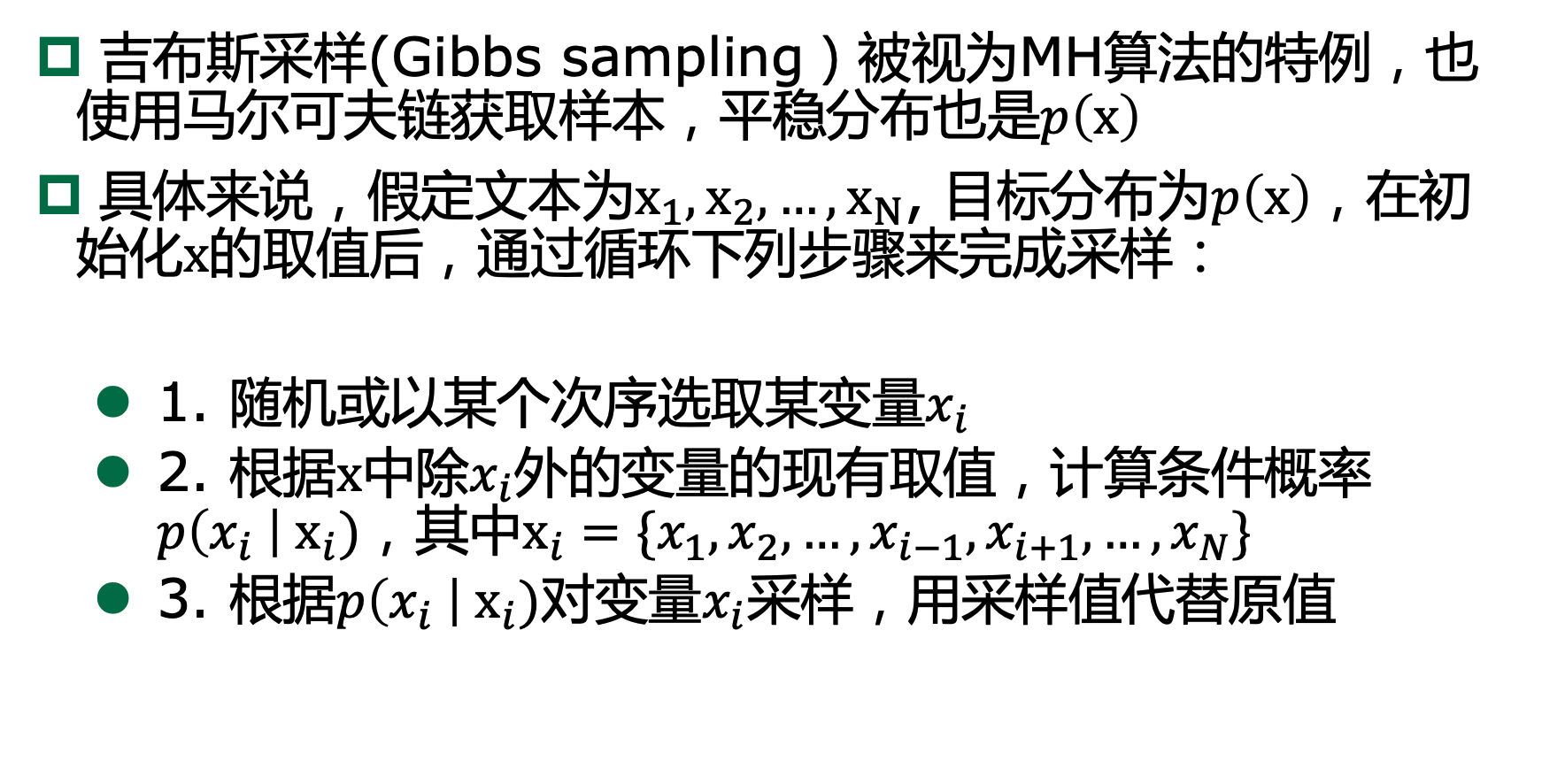
采样法(sampling):通过使用随机化方法完成
在很多任务中,我们关心某些概率分布并非因为对这些概率分布本身感兴趣,而是要基于它们计算某比期望,并且还可能进一步基于这些期望做出决策.
采样法正是基于这个思路.具体来说,假定我们的目标是计算函数 f(x) 在 概率密度函数 p(x) 下的期望
则可根据 p(x) 抽取一组样本 \(\left\{x_{1}, x_{2}, \ldots, x_{N}\right\}\), 然后计算 f(x) 在这些样本上的均值
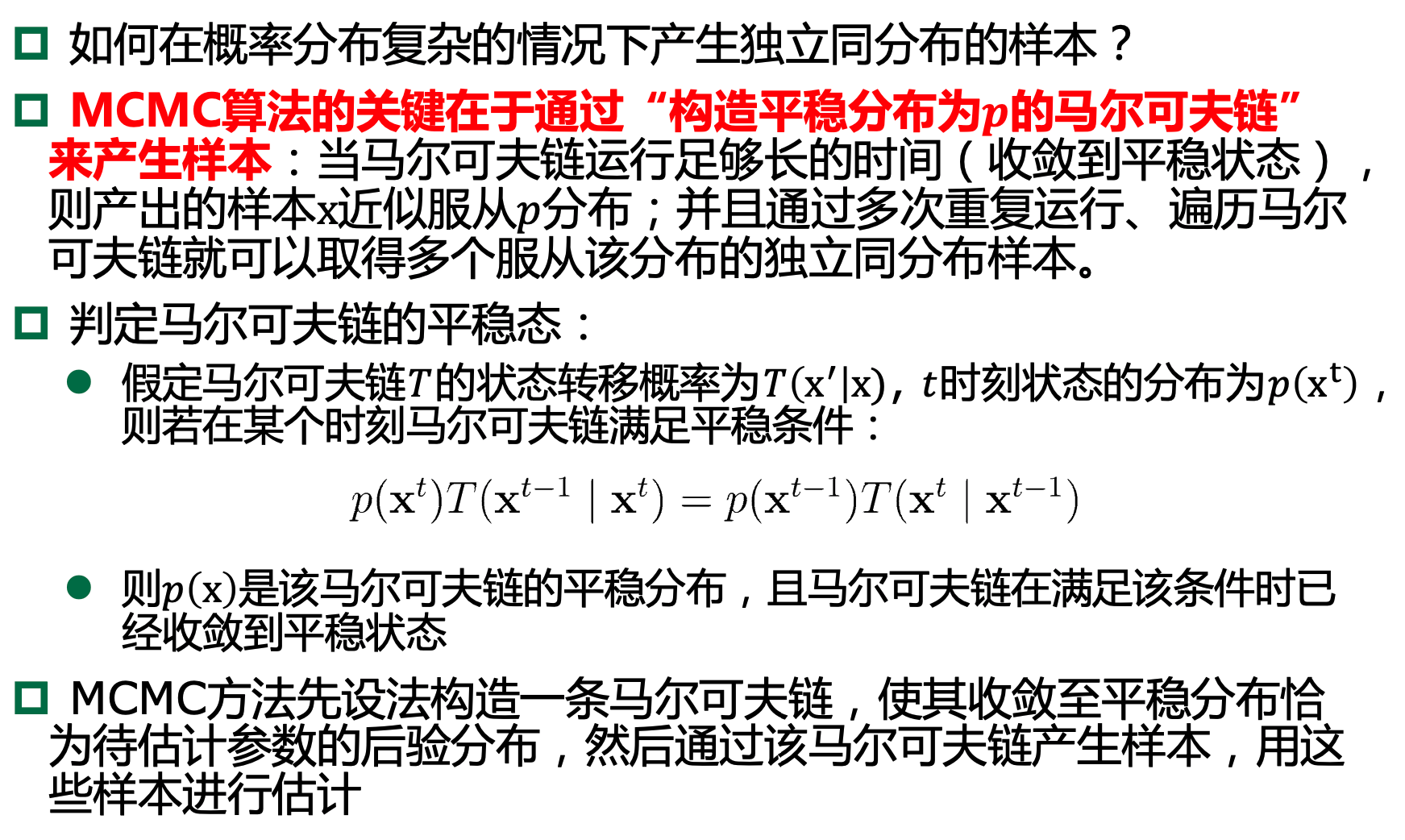
13.4.3.1、MCMC采样
马尔可夫链蒙特卡罗 (Markov Chain Monte Carlo,简称 MCMC)方法:
给定连续变量 \(x\in X\)的概率密度函数 p(x),x在区间 A 中的概率可计算为
若有函数 \(f: X \mapsto \mathbb{R}\), 则可计算 \(f(x)\) 的期望
若𝑥为高维多元 变量且服从一个复杂分布,积分操作会很困难。
p MCMC先构造出服从𝒑分布的独立同分布随机变量\(\mathbf{X}_{1}, \mathbf{X}_{2}, \ldots, \mathbf{X}_{\mathbf{N}}\),再得到无偏估计
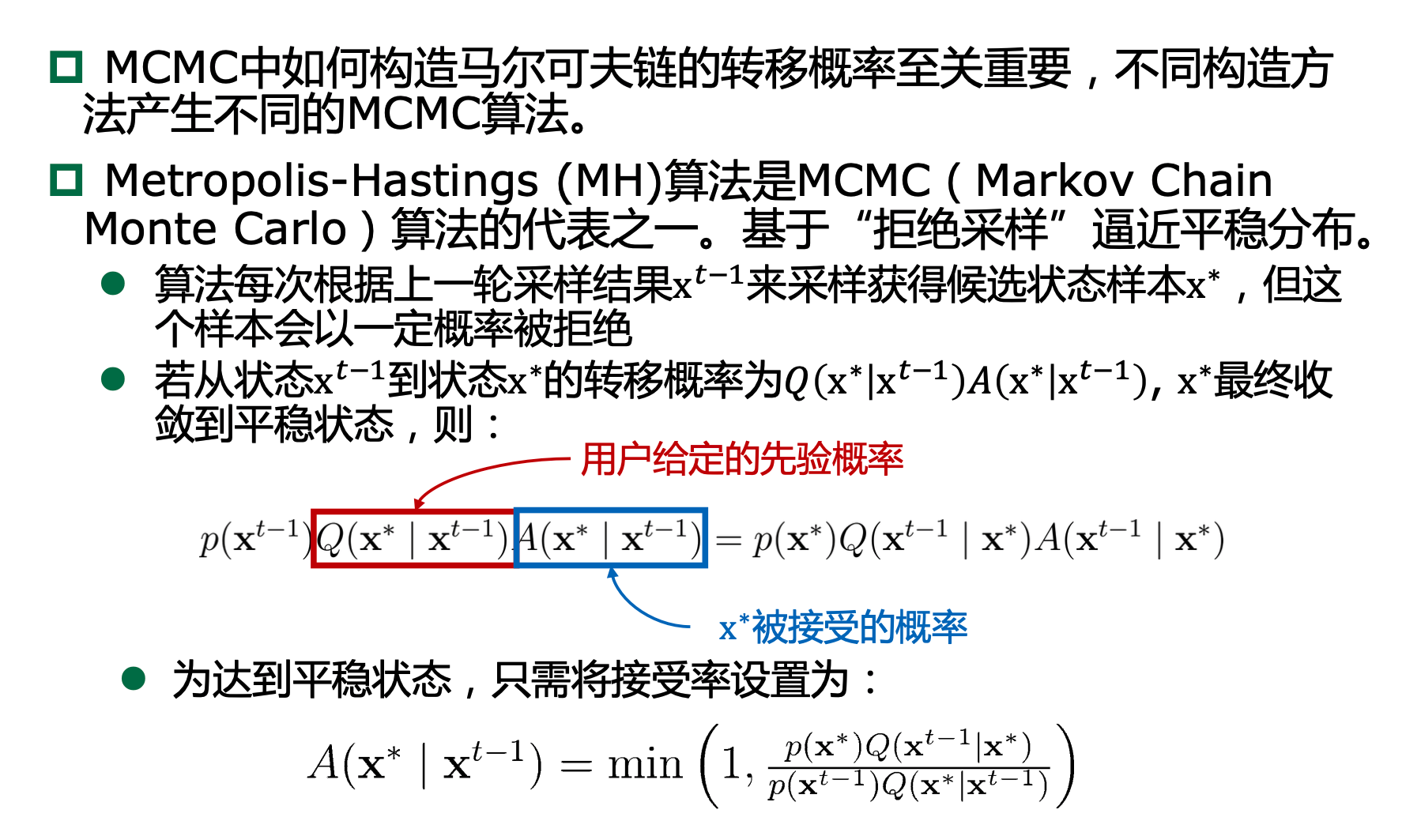
13.4.3.2、MH算法
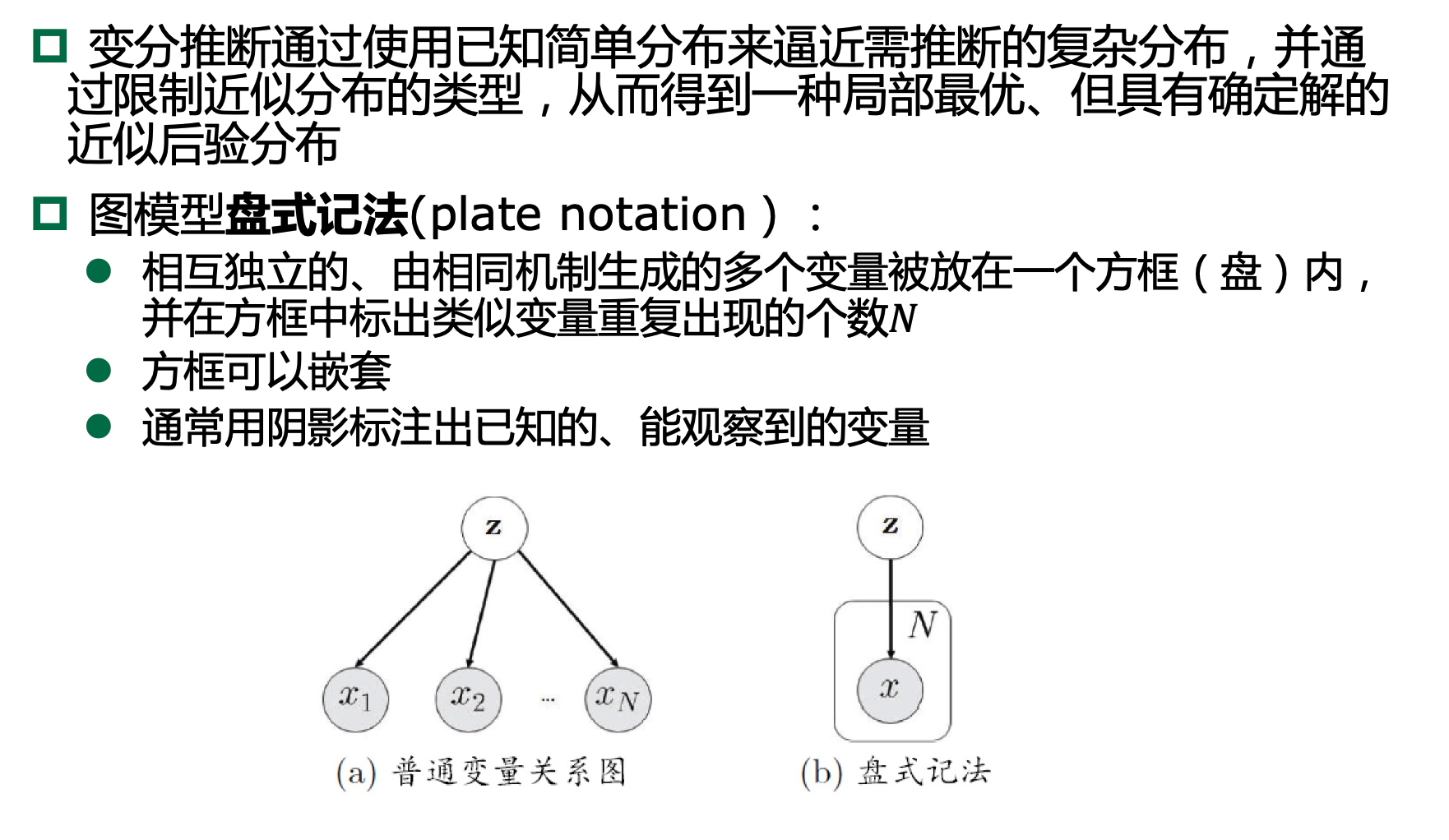
13.4.4、变分推断
13.5、话题模型
十四、强化学习简介
14.1、MDP
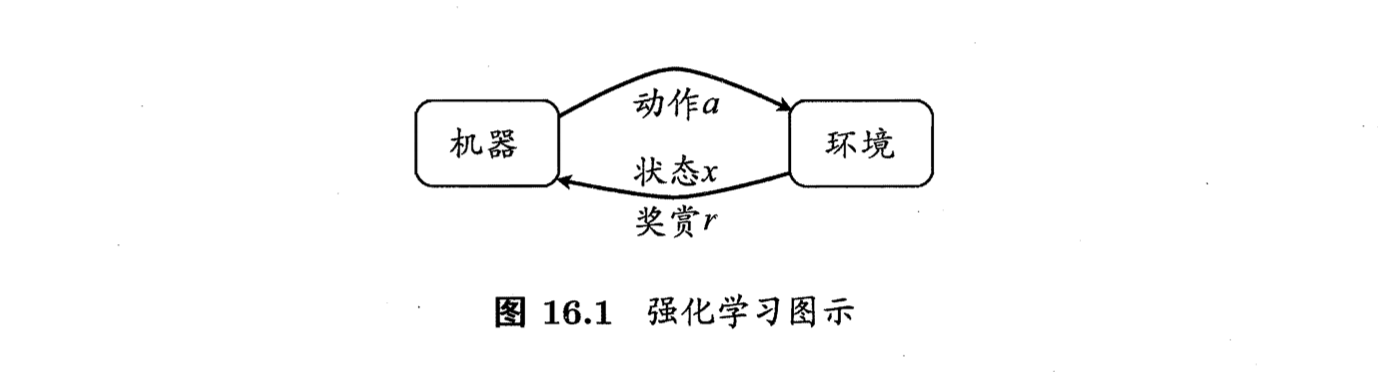
1、机器处于环境 \(E\) 中, 状态空间为 \(X\), 其中每个状态 \(x \in X\) 是机器感知到的环境的描述,
2、如在种瓜任务 上这就是当前瓜苗长势的描述; 机器能采取的动作构成了动作空间 \(A\), 如种瓜过程中有浇水、施不同的肥、使用不同的农药等多种可供选择的动作;
3、若某个 动作 \(a \in A\) 作用在当前状态 \(x\) 上, 则潜在的转移函数 \(P\) 将使得环境从当前状态 按某种概率转移到另一个状态, 如瓜苗状态为缺水, 若选择动作浇水, 则瓜苗长势会发生变化, 瓜苗有一定的概率恢复健康, 也有一定的概率无法恢复;
4、在转移 到另一个状态的同时, 环境会根据潜在的“奖赏” \((\mathrm{reward})\) 函数 \(R\) 给机器奖赏,如保持瓜苗健康对应奖赏 \(+1\), 瓜苗调零对应奖赏 \(-10\), 最终种出了 好瓜对应奖赏 \(+100 .\)
5、综合起来, 强化学习任务对应了四元组 \(E=\langle X, A, P, R\rangle\), 其中 \(P: X \times A \times X \mapsto \mathbb{R}\) 指定了状态转移概率, \(R: X \times A \times X \mapsto \mathbb{R}\) 指定了奖赏;
6、在有的应用中, 奖赏函数可能仅与状态转移有关, 即 \(R: X \times X \mapsto \mathbb{R} .\)
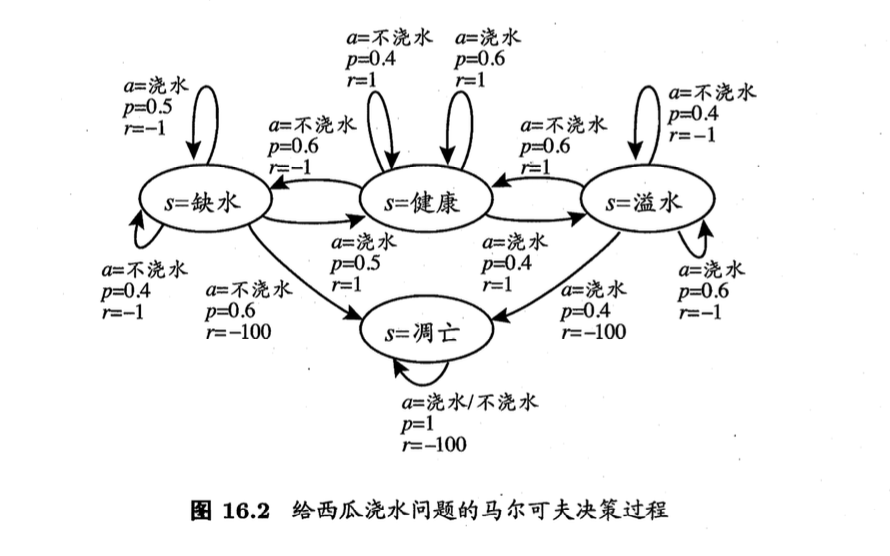
图 \(16.2\) 给出了一个简单例子:给西瓜浇水的马尔可夫决策过程。
1、该任务中只有四个状态(健康、缺水、溢水、凋亡)和两个动作(浇水、不浇水)
2、在每一步转移后,若状态是保持瓜商健康则获得奖赏 1,瓜苗缺水或溢水奖赏为-1,这时通过浇水或不浇水可以恢复健康状态,当瓜苗凋亡时奖赏是最小值 -100且无法恢复.
3、圈中箭头表示状态转移,箭头旁的 α,p,r 分别表示导致状态转移的动作、转移概率以及返回的奖赏.
4、容易看出,最优策略在"健康"状态选择动 作"浇水"、在"溢水"状态选择动作"不浇水"、在"缺水"状态选择动 作"浇水"、在"调亡"状态可选择任意动作.
1、机器要做的是通过在环境中不断地尝试而学得一个 “策略”(policy) \(\pi\)
2、根据这个策略, 在状态 \(x\) 下就能得知要执行的动作 \(a=\pi(x)\), 例如看到瓜苗状态是缺水时,能返回动作“浇水".
3、策略有两种表示方法: 一种是将策略表示为函数 \(\pi: X \mapsto A\), 确定性策略常用这种表示。
4、另一种是概率表示 \(\pi: X \times A \mapsto \mathbb{R}\), 随机性策略常用这种表示。
5、\(\pi(x, a)\) 为状态 \(x\) 下选择动作 \(a\) 的概率, 这里必须有 \(\sum_{a} \pi(x, a)=1\)。
6、策略的优劣取决于长期执行这一策略后得到的累积奖赏,例如某个策略使 得瓜苗枯死, 它的累积奖赏会很小, 另一个策略种出了好瓜, 它的累积奖赏会很大.
7、在强化学习任务中, 学习的目的就是要找到能使长期累积奖赏最大化的策 略. 长期累积奖赏有多种计算方式
8、常用的有“ \(T\) 步累积奖赏” \(\mathbb{E}\left[\frac{1}{T} \sum_{t=1}^{T} r_{t}\right]\) 和“ \(\gamma\) 折扣累积奖赏" \(\mathbb{E}\left[\sum_{t=0}^{+\infty} \gamma^{t} r_{t+1}\right]\), 其中 \(r_{t}\) 表示第 \(t\) 步获得的奖赏值, \(\mathbb{E}\) 表 示对所有随机变量求期望.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号