模糊系统
模糊系统包含三个主要组件:模糊器、模糊推理机、解模糊器
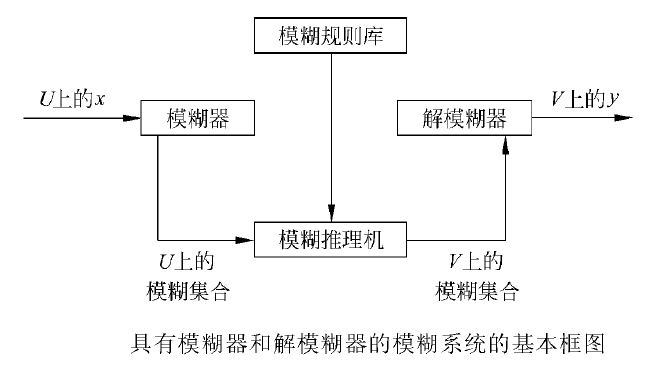
模糊器:将真值变量转换成模糊集合。
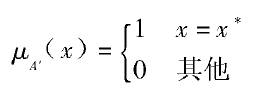
①单值模糊器。单值模糊器将一个实值点x∈U映射成U上的一个模糊单指A',A'在x点上的隶属度值为1,在U中其他点上的隶属度值为0。
②高斯模糊器。高斯模糊器将x∈U映射成U上的模糊集A',它具有如下高斯隶属度函数:

③三角形模糊器。三角形模糊器将x∈U映射成U上的模糊集A',它具有如下三角形隶属度函数:

模糊推理机:根据模糊逻辑原理,通过组合这些模糊IF-THEN规则来决定如何将输入论域U上的模糊集合映射到输出论域V上的模糊集合。
①乘积推理机
使用模糊并组合的独立推理;Mamdani积含义;所有t-范数算子都选用代数积算子,所有s-范数算子都选用最大算子。

给定U上一个模糊集合A',乘积推理机可以由式给出V上的模糊集合B'。
②最小推理机
使用模糊并组合的独立推理;Mamdanin最小含义;所有t-范数算子都选用最小算子,所有s-范数都选用最大算子。

给定U上一个模糊集合A',最小推理机可以由式给出V上的模糊集合B'。
③Lukasiewicz推理机
使用模糊交组合的独立推理;Lukasiewicz含义;所有t-范数算子都选用最小算子。

给定U上一个模糊集合A',Lukasiewicz推理机可以由式给出V上的模糊集合B'。
④Zadeh推理机
使用基于模糊交组合的独立推理;Zadeh含义;所有t-范数算子都选用最小算子。

给定U上一个模糊集合A',Zadeh推理机可以由式给出V上的模糊集合B'。
⑤Dienes-Rescher推理机
使用基于模糊交组合的独立推理;Dienes-Rescher含义;所有t-范数算子都选用最小算子。

给定U上一个模糊集合A',Dienes-Rescher推理机可以由式给出V上的模糊集合B'。
解模糊器:将模糊集合转变成真值变量。
①重心解模糊器。重心解模糊器所以确定的y是B'的隶属度函数所涵盖区域的中心。即:
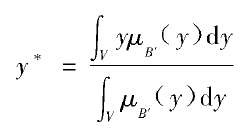
其中,![]() 是常规积分。
是常规积分。
②中心平均解模糊器。由于模糊集B'是M个模糊集的模糊合并成或模糊交合成,所以一个好的逼近就是M个模糊集中心的加权平均,其权重等于相应模糊集的高度。

③最大值解模糊器。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号