强化学习
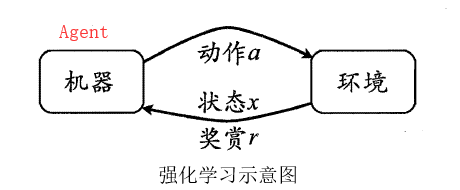
强化学习:是智能体(Agent)以“试错”的方式进行学习,通过与环境进行交互获得的奖赏指导行为,目标是使智能体获得最大的奖赏。(来源百度百科) 强化学习的指导信息很少,而且往往是在事后(最后一个状态)才给出的,这就导致了一个问题,就是获得正回报或者负回报以后,如何将回报分配给前面的状态。
1.K-摇臂赌博机
强化学习的最终奖赏是在多步动作之后才能观察到,先考虑单步奖赏最大化(仅考虑一步操作),分成两步:①确定每个动作对应的奖赏②执行奖赏最大的动作
每个动作对应的奖赏可能是服从某个概率分布,所以对所有的动作遍历一次,无法确切得到每个动作对应的奖赏。
K-摇臂赌博机 ,K-摇臂赌博机有K 个摇臂,赌徒在投入一个硬币后可选择按下其中」个摇臂,每个摇臂以一定的概率吐出硬币?但这个概率赌徒并不知道.赌徒的目标是通过一定的策略最大化自己的
奖赏,即获得最多的硬币.

为了获得每个摇杆的期望奖赏,则可采用"仅探索" 法:将所有的尝试机会平均分配给每个摇臂(即轮流按下每个摇臂),最后以每个摇臂各自的平均吐币橄率作为其奖赏期望的近似估计.
若仅为执行奖赏最大的动作,则可采用"仅利用" 法:按下目前最优的(即到目前为止平均奖赏最大的)摇臂,若有多个摇臂同为最优,则从中随机选取一个.
显然,"仅探索"法能很好地估计每个摇臂的奖赏,却会失去很多选择最优摇臂的机会;"仅利用"法则相反,它没有很好地估计摇臂期望奖赏,很可能经常选不到最优摇臂.因此,这两种方法都难以使最终
的累积奖赏最大化.
为了讲累计奖赏最大化,需要载探索和利用之间找到一个合适的平衡:
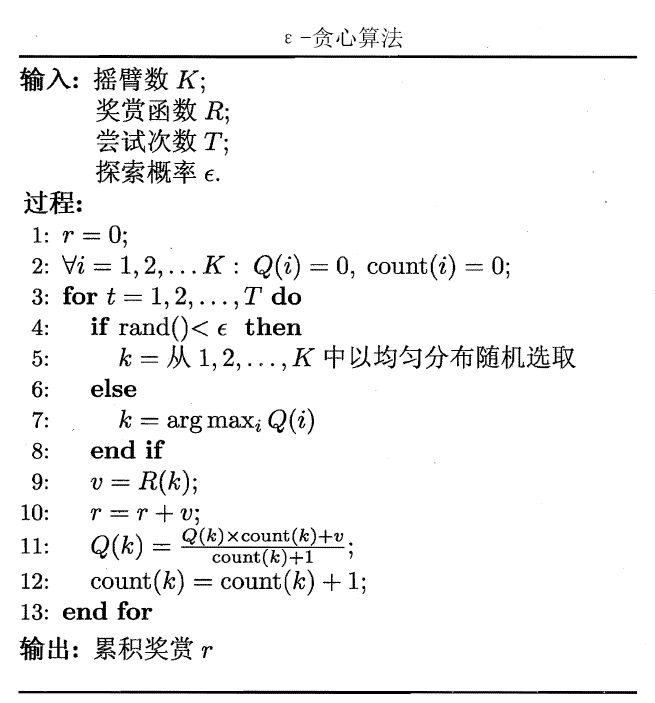
显然第5步中的均匀分布随机选取并不合适,因为摇杆的平均奖赏高对应的选择概率应该高于其他摇杆(类似轮盘赌法)。所以提出
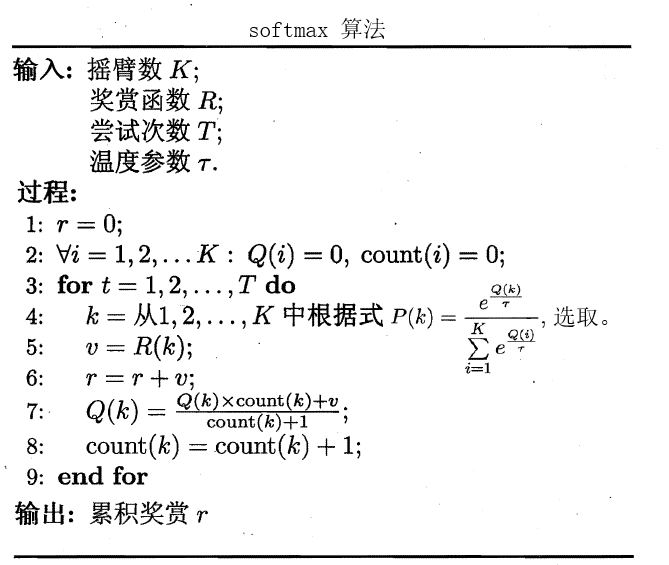
注:![]() >0 称为"温度" ,
>0 称为"温度" , ![]() 越小则平均奖赏高的摇臂被选取的概率越高.
越小则平均奖赏高的摇臂被选取的概率越高.![]() 趋于0 时Softmax 将趋于"仅利用",
趋于0 时Softmax 将趋于"仅利用",![]() 趋于无穷大时Softmax 则将趋于"仅探索"。
趋于无穷大时Softmax 则将趋于"仅探索"。
2 马尔科夫决策过程
一个马尔可夫决策过程由一个四元组构成M = (S, A, Psa, 𝑅)
- S: 表示状态集(states),有s∈S,si表示第i步的状态。
- A: 表示一组动作(actions),有a∈A,ai表示第i步的动作。
- 𝑃sa: 表示状态转移概率。𝑃s𝑎 表示的是在当前s ∈ S状态下,经过a ∈ A作用后,会转移到的其他状态的概率分布情况。比如,在状态s下执行动作a,转移到s'的概率可以表示为p(s'|s,a)。
- R: S×A⟼ℝ ,R是回报函数(reward function)。有些回报函数状态S的函数,可以简化为R: S⟼ℝ。如果一组(s,a)转移到了下个状态s',那么回报函数可记为r(s'|s, a)。如果(s,a)对应的下个状态s'是唯一的,那么回报函数也可以记为r(s,a)。
MDP 的动态过程如下:某个智能体(agent)的初始状态为s0,然后从 A 中挑选一个动作a0执行,执行后,agent 按Psa概率随机转移到了下一个s1状态,s1∈ Ps0a0。然后再执行一个动作a1,就转移到了s2,接下来再执行a2…,我们可以用下面的图表示状态转移的过程。

状态函数Vπ (x,a) 表示从状态x 出发, 使用策略π作所带来的累积奖赏;动作函数Qπ (x,a) 表示从状态x出发,执行动作a后再使用策略π带来的累积奖赏。

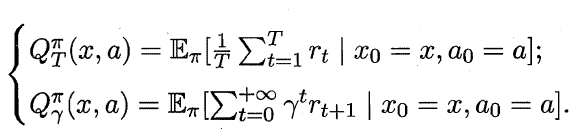
状态值函数和动作值函数展开后可得:


其中:![]() 所以:
所以:
![]() ,
,
策略迭代:

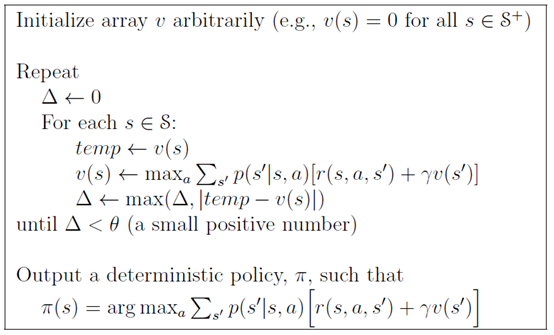
值迭代:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号