

学习B站up主热心市民翔先生的BLDC控制----电流闭环的实现
1.硬件:
采样电阻 + 运放 + 单片机的ADC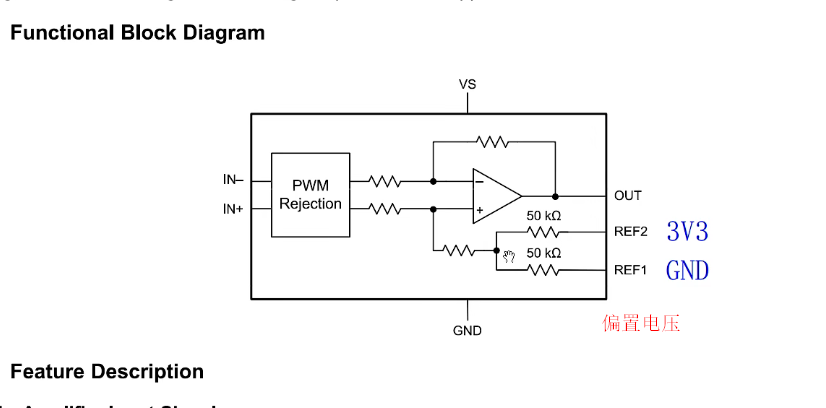
2.软件:
1.freertos多任务结构:
a.电机控制优先级最高,2ms执行一次
b.串口打印任务比控制任务优先级低,10ms执行一次
2.stm32Cube可以方便找到某个外设能对应哪些引脚,但仅限于stm单片机
Cube是驱动开发、软件工程的产品
3.我要了解一下算法在计算机中是如何实现的
数学方面:三角函数以及向量运算、微积分、滤波
控制方面:PID控制器、现实的物理模型的控制原理
硬件方面:逆变电路、电流采样运放
思路:
1.让电机运转起来:
被控对象的机械运动分析:三相定子、永磁转子;
2.电机运转的控制:
物理运动定律,位置速度加速度;
控制系统的原理结构:位置、转速、力矩控制;
PID控制器的程序实现;
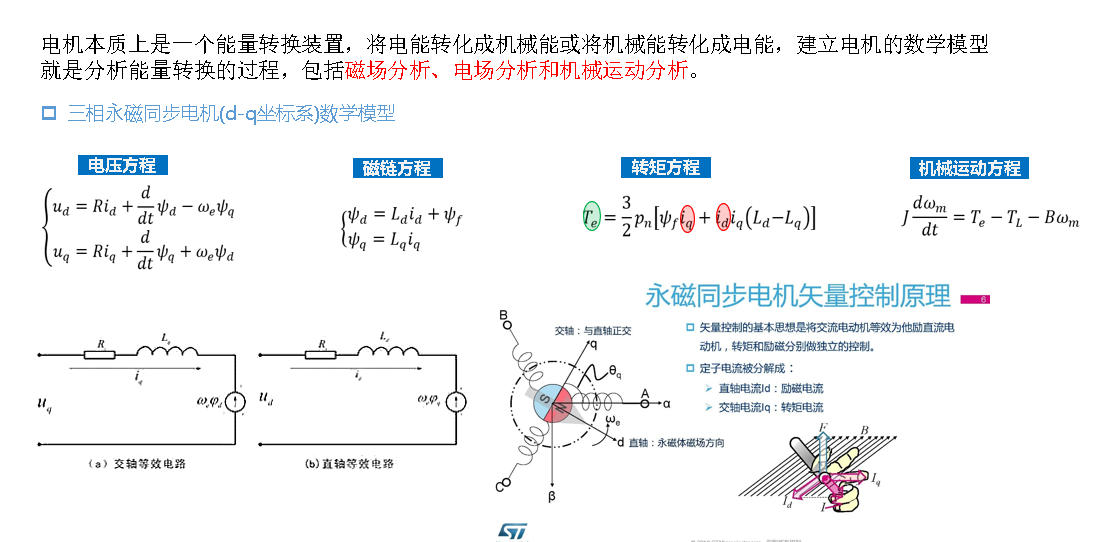
3.把六段磁场变为圆形连续磁场,实现PMSM电机的稳定、准确的力矩控制:FOC;
abc坐标和d-q坐标转换的数学关系;
d-q坐标下,定子电感、磁链、电流、电压,转子磁链、转矩的数学关系;
定子电压和感应电动势(定子磁链的微分)有关系;
SVPWM、开关时间与,U_alpha和U_beta的模、电角度的数学关系;
(实际上转子作为一个整体转动一周的变化范围才是机械角度,每从一个N极到下一个N极变化的范围是电角度的一个周期,
因而转子在转动一周的过程中,电角度的变化范围 = 机械角度 x 极对数);
4.由被控对象的驱动方式得出,所需要的电路类型(逆变、电压转换电路);
电路类型的分立元件以及对应的典型集成芯片的关键参数;
画PCB、焊接元件(缺少工具、经验);
5.细节实现:
从采集角度转换来的的,转速有高频干扰,滤波;;
软件滤波,截止频率与采样周期、当次采样值的数学关系;
(系统惯性对频率响应的影响);
不使用fpu情况下,实现三角函数的近似运算;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号