

学习B站up主热心市民翔先生的BLDC控制----pid控制、转速控制
思路:
1.配置TIM2外设、使用近似的数学函数,增加处理速度(暂时跳过);
2.在TIM2的中断函数中获取机械角度、计算转速并进行转速闭环PI控制
3.转速PID函数中,输入误差速度,输出q轴参考电压(进行了PID控制、输出限幅)
根据转速PID控制器输出的q轴参考电压,和电角度,进行FOC控制
复习:没用FOC前,产生的磁场是6段式的,在段与段之间,转子受到的力矩不恒定,容易影响运动状态。
FOC控制可产生圆形磁场,就是通过数学中的向量计算,弥补段与段之间的磁场变化的空白。
让产生的力矩始终垂直转子,使转子的运动状态不容易被影响。
所以说FOC是针对永磁同步电机的机械结构产生的一种控制方法。
本节也只实现了转速闭环控制。
参考PID代码:
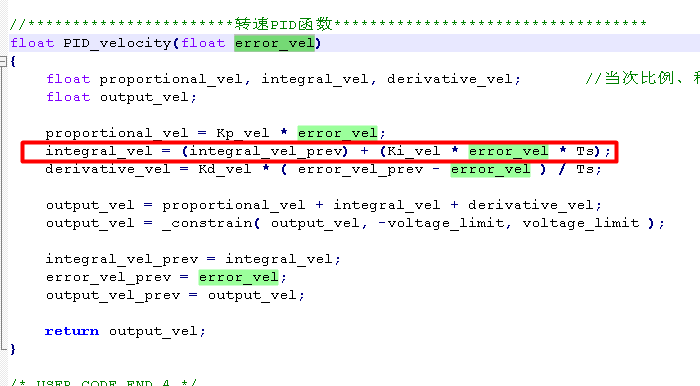
观察后可以发现,假设误差为0时,只剩下积分和微分起作用,本例只有积分起作用。
积分项会保存当前运动状态的控制量。
仔细想想,本系统还是有电流开环的,并不是没有。
因为程序中转速环输出的是q轴电压,而不是abc相电压。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号