
FPGA实现图像的二值形态学滤波:边界提取
轮廓是对物体形状的有力描述,对图像分析和识别十分有用。通过边界提取算法可以得到物体的边界轮廓。
二值图像的边界提取主要基于黑白区域的边界查找,和许多边界查找算法相比它适合于二值图像。
边界提取的算法比较简单,以黑色 0 作为背景,白色 1 作为提取。以 3x3 模板为例,9 个像素都为 0 或 1 时输出为 0,否则为 1 。如图所示:

一、FPGA实现
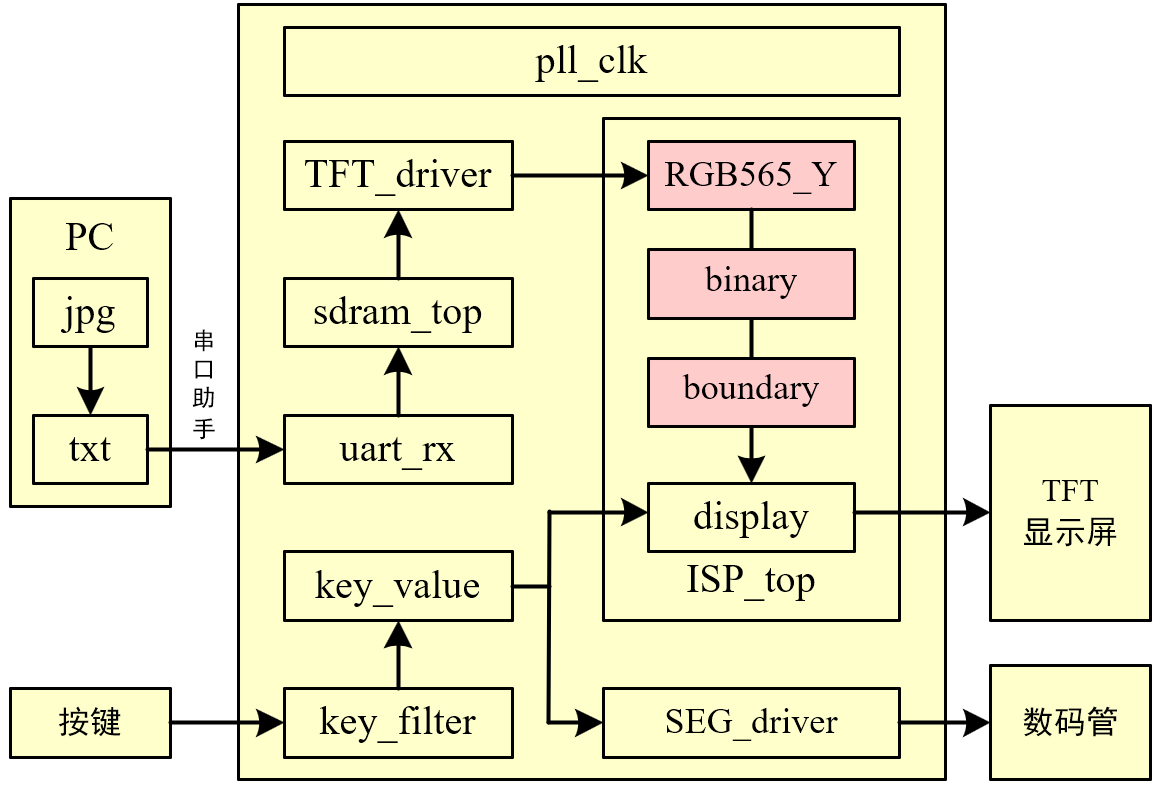
(1)ISP_top
//**************************************************************************
// *** 名称 : ISP_top.v
// *** 作者 : xianyu_FPGA
// *** 博客 : https://www.cnblogs.com/xianyufpga/
// *** 日期 : 2020年3月
// *** 描述 : 图像处理模块的顶层文件
//**************************************************************************
module ISP_top
//========================< 参数 >==========================================
#(
parameter H_DISP = 12'd480 , //图像宽度
parameter V_DISP = 12'd272 //图像高度
)
//========================< 端口 >==========================================
(
input wire clk , //时钟
input wire rst_n , //复位
//RGB -----------------------------------------------
input wire RGB_hsync , //RGB行同步
input wire RGB_vsync , //RGB场同步
input wire [15:0] RGB_data , //RGB数据
input wire RGB_de , //RGB数据使能
//key -----------------------------------------------
input wire [ 1:0] key_vld , //消抖后的按键值
//DISP ----------------------------------------------
output wire DISP_hsync , //最终显示的行同步
output wire DISP_vsync , //最终显示的场同步
output wire [15:0] DISP_data , //最终显示的数据
output wire DISP_de //最终显示的数据使能
);
//========================< 连线 >==========================================
//Y分量 ---------------------------------------------
wire Y_hsync ; //Y分量行同步
wire Y_vsync ; //Y分量场同步
wire [ 7:0] Y_data ; //Y分量数据
wire Y_de ; //Y分量数据使能
//bina ----------------------------------------------
wire bina_hsync ; //bina行同步
wire bina_vsync ; //bina场同步
wire [ 7:0] bina_data ; //bina数据
wire bina_de ; //bina数据使能
//boundary ------------------------------------------
wire boundary_hsync ; //boundary行同步
wire boundary_vsync ; //boundary场同步
wire [ 7:0] boundary_data ; //boundary数据
wire boundary_de ; //boundary数据使能
//==========================================================================
//== RGB565转YCbCr444,再取Y分量作为灰度数据
//==========================================================================
RGB565_Y u_RGB565_Y
(
.clk (clk ), //时钟
.rst_n (rst_n ), //复位
//RGB -------------------------------------------
.RGB_hsync (RGB_hsync ), //RGB行同步
.RGB_vsync (RGB_vsync ), //RGB场同步
.RGB_data (RGB_data ), //RGB数据
.RGB_de (RGB_de ), //RGB数据使能
//Y分量 -----------------------------------------
.Y_hsync (Y_hsync ), //Y分量行同步
.Y_vsync (Y_vsync ), //Y分量场同步
.Y_data (Y_data ), //Y分量数据
.Y_de (Y_de ) //Y分量数据使能
);
//==========================================================================
//== 灰度图转二值图
//==========================================================================
binary u_binary
(
.clk (clk ), //时钟
.rst_n (rst_n ), //复位
//Y分量 -----------------------------------------
.Y_hsync (Y_hsync ), //Y分量行同步
.Y_vsync (Y_vsync ), //Y分量场同步
.Y_data (Y_data ), //Y分量数据
.Y_de (Y_de ), //Y分量数据使能
//阈值 ------------------------------------------
.value (8'd127 ), //阈值
//bina ------------------------------------------
.bina_hsync (bina_hsync ), //bina行同步
.bina_vsync (bina_vsync ), //bina场同步
.bina_data (bina_data ), //bina数据
.bina_de (bina_de ) //bina数据使能
);
//==========================================================================
//== 二值法边缘检测
//==========================================================================
boundary
#(
.H_DISP (H_DISP ), //图像宽度
.V_DISP (V_DISP ) //图像高度
)
u_boundary
(
.clk (clk ), //时钟
.rst_n (rst_n ), //复位
//bina ------------------------------------------
.bina_hsync (bina_hsync ), //bina行同步
.bina_vsync (bina_vsync ), //bina场同步
.bina_data (bina_data ), //bina数据
.bina_de (bina_de ), //bina数据使能
//boundary ----------------------------------------
.boundary_hsync (boundary_hsync ), //boundary行同步
.boundary_vsync (boundary_vsync ), //boundary场同步
.boundary_data (boundary_data ), //boundary数据
.boundary_de (boundary_de ) //boundary数据使能
);
//==========================================================================
//== 按键选择不同图像效果
//==========================================================================
display u_display
(
.clk (clk ), //时钟
.rst_n (rst_n ), //复位
//pre -------------------------------------------
.pre_hsync (bina_hsync ), //pre行同步
.pre_vsync (bina_vsync ), //pre场同步
.pre_data ({bina_data[7:3],bina_data[7:2],bina_data[7:3]}), //pre数据
.pre_de (bina_de ), //pre数据使能
//post ------------------------------------------
.post_hsync (boundary_hsync ), //post行同步
.post_vsync (boundary_vsync ), //post场同步
.post_data ({boundary_data[7:3],boundary_data[7:2],boundary_data[7:3]}), //post数据
.post_de (boundary_de ), //post数据使能
//key -------------------------------------------
.key_vld (key_vld ), //消抖后的按键值
//DISP ------------------------------------------
.DISP_hsync (DISP_hsync ), //最终显示的行同步
.DISP_data (DISP_data ), //最终显示的场同步
.DISP_de (DISP_de ), //最终显示的数据
.DISP_vsync (DISP_vsync ) //最终显示的数据使能
);
endmodule(2)RGB565_Y
//**************************************************************************
// *** 名称 : RGB565_Y.v
// *** 作者 : xianyu_FPGA
// *** 博客 : https://www.cnblogs.com/xianyufpga/
// *** 日期 : 2020年3月
// *** 描述 : RGB565转RGB888再转YCbCr444,再取Y分量作为灰度数据
//--------------------------------------------------------------------------
// Y = 0.299*R + 0.587*G + 0.114*B
// Cb = 0.586*(B-Y) + 128 = -0.172*R - 0.339*G + 0.511*B + 128
// Cr = 0.713*(R-Y) + 128 = 0.511*R - 0.428*G - 0.083*B + 128
// --->
// Y = ( 77*R + 150*G + 29*B) >> 8
// Cb = (-43*R - 85*G + 128*B) >> 8 + 128
// Cr = (128*R - 107*G - 21*B) >> 8 + 128
// --->
// Y = ( 77*R + 150*G + 29*B) >> 8
// Cb = (-43*R - 85*G + 128*B + 32768) >> 8
// Cr = (128*R - 107*G - 21*B + 32768) >> 8
//**************************************************************************
module RGB565_Y
//========================< 端口 >==========================================
(
input wire clk , //时钟
input wire rst_n , //复位
//input ---------------------------------------------
input wire RGB_hsync , //RGB行同步
input wire RGB_vsync , //RGB场同步
input wire [15:0] RGB_data , //RGB数据
input wire RGB_de , //RGB数据使能
//output --------------------------------------------
output wire Y_hsync , //Y分量行同步
output wire Y_vsync , //Y分量场同步
output wire [ 7:0] Y_data , //Y分量数据
output wire Y_de //Y分量数据使能
);
//========================< 信号 >==========================================
wire [ 7:0] R0, G0, B0 ;
reg [15:0] R1, G1, B1 ;
reg [15:0] R2, G2, B2 ;
reg [15:0] R3, G3, B3 ;
reg [15:0] Y1, Cb1, Cr1 ;
reg [ 7:0] Y2, Cb2, Cr2 ;
//---------------------------------------------------
reg [ 2:0] RGB_de_r ;
reg [ 2:0] RGB_hsync_r ;
reg [ 2:0] RGB_vsync_r ;
//==========================================================================
//== RGB565转RGB888
//==========================================================================
assign R0 = {RGB_data[15:11],RGB_data[13:11]};
assign G0 = {RGB_data[10: 5],RGB_data[ 6: 5]};
assign B0 = {RGB_data[ 4: 0],RGB_data[ 2: 0]};
//==========================================================================
//== RGB888转YCbCr
//==========================================================================
//clk 1
//---------------------------------------------------
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
{R1,G1,B1} <= {16'd0, 16'd0, 16'd0};
{R2,G2,B2} <= {16'd0, 16'd0, 16'd0};
{R3,G3,B3} <= {16'd0, 16'd0, 16'd0};
end
else begin
{R1,G1,B1} <= { {R0 * 16'd77}, {G0 * 16'd150}, {B0 * 16'd29 } };
{R2,G2,B2} <= { {R0 * 16'd43}, {G0 * 16'd85}, {B0 * 16'd128} };
{R3,G3,B3} <= { {R0 * 16'd128}, {G0 * 16'd107}, {B0 * 16'd21 } };
end
end
//clk 2
//---------------------------------------------------
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
Y1 <= 16'd0;
Cb1 <= 16'd0;
Cr1 <= 16'd0;
end
else begin
Y1 <= R1 + G1 + B1;
Cb1 <= B2 - R2 - G2 + 16'd32768; //128扩大256倍
Cr1 <= R3 - G3 - B3 + 16'd32768; //128扩大256倍
end
end
//clk 3,除以256即右移8位,即取高8位
//---------------------------------------------------
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
Y2 <= 8'd0;
Cb2 <= 8'd0;
Cr2 <= 8'd0;
end
else begin
Y2 <= Y1[15:8];
Cb2 <= Cb1[15:8];
Cr2 <= Cr1[15:8];
end
end
assign Y_data = Y2; //只取Y分量输出
//==========================================================================
//== 信号同步
//==========================================================================
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
RGB_de_r <= 3'b0;
RGB_hsync_r <= 3'b0;
RGB_vsync_r <= 3'b0;
end
else begin
RGB_de_r <= {RGB_de_r[1:0], RGB_de};
RGB_hsync_r <= {RGB_hsync_r[1:0], RGB_hsync};
RGB_vsync_r <= {RGB_vsync_r[1:0], RGB_vsync};
end
end
assign Y_de = RGB_de_r[2];
assign Y_hsync = RGB_hsync_r[2];
assign Y_vsync = RGB_vsync_r[2];
endmodule(3)binary
//**************************************************************************
// *** 名称 : binary.v
// *** 作者 : xianyu_FPGA
// *** 博客 : https://www.cnblogs.com/xianyufpga/
// *** 日期 : 2020年3月
// *** 描述 : Gray灰度图转二值图
//**************************************************************************
module binary
//========================< 端口 >==========================================
(
input wire clk , //时钟
input wire rst_n , //复位
//原图 ----------------------------------------------
input wire Y_hsync , //Y分量行同步
input wire Y_vsync , //Y分量场同步
input wire [ 7:0] Y_data , //Y分量数据
input wire Y_de , //Y分量数据使能
//value ---------------------------------------------
input wire [ 7:0] value , //阈值
//灰度 ----------------------------------------------
output wire bina_hsync , //二值行同步
output wire bina_vsync , //二值场同步
output wire [ 7:0] bina_data , //二值数据
output wire bina_de //二值数据使能
);
//==========================================================================
//== 代码
//==========================================================================
assign bina_hsync = Y_hsync;
assign bina_vsync = Y_vsync;
assign bina_de = Y_de;
assign bina_data = (Y_data > value) ? 8'hff : 8'h00;
endmodule(4)boundary
//**************************************************************************
// *** 名称 : boundary.v
// *** 作者 : xianyu_FPGA
// *** 博客 : https://www.cnblogs.com/xianyufpga/
// *** 日期 : 2020年3月
// *** 描述 : boundary边缘检测,输入必须是二值化图像
//**************************************************************************
module boundary
//========================< 参数 >==========================================
#(
parameter H_DISP = 12'd480 , //图像宽度
parameter V_DISP = 12'd272 //图像高度
)
//========================< 端口 >==========================================
(
input wire clk , //时钟
input wire rst_n , //复位
//input ---------------------------------------------
input wire bina_hsync , //bina场同步
input wire bina_vsync , //bina数据
input wire [ 7:0] bina_data , //bina数据使能
input wire bina_de , //bina行同步
//output --------------------------------------------
output wire boundary_hsync , //boundary场同步
output wire boundary_vsync , //boundary数据
output reg [ 7:0] boundary_data , //boundary数据使能
output wire boundary_de //boundary行同步
);
//========================< 信号 >==========================================
//matrix_3x3 ----------------------------------------
wire [ 7:0] matrix_11 ;
wire [ 7:0] matrix_12 ;
wire [ 7:0] matrix_13 ;
wire [ 7:0] matrix_21 ;
wire [ 7:0] matrix_22 ;
wire [ 7:0] matrix_23 ;
wire [ 7:0] matrix_31 ;
wire [ 7:0] matrix_32 ;
wire [ 7:0] matrix_33 ;
//同步 ----------------------------------------------
reg [ 1:0] bina_de_r ;
reg [ 1:0] bina_hsync_r ;
reg [ 1:0] bina_vsync_r ;
//==========================================================================
//== matrix_3x3_8bit,生成3x3矩阵,输入和使能需对齐,耗费1clk
//==========================================================================
//--------------------------------------------------- 矩阵顺序
// {matrix_11, matrix_12, matrix_13}
// {matrix_21, matrix_22, matrix_23}
// {matrix_31, matrix_32, matrix_33}
//--------------------------------------------------- 模块例化
matrix_3x3_8bit
#(
.H_DISP (H_DISP ), //图像宽度
.V_DISP (V_DISP ) //图像高度
)
u_matrix_3x3_16bit
(
.clk (clk ),
.rst_n (rst_n ),
.din_vld (bina_de ),
.din (bina_data ),
.matrix_11 (matrix_11 ),
.matrix_12 (matrix_12 ),
.matrix_13 (matrix_13 ),
.matrix_21 (matrix_21 ),
.matrix_22 (matrix_22 ),
.matrix_23 (matrix_23 ),
.matrix_31 (matrix_31 ),
.matrix_32 (matrix_32 ),
.matrix_33 (matrix_33 )
);
//==========================================================================
//== 边缘提取,耗费1clk
//==========================================================================
always @ (posedge clk or negedge rst_n)begin
if(!rst_n)begin
boundary_data <= 8'h0;
end
else if((matrix_11 == 8'h0) && (matrix_12 == 8'h0) && (matrix_13 == 8'h0) &&
(matrix_21 == 8'h0) && (matrix_22 == 8'h0) && (matrix_23 == 8'h0) &&
(matrix_31 == 8'h0) && (matrix_32 == 8'h0) && (matrix_33 == 8'h0))
begin
boundary_data <= 8'hff;
end
else if((matrix_11 == 8'hff) && (matrix_12 == 8'hff) && (matrix_13 == 8'hff) &&
(matrix_21 == 8'hff) && (matrix_22 == 8'hff) && (matrix_23 == 8'hff) &&
(matrix_31 == 8'hff) && (matrix_32 == 8'hff) && (matrix_33 == 8'hff))
begin
boundary_data <= 8'hff;
end
else begin
boundary_data <= 8'h0;
end
end
//==========================================================================
//== 信号同步
//==========================================================================
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
bina_de_r <= 2'b0;
bina_hsync_r <= 2'b0;
bina_vsync_r <= 2'b0;
end
else begin
bina_de_r <= {bina_de_r[0], bina_de};
bina_hsync_r <= {bina_hsync_r[0], bina_hsync};
bina_vsync_r <= {bina_vsync_r[0], bina_vsync};
end
end
assign boundary_de = bina_de_r[1];
assign boundary_hsync = bina_hsync_r[1];
assign boundary_vsync = bina_vsync_r[1];
endmodule//**************************************************************************
// *** 名称 : matrix_3x3_8bit.v
// *** 作者 : xianyu_FPGA
// *** 博客 : https://www.cnblogs.com/xianyufpga/
// *** 日期 : 2020年3月
// *** 描述 : 3x3矩阵,边界采用像素复制,最大支持1024x1024,耗费1clk
//**************************************************************************
module matrix_3x3_8bit
//========================< 参数 >==========================================
#(
parameter H_DISP = 12'd480 , //图像宽度
parameter V_DISP = 12'd272 //图像高度
)
//========================< 端口 >==========================================
(
input wire clk ,
input wire rst_n ,
//input ---------------------------------------------
input wire din_vld ,
input wire [ 7:0] din ,
//output --------------------------------------------
output reg [ 7:0] matrix_11 ,
output reg [ 7:0] matrix_12 ,
output reg [ 7:0] matrix_13 ,
output reg [ 7:0] matrix_21 ,
output reg [ 7:0] matrix_22 ,
output reg [ 7:0] matrix_23 ,
output reg [ 7:0] matrix_31 ,
output reg [ 7:0] matrix_32 ,
output reg [ 7:0] matrix_33
);
//========================< 信号 >==========================================
reg [11:0] cnt_col ;
wire add_cnt_col ;
wire end_cnt_col ;
reg [11:0] cnt_row ;
wire add_cnt_row ;
wire end_cnt_row ;
wire wr_en_1 ;
wire wr_en_2 ;
wire rd_en_1 ;
wire rd_en_2 ;
wire [ 7:0] q_1 ;
wire [ 7:0] q_2 ;
wire [ 7:0] row_1 ;
wire [ 7:0] row_2 ;
wire [ 7:0] row_3 ;
//==========================================================================
//== FIFO例化,show模式,深度为大于两行数据个数
//==========================================================================
fifo_show_2048x8 u1
(
.clock (clk ),
.data (din ),
.wrreq (wr_en_1 ),
.rdreq (rd_en_1 ),
.q (q_1 )
);
fifo_show_2048x8 u2
(
.clock (clk ),
.data (din ),
.wrreq (wr_en_2 ),
.rdreq (rd_en_2 ),
.q (q_2 )
);
//==========================================================================
//== 行列划分
//==========================================================================
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
cnt_col <= 12'd0;
else if(add_cnt_col) begin
if(end_cnt_col)
cnt_col <= 12'd0;
else
cnt_col <= cnt_col + 12'd1;
end
end
assign add_cnt_col = din_vld;
assign end_cnt_col = add_cnt_col && cnt_col== H_DISP-12'd1;
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
cnt_row <= 12'd0;
else if(add_cnt_row) begin
if(end_cnt_row)
cnt_row <= 12'd0;
else
cnt_row <= cnt_row + 12'd1;
end
end
assign add_cnt_row = end_cnt_col;
assign end_cnt_row = add_cnt_row && cnt_row== V_DISP-12'd1;
//==========================================================================
//== fifo 读写信号
//==========================================================================
assign wr_en_1 = (cnt_row < V_DISP - 12'd1) ? din_vld : 1'd0; //不写最后1行
assign rd_en_1 = (cnt_row > 12'd0 ) ? din_vld : 1'd0; //从第1行开始读
assign wr_en_2 = (cnt_row < V_DISP - 12'd2) ? din_vld : 1'd0; //不写最后2行
assign rd_en_2 = (cnt_row > 12'd1 ) ? din_vld : 1'd0; //从第2行开始读
//==========================================================================
//== 形成 3x3 矩阵,边界采用像素复制
//==========================================================================
//矩阵数据选取
//---------------------------------------------------
assign row_1 = q_2;
assign row_2 = q_1;
assign row_3 = din;
//打拍形成矩阵,1clk
//---------------------------------------------------
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
{matrix_11, matrix_12, matrix_13} <= {8'd0, 8'd0, 8'd0};
{matrix_21, matrix_22, matrix_23} <= {8'd0, 8'd0, 8'd0};
{matrix_31, matrix_32, matrix_33} <= {8'd0, 8'd0, 8'd0};
end
//------------------------------------------------------------------------- 第1排矩阵
else if(cnt_row == 12'd0) begin
if(cnt_col == 12'd0) begin //第1个矩阵
{matrix_11, matrix_12, matrix_13} <= {row_3, row_3, row_3};
{matrix_21, matrix_22, matrix_23} <= {row_3, row_3, row_3};
{matrix_31, matrix_32, matrix_33} <= {row_3, row_3, row_3};
end
else begin //剩余矩阵
{matrix_11, matrix_12, matrix_13} <= {matrix_12, matrix_13, row_3};
{matrix_21, matrix_22, matrix_23} <= {matrix_22, matrix_23, row_3};
{matrix_31, matrix_32, matrix_33} <= {matrix_32, matrix_33, row_3};
end
end
//------------------------------------------------------------------------- 第2排矩阵
else if(cnt_row == 12'd1) begin
if(cnt_col == 12'd0) begin //第1个矩阵
{matrix_11, matrix_12, matrix_13} <= {row_2, row_2, row_2};
{matrix_21, matrix_22, matrix_23} <= {row_2, row_2, row_2};
{matrix_31, matrix_32, matrix_33} <= {row_3, row_3, row_3};
end
else begin //剩余矩阵
{matrix_11, matrix_12, matrix_13} <= {matrix_12, matrix_13, row_2};
{matrix_21, matrix_22, matrix_23} <= {matrix_22, matrix_23, row_2};
{matrix_31, matrix_32, matrix_33} <= {matrix_32, matrix_33, row_3};
end
end
//------------------------------------------------------------------------- 剩余矩阵
else begin
if(cnt_col == 12'd0) begin //第1个矩阵
{matrix_11, matrix_12, matrix_13} <= {row_1, row_1, row_1};
{matrix_21, matrix_22, matrix_23} <= {row_2, row_2, row_2};
{matrix_31, matrix_32, matrix_33} <= {row_3, row_3, row_3};
end
else begin //剩余矩阵
{matrix_11, matrix_12, matrix_13} <= {matrix_12, matrix_13, row_1};
{matrix_21, matrix_22, matrix_23} <= {matrix_22, matrix_23, row_2};
{matrix_31, matrix_32, matrix_33} <= {matrix_32, matrix_33, row_3};
end
end
end
endmodule(5)display
//**************************************************************************
// *** 名称 : display.v
// *** 作者 : xianyu_FPGA
// *** 博客 : https://www.cnblogs.com/xianyufpga/
// *** 日期 : 2020年3月
// *** 描述 : 按键切换不同的图像效果
//**************************************************************************
module display
//========================< 端口 >==========================================
(
input wire clk , //时钟
input wire rst_n , //复位
//pre -----------------------------------------------
input wire pre_hsync , //pre行同步
input wire pre_vsync , //pre场同步
input wire [15:0] pre_data , //pre数据
input wire pre_de , //pre数据使能
//post ----------------------------------------------
input wire post_hsync , //post行同步
input wire post_vsync , //post场同步
input wire [15:0] post_data , //post数据
input wire post_de , //post数据使能
//key -----------------------------------------------
input wire [ 1:0] key_vld , //消抖后的按键值
//DISP ----------------------------------------------
output reg DISP_hsync , //最终显示的行同步
output reg DISP_vsync , //最终显示的场同步
output reg [15:0] DISP_data , //最终显示的数据
output reg DISP_de //最终显示的数据使能
);
//========================< 信号 >==========================================
reg mode ; //模式切换
//==========================================================================
//== 按键切换不同显示效果
//==========================================================================
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
mode <= 1'b0;
end
else if(key_vld[0]) begin
mode <= 1'b1;
end
else if(key_vld[1]) begin
mode <= 1'b0;
end
end
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
DISP_hsync <= 0;
DISP_vsync <= 0;
DISP_data <= 0;
DISP_de <= 0;
end
else if(mode==1'b0) begin //pre
DISP_hsync <= pre_hsync;
DISP_vsync <= pre_vsync;
DISP_data <= pre_data;
DISP_de <= pre_de;
end
else if(mode==1'b1) begin //post
DISP_hsync <= post_hsync;
DISP_vsync <= post_vsync;
DISP_data <= post_data;
DISP_de <= post_de;
end
end
endmodule
二、上板验证
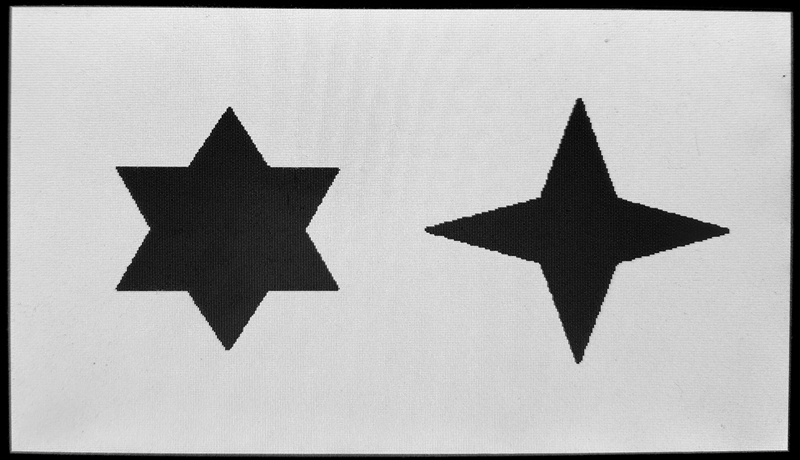
输入找了张二值图片,如果没有二值图片,可以在边界提取前自己写一下阈值判断即可。
二值原图:
边界提取后:
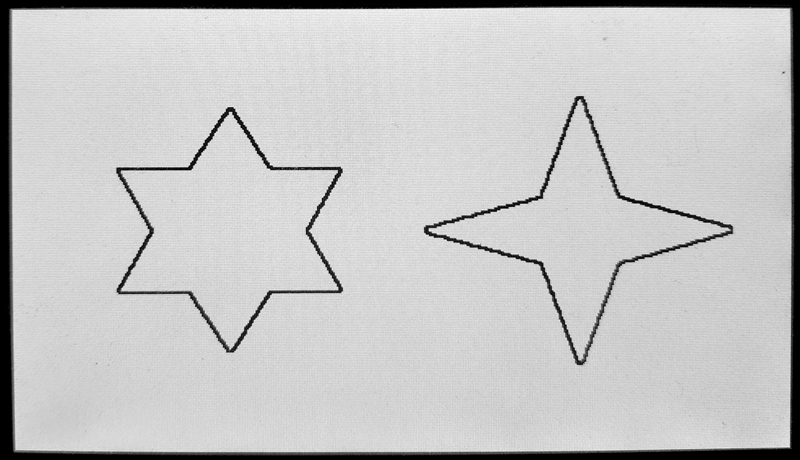
由实验结果可知,边界提取成功,外部的白色和内部的黑色都变为了白色,只有边界处是黑色。
参考资料:[1] Opens Lee:FPGA开源工作室(公众号)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号