
day2021_10_05
今日内容
-
完成概率图模型以及强化学习的重点复习
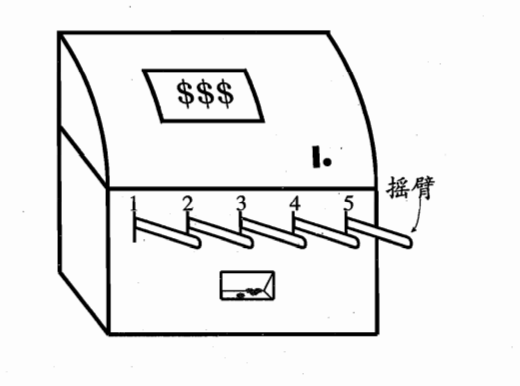
- \(\epsilon\)-贪心:基于一个概率来对探索和利用进行折中:每次尝试时,以\(\epsilon\)的概率进行探索,以均匀概率随机选取一个摇臂,以1-\(\epsilon\)的概率进行利用,即选择当前平均奖赏最高的摇臂
![image]()
比如图上有五个摇臂,有100次摇臂的机会,
当进行第1次摇臂时,此时收益\(Q_0=0\),随机产生一个\([0,1]\)的随机数,如果小于\(\epsilon\),则从1-5号机中以相同概率随机选取一个摇臂开始摇,如果大于\(\epsilon\),则选择第0轮结束后,平均奖赏值最大的摇臂开始摇,显然一开始大家都是0,所以随机选一个。更新\(Q_1=\frac{Q_0*0+v_1}{0+1}\),其中\(v_1\)是选择某个摇臂后得到的奖惩。当我们尝试了12次,
-
其中2次一号机,两次都赢得一块钱,则\(Q(1)=\frac{1+1}{2}=1\)
-
2次二号机,一次1块,一次2块,则\(Q(2)=\frac{1+2}{2}=1.5\)
-
3次三号机,两次1块,一次2块,则\(Q(3)=\frac{1+1+2}{3}=1.33\)
-
2次四号机,一次一块,一次没钱,则\(Q(4)=\frac{1+0}{2}=0.5\)
-
3次五号机,两次一块,一次2块\(Q(5)=\frac{1+1+2}{2}=1.33\)
当进行第13次摇臂时,此时收益为\(Q_{13}\),随机产生一个\([0,1]\)的随机数,如果小于\(\epsilon\),则从1-5号机中以相同概率随机选取一个摇臂开始摇,如果大于\(\epsilon\),则选择第12轮结束后,平均奖赏值最大的摇臂开始摇,也就是二号机,更新\(Q_{13}=\frac{Q_{12}*12+v_13}{12+1}\),其中\(v_{13}\)是选择二号摇臂后得到的奖惩。如此进行到100次结束。
-
显然选择当前平均效率最高的概率为\(1-\epsilon+\frac{\epsilon}{k}\),\(k\)为多少个摇臂。所以,\(\epsilon\)-贪婪意味着大多数时候都选择当前最佳选项(“贪婪”),但有时选择概率很小的随机选项。
-
如果摇臂奖赏的不确定性比较大,就是概率分布比较宽时,则需要更多的探索,此时就需要较大的\(\epsilon\)的值;如果我们进行了多次的摇臂,可以很好的近似真实奖赏时,就可以让\(\epsilon\)的值小一点,进行更多的利用。
-
Q_learning与Sarsa算法的不同点:
-
Q-learning 在学习的时候,用的是贪婪的方法,所以学的一定是最大的。但是在选择的时候因为\(\epsilon\)而存在随机性,下一个更新的不一定是最大回报对应的行为n。但每次更新的回报一定是贪婪的,也就是最大Q的。
Sarsa 在learn之前用\(\epsilon\)-贪婪选择了行为,并且确定用这个行为进行学习。所以学习的不一定是最大回报的。但学的跟做的是一样的。
-
所遇困难
- Q-leanring方法的执行策略有点头疼,到底是更新一步Q表后就执行到新的状态,还是尝试走完所有步后,更新Q表,再跟着Q表走,而且这时候还是\(\epsilon\)-贪婪策略走还是,直接贪婪策略走下一步。
明日计划
- 看下工程训练的需求文档能不能写一点。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号