

SPI
一,定义
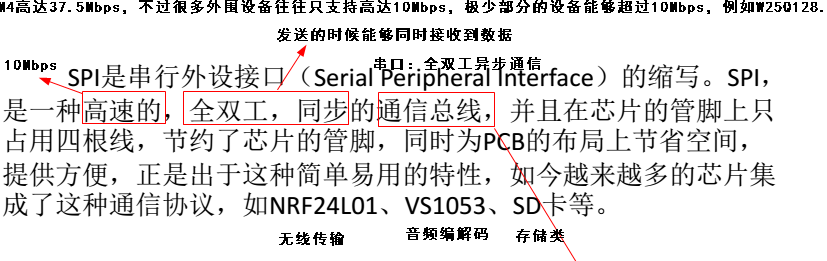
数据传输速度总体来说比I2C总线要快,速度可达到几Mbps。
缺点:没有指定的流控制,没有应答机制确认是否接收到数据。
二,单机与多机通信
1,单机通信

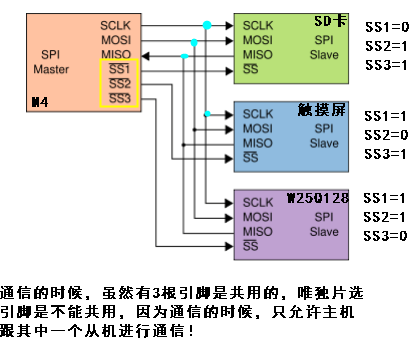
2,多机通信
三,通信细节与过程
在点对点的通信中, SPI接口不需要进行寻址操作,且为全双工通信,显得简单高效。在多个从器件的系统中,每个从器件需要独立的使能信号,
硬件上比I2C系统要稍微复杂一些。
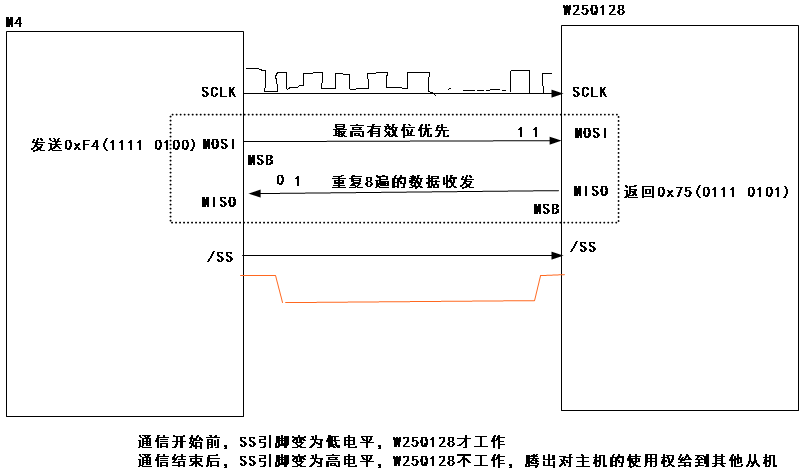
SPI接口在内部硬件实际上是两个简单的移位寄存器,传输的数据为8位,在主器件产生的从器件使能信号和移位脉冲下,按位传输,高位在前,低位在后。
如下图所示,在SCLK的上升沿上数据改变,同时一位数据被存入移位寄存器。

半双工通信追求的是距离,RS485 传输的距离可达1公里多
时序图

W25Q128_读ID

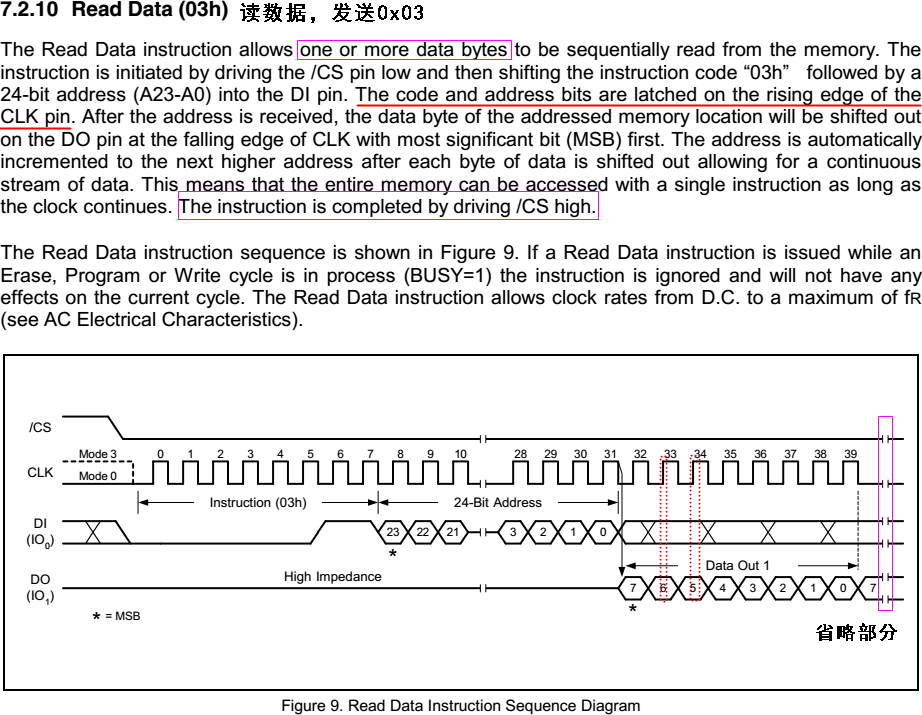
W25Q128_读数据.
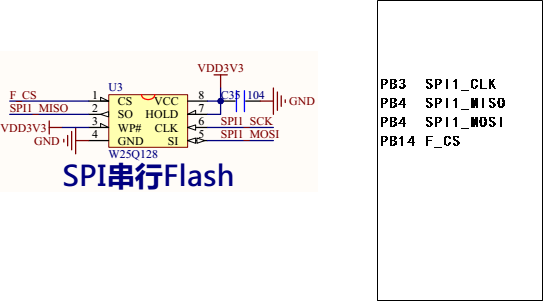
四,硬件原理图
五,工作模式
SPI有四种工作模式,各个工作模式的不同在于SCLK不同, 具体工作由CPOL,CPHA决定:
CPOL: (Clock Polarity),时钟极性
当CPOL为0时,时钟空闲时电平为低;
当CPOL为1时,时钟空闲时电平为高;
CPHA:(Clock Phase),时钟相位
当CPHA为0时,时钟周期的前一边缘采集数据,时钟周期的后一边缘输出数据;
当CPHA为1时,时钟周期的后一边缘采集数据,时钟周期的前一边缘输出数据;
CPOL和CPHA,分别都可以是0或时1,对应的四种组合就是:



#include <stdio.h> #include "stm32f4xx.h" #include "sys.h" #include "string.h" static GPIO_InitTypeDef GPIO_InitStructure; static NVIC_InitTypeDef NVIC_InitStructure; static USART_InitTypeDef USART_InitStructure; static SPI_InitTypeDef SPI_InitStructure; #define W25QXX_SS PBout(14) //重定义fputc函数 int fputc(int ch, FILE *f) { USART_SendData(USART1,ch); while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); return ch; } void delay_us(uint32_t nus) { uint32_t temp; SysTick->LOAD =SystemCoreClock/8/1000000*nus; //时间加载 SysTick->VAL =0x00; //清空计数器 SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //使能滴答定时器开始倒数 do { temp=SysTick->CTRL; }while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达 SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器 SysTick->VAL =0X00; //清空计数器 } void delay_ms(uint16_t nms) { uint32_t temp; SysTick->LOAD=SystemCoreClock/8/1000*nms; //时间加载(SysTick->LOAD为24bit) SysTick->VAL =0x00; //清空计数器 SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //能滴答定时器开始倒数 do { temp=SysTick->CTRL; }while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达 SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器 SysTick->VAL =0X00; //清空计数器 } void USART1_Init(uint32_t baud) { RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //使能USART1时钟 //串口1对应引脚复用映射 GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1 GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1 //USART1端口配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉 GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10 //USART1 初始化设置 USART_InitStructure.USART_BaudRate = baud; //波特率设置 USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口 USART_Cmd(USART1, ENABLE); //使能串口1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启相关中断 //Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //串口1中断通道 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; //抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 } void w25qxx_init(void) { /*!< Enable the SPI clock ,使能SPI1硬件时钟*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE); /*!< Enable GPIO clocks ,使能GPIOB的硬件时钟*/ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE); /*!< SPI pins configuration *************************************************/ /*!< Connect SPI pins to AF5 */ GPIO_PinAFConfig(GPIOB, GPIO_PinSource3, GPIO_AF_SPI1); GPIO_PinAFConfig(GPIOB, GPIO_PinSource4, GPIO_AF_SPI1); GPIO_PinAFConfig(GPIOB, GPIO_PinSource5, GPIO_AF_SPI1); GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; /*!< SPI SCK pin configuration */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; GPIO_Init(GPIOB, &GPIO_InitStructure); /*!< SPI MOSI pin configuration */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; GPIO_Init(GPIOB, &GPIO_InitStructure); /*!< SPI MISO pin configuration */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; GPIO_Init(GPIOB, &GPIO_InitStructure); /*!< Configure sFLASH Card CS pin in output pushpull mode ,配置片选引脚PB14为输出模式*/ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; GPIO_Init(GPIOB, &GPIO_InitStructure); //由于M4芯片还没有真正配置好,先不让外部从机工作 W25QXX_SS=1; /*!< SPI configuration ,SPI的配置*/ SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI为全双工双线双向通信 SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //配置M4为主机角色 SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //SPI的发送和接收都是8bit SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行时钟线(SCLK)空闲的时候是高电平还是低电平,该电平的设置是跟外围设备密切关系的。 SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行时钟的第二跳变沿进行数据采样 SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //片选引脚是由软件控制 SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16; //SPI通信时钟=84MHz/16=5.25MHz SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //最高有效位优先,根据外围设备的通信进行设定 SPI_Init(SPI1, &SPI_InitStructure); /*!< Enable the sFLASH_SPI ,使能SPI1*/ SPI_Cmd(SPI1, ENABLE); } uint8_t SPI1_SendByte(uint8_t byte) { /*!< Loop while DR register in not emplty ,等待发送缓冲区为空*/ while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET); /*!< Send byte through the SPI1 peripheral,通过SPI1发送字节 */ SPI_I2S_SendData(SPI1, byte); /*!< Wait to receive a byte ,等待接收字节*/ while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET); /*!< Return the byte read from the SPI bus,成功接收从机的字节并返回 */ return SPI_I2S_ReceiveData(SPI1); } uint16_t w25qxx_read_id(void) { uint16_t id=0; //片选引脚拉低 W25QXX_SS=0; //发送0x90 SPI1_SendByte(0x90); //发送24bit地址,全都是0 SPI1_SendByte(0x00); SPI1_SendByte(0x00); SPI1_SendByte(0x00); //读取厂商ID,传递任意的参数 id=SPI1_SendByte(0xFF)<<8; //读取设备ID,传递任意的参数 id|=SPI1_SendByte(0xFF); //片选引脚拉高 W25QXX_SS=1; return id; } void w25qxx_read_data(uint32_t addr,uint8_t *pbuf,uint32_t len) { //片选引脚拉低 W25QXX_SS=0; //发送0x03 SPI1_SendByte(0x03); //发送24bit地址 SPI1_SendByte((addr>>16)&0xFF); SPI1_SendByte((addr>>8)&0xFF); SPI1_SendByte( addr&0xFF); //读取数据 while(len--) *pbuf++ = SPI1_SendByte(0xFF); //片选引脚拉高 W25QXX_SS=1; } //解除写保护 void w25qxx_write_enable(void) { //片选引脚拉低 W25QXX_SS=0; //发送0x06 SPI1_SendByte(0x06); //片选引脚拉高 W25QXX_SS=1; } //写保护 void w25qxx_write_disable(void) { //片选引脚拉低 W25QXX_SS=0; //发送0x04 SPI1_SendByte(0x04); //片选引脚拉高 W25QXX_SS=1; } uint8_t w25qxx_read_status1(void) { uint8_t status; //片选引脚拉低 W25QXX_SS=0; //发送0x05 SPI1_SendByte(0x05); //读取状态寄存器1的值 status = SPI1_SendByte(0xFF); //片选引脚拉高 W25QXX_SS=1; return status; } void w25qxx_erase_sector(uint32_t addr) { uint8_t sta=0; //解除写保护 w25qxx_write_enable(); //延时1ms,让W25Q128识别到CS引脚的变化 delay_ms(1); //片选引脚拉低 W25QXX_SS=0; //发送0x20 SPI1_SendByte(0x20); //发送24bit地址 SPI1_SendByte((addr>>16)&0xFF); SPI1_SendByte((addr>>8)&0xFF); SPI1_SendByte( addr&0xFF); //片选引脚拉高 W25QXX_SS=1; //去判断当前是否已经擦除成功 while(1) { sta = w25qxx_read_status1(); if((sta & 0x01)==0) break; delay_ms(1); } //开启写保护 w25qxx_write_disable(); } void w25qxx_write_data(uint32_t addr,uint8_t *pbuf,uint32_t len) { uint8_t sta=0; //解除写保护 w25qxx_write_enable(); //延时1ms,让W25Q128识别到CS引脚的变化 delay_ms(1); //片选引脚拉低 W25QXX_SS=0; //发送0x02 SPI1_SendByte(0x02); //发送24bit地址 SPI1_SendByte((addr>>16)&0xFF); SPI1_SendByte((addr>>8)&0xFF); SPI1_SendByte( addr&0xFF); //发送数据 while(len--) SPI1_SendByte(*pbuf++); //片选引脚拉高 W25QXX_SS=1; //去判断当前是否已经写入成功 while(1) { sta = w25qxx_read_status1(); if((sta & 0x01)==0) break; delay_ms(1); } //开启写保护 w25qxx_write_disable(); } int main(void) { uint16_t w25qxx_id=0; uint8_t buf_wr[64]={0}; uint8_t buf_rd[64]={0}; uint32_t i=0; //系统定时器初始化,时钟源来自HCLK,且进行8分频, //系统定时器时钟频率=168MHz/8=21MHz SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //设置中断优先级分组2 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //串口1,波特率115200bps,开启接收中断 USART1_Init(115200); //w25qxx初始化 w25qxx_init(); printf("This is spi flash test\r\n"); w25qxx_id=w25qxx_read_id(); printf("w25qxx id=%X\r\n",w25qxx_id); //进行扇区擦除 printf("w25qxx erase from 0\r\n"); w25qxx_erase_sector(0); //写入数据 printf("w25qxx write at 0,data all is 1\r\n"); memset(buf_wr,'1',sizeof buf_wr); w25qxx_write_data(0,buf_wr,64); //读取数据 printf("w25qxx read at 0\r\n"); memset(buf_rd,0,sizeof buf_rd); w25qxx_read_data(0,buf_rd,64); for(i=0; i<64; i++) { printf("%c ",buf_rd[i]); } while(1) { } }
#ifndef __SYS_H__ #define __SYS_H__ //位带操作,实现51类似的GPIO控制功能 //IO口操作宏定义 #define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2)) #define MEM_ADDR(addr) *((volatile unsigned long *)(addr)) #define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum)) //IO口地址映射 #define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014 #define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414 #define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814 #define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14 #define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014 #define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414 #define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814 #define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14 #define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014 #define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010 #define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410 #define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810 #define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10 #define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010 #define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410 #define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810 #define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10 #define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010 //IO口操作,只对单一的IO口! //确保n的值小于16! #define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出 #define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入 #define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出 #define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入 #define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出 #define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入 #define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出 #define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入 #define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出 #define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入 #define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出 #define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入 #define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出 #define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入 #define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出 #define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入 #define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出 #define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入 #endif
#include <stdio.h> #include "stm32f4xx.h" #include "sys.h" #include "string.h" static GPIO_InitTypeDef GPIO_InitStructure; static NVIC_InitTypeDef NVIC_InitStructure; static USART_InitTypeDef USART_InitStructure; static SPI_InitTypeDef SPI_InitStructure; #define W25QXX_SS PBout(14) #define W25QXX_SCLK PBout(3) #define W25QXX_MOSI PBout(5) #define W25QXX_MISO PBin(4) //重定义fputc函数 int fputc(int ch, FILE *f) { USART_SendData(USART1,ch); while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); return ch; } void delay_us(uint32_t nus) { uint32_t temp; SysTick->LOAD =SystemCoreClock/8/1000000*nus; //时间加载 SysTick->VAL =0x00; //清空计数器 SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //使能滴答定时器开始倒数 do { temp=SysTick->CTRL; }while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达 SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器 SysTick->VAL =0X00; //清空计数器 } void delay_ms(uint16_t nms) { uint32_t temp; SysTick->LOAD=SystemCoreClock/8/1000*nms; //时间加载(SysTick->LOAD为24bit) SysTick->VAL =0x00; //清空计数器 SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //能滴答定时器开始倒数 do { temp=SysTick->CTRL; }while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达 SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器 SysTick->VAL =0X00; //清空计数器 } void USART1_Init(uint32_t baud) { RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //使能USART1时钟 //串口1对应引脚复用映射 GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1 GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1 //USART1端口配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉 GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10 //USART1 初始化设置 USART_InitStructure.USART_BaudRate = baud; //波特率设置 USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口 USART_Cmd(USART1, ENABLE); //使能串口1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启相关中断 //Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //串口1中断通道 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; //抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 } void w25qxx_init(void) { /*!< Enable GPIO clocks ,使能GPIOB的硬件时钟*/ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE); /* 配置片选引脚PB3 PB5 PB14为输出模式*/ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_5|GPIO_Pin_14; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; GPIO_Init(GPIOB, &GPIO_InitStructure); /* 配置片选引脚PB4为输入模式*/ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; GPIO_Init(GPIOB, &GPIO_InitStructure); //由于M4芯片还没有真正配置好,先不让外部从机工作 W25QXX_SS=1; } uint8_t SPI1_SendByte(uint8_t byte) { uint32_t i=0; uint8_t d=0; for(i=0; i<8; i++) { //MSB,最高有效位发送数据 if(byte & (1<<(7-i))) W25QXX_MOSI =1; else W25QXX_MOSI =0; //设置SCLK引脚为低电平 W25QXX_SCLK=0; delay_us(2); //由于是同步事件 if(W25QXX_MISO) d|=1<<(7-i); //设置SCLK引脚为高电平 W25QXX_SCLK=1; delay_us(2); } return d; } uint16_t w25qxx_read_id(void) { uint16_t id=0; //片选引脚拉低 W25QXX_SS=0; //发送0x90 SPI1_SendByte(0x90); //发送24bit地址,全都是0 SPI1_SendByte(0x00); SPI1_SendByte(0x00); SPI1_SendByte(0x00); //读取厂商ID,传递任意的参数 id=SPI1_SendByte(0xFF)<<8; //读取设备ID,传递任意的参数 id|=SPI1_SendByte(0xFF); //片选引脚拉高 W25QXX_SS=1; return id; } void w25qxx_read_data(uint32_t addr,uint8_t *pbuf,uint32_t len) { //片选引脚拉低 W25QXX_SS=0; //发送0x03 SPI1_SendByte(0x03); //发送24bit地址 SPI1_SendByte((addr>>16)&0xFF); SPI1_SendByte((addr>>8)&0xFF); SPI1_SendByte( addr&0xFF); //读取数据 while(len--) *pbuf++ = SPI1_SendByte(0xFF); //片选引脚拉高 W25QXX_SS=1; } //解除写保护 void w25qxx_write_enable(void) { //片选引脚拉低 W25QXX_SS=0; //发送0x06 SPI1_SendByte(0x06); //片选引脚拉高 W25QXX_SS=1; } //写保护 void w25qxx_write_disable(void) { //片选引脚拉低 W25QXX_SS=0; //发送0x04 SPI1_SendByte(0x04); //片选引脚拉高 W25QXX_SS=1; } uint8_t w25qxx_read_status1(void) { uint8_t status; //片选引脚拉低 W25QXX_SS=0; //发送0x05 SPI1_SendByte(0x05); //读取状态寄存器1的值 status = SPI1_SendByte(0xFF); //片选引脚拉高 W25QXX_SS=1; return status; } void w25qxx_erase_sector(uint32_t addr) { uint8_t sta=0; //解除写保护 w25qxx_write_enable(); //延时1ms,让W25Q128识别到CS引脚的变化 delay_ms(1); //片选引脚拉低 W25QXX_SS=0; //发送0x20 SPI1_SendByte(0x20); //发送24bit地址 SPI1_SendByte((addr>>16)&0xFF); SPI1_SendByte((addr>>8)&0xFF); SPI1_SendByte( addr&0xFF); //片选引脚拉高 W25QXX_SS=1; //去判断当前是否已经擦除成功 while(1) { sta = w25qxx_read_status1(); if((sta & 0x01)==0) break; delay_ms(1); } //开启写保护 w25qxx_write_disable(); } void w25qxx_write_data(uint32_t addr,uint8_t *pbuf,uint32_t len) { uint8_t sta=0; //解除写保护 w25qxx_write_enable(); //延时1ms,让W25Q128识别到CS引脚的变化 delay_ms(1); //片选引脚拉低 W25QXX_SS=0; //发送0x02 SPI1_SendByte(0x02); //发送24bit地址 SPI1_SendByte((addr>>16)&0xFF); SPI1_SendByte((addr>>8)&0xFF); SPI1_SendByte( addr&0xFF); //发送数据 while(len--) SPI1_SendByte(*pbuf++); //片选引脚拉高 W25QXX_SS=1; //去判断当前是否已经写入成功 while(1) { sta = w25qxx_read_status1(); if((sta & 0x01)==0) break; delay_ms(1); } //开启写保护 w25qxx_write_disable(); } int main(void) { uint16_t w25qxx_id=0; uint8_t buf_wr[64]={0}; uint8_t buf_rd[64]={0}; uint32_t i=0; //系统定时器初始化,时钟源来自HCLK,且进行8分频, //系统定时器时钟频率=168MHz/8=21MHz SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //设置中断优先级分组2 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //串口1,波特率115200bps,开启接收中断 USART1_Init(115200); //w25qxx初始化 w25qxx_init(); printf("This is spi flash test\r\n"); w25qxx_id=w25qxx_read_id(); printf("w25qxx id=%X\r\n",w25qxx_id); //进行扇区擦除 printf("w25qxx erase from 0\r\n"); w25qxx_erase_sector(0); //写入数据 printf("w25qxx write at 0,data all is 1\r\n"); memset(buf_wr,'1',sizeof buf_wr); w25qxx_write_data(0,buf_wr,64); //读取数据 printf("w25qxx read at 0\r\n"); memset(buf_rd,0,sizeof buf_rd); w25qxx_read_data(0,buf_rd,64); for(i=0; i<64; i++) { printf("%c ",buf_rd[i]); } while(1) { } }
练习:
通过ubuntu编写一个串口程序,通过该程序下载该文件到M4的SPI FLASH,实现移动小U盘,详细要求如下:
1)终端输入“down 文件名”,下载过程当中要显示当前的进度
2)终端输入“up 文件名”,上传过程当中要显示当前的进度
实现RFID代码的移植,实现卡的读写!
思考题1:读取数据一次性最多能够读取多少个字节?
思考题2:在进行读取数据的时候,SPI1_SendByte函数的参数能不能任意值?

 浙公网安备 33010602011771号
浙公网安备 33010602011771号