ubuntu20.04镜像方法安装Autoware.ai
———————————————————— 前置条件 ————————————————————
一 已安装nvidia驱动;
二 已安装cuda toolkit;
三 已安装python3.8及以上(anaconda/miniconda安装);
————————————————————— 正文 —————————————————————
【提示】按照Autoware.ai的github主页提示安装:
https://github.com/autowarefoundation/autoware_ai_documentation/wiki/Generic-x86-Docker
- 安装docker:
参考网站:
https://github.com/autowarefoundation/autoware_ai_documentation/wiki/docker-installation
安装docker,检查docker的版本:
docker --version
#Docker version 20.10.17, build 100c701
如果docker的版本不低于19.03,则nvidia-container-toolkit是内蕴的,否则需要手动安装支持nvidia-docker。
安装方法参考 nvidia-docker安装方法:https://github.com/NVIDIA/nvidia-docker/wiki/Installation-(version-2.0) 。
- 配置docker的用户组,避免使用sudo来操作
参考网站:doccker非root权限用户操作方法:https://www.php.cn/docker/493246.html
3.为docker安装nvidia-container-toolkit
为了在docker中使用nvidia的显卡gpu作计算加速(cuda),需要使用--gpus=all启动容器,而这需要nvidia-docker2的支持,安装如下
sudo apt install nvidia-docker2
然后一定要重启docker才能生效,参考网站:
https://blog.csdn.net/zaf0516/article/details/122617623:
sudo apt-get install -y nvidia-docker2
sudo systemctl daemon-reload
sudo systemctl restart docker
- 下载autoware.ai:
需要首先安装git:
sudo apt install git
然后从github拉取autoware.ai的代码和相关安装文件:
git clone https://github.com/autowarefoundation/autoware_ai_docker.git
cd autoware_ai_docker/generic
进入目录后,对于amd64平台,generic是适用的。直接运行run.sh即可。
- 等docker镜像下载完成,run.sh脚本会自动创建container并进入之,此时我们就在容器内部了:
我们可以开启另一个终端看看容器的信息和镜像的信息:
sudo docker ps -a
sudo docker images -a
输出类似如下:
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
16c8fddd3dcd autoware/autoware:latest-melodic-cuda "/tmp/entrypoint.sh" 5 minutes ago Up 5 minutes sleepy_poitras
EPOSITORY TAG IMAGE ID CREATED SIZE
autoware/autoware latest-melodic-cuda 0ab8c4f55a24 2 years ago 10.1GB
检查下开启的容器中是否启用了gpu:
首先在宿主机上执行以下命令:
ls /dev/ | grep 'nvidia'
输出类似如下:
nvidia0
nvidia-caps
nvidiactl
nvidia-modeset
nvidia-uvm
nvidia-uvm-tools
然后在容器内部采用同样的命令查看,输出类似如下:
nvidia-caps
nvidia-modeset
nvidia-uvm
nvidia-uvm-tools
nvidia0
nvidiactl
自此,状态正常。
- 下载自动驾驶的demo数据,并启动autoware.ai,使用rosbag播放这些录制的数据查看算法的运行效果。
参考网址:https://github.com/autowarefoundation/autoware_ai_documentation/tree/master/autoware_quickstart_examples 。
下载3D点云地图:
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_data.tar.gz
与下载录制的ROSBAG全部数据包括LIDAR和GNSS。
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_150324.tar.gz
没有摄像头数据LOL
-- 在~目录下新建.autoware目录:
cd ~
mkdir .autoware
然后将下载好的文件复制或剪切到这里(cp是复制,mv是剪切)。
接着解压文件到.autoware目录下生成data文件夹(静态地图)和rosbag包(动态数据)。
tar zxfv sample_moriyama_150324.tar.gz
tar zxfv sample_moriyama_data.tar.gz
最后利用这些数据跑起来:
cd ~/Autoware
roslaunch runtime_manager runtime_manager.launch
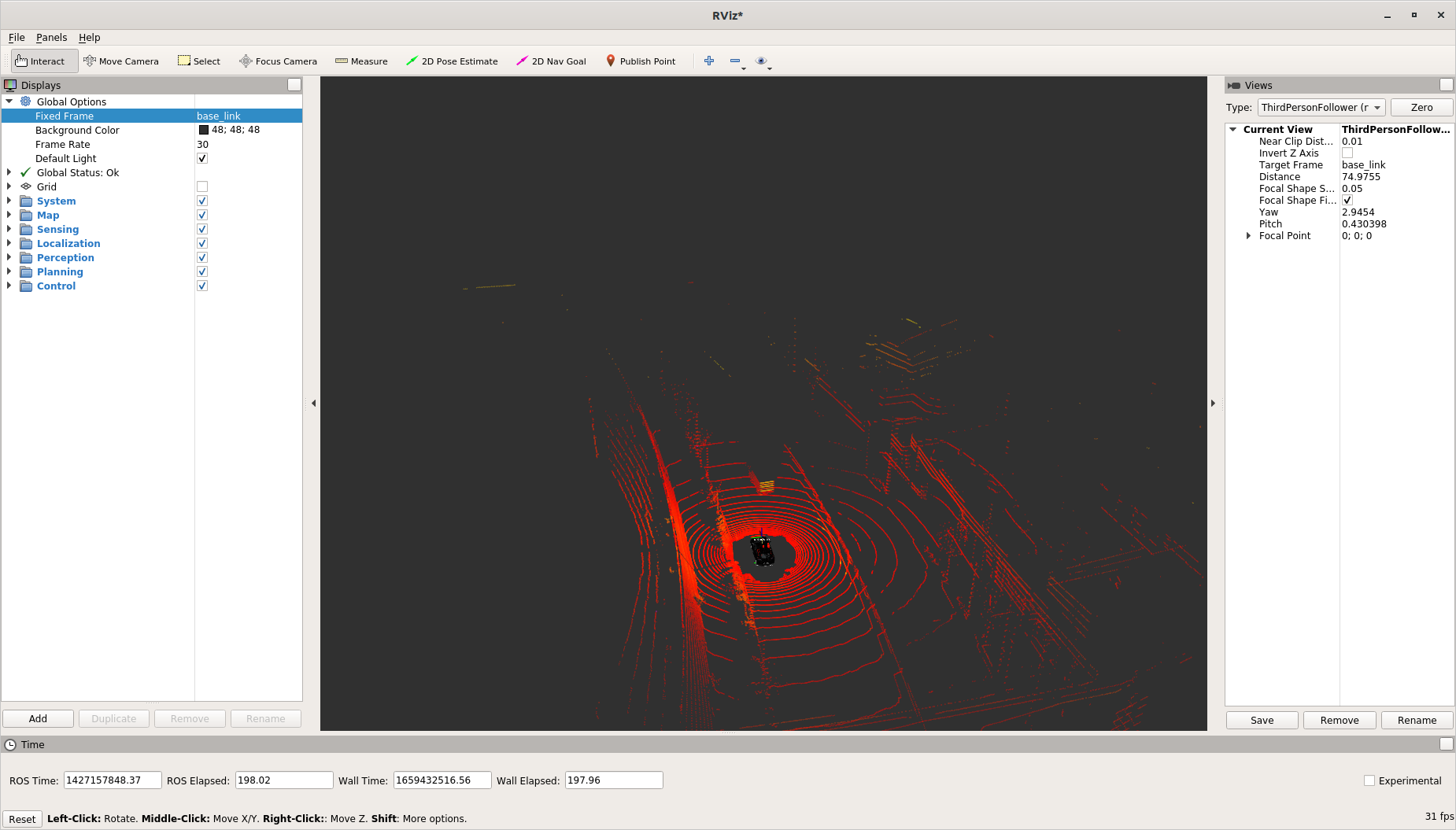
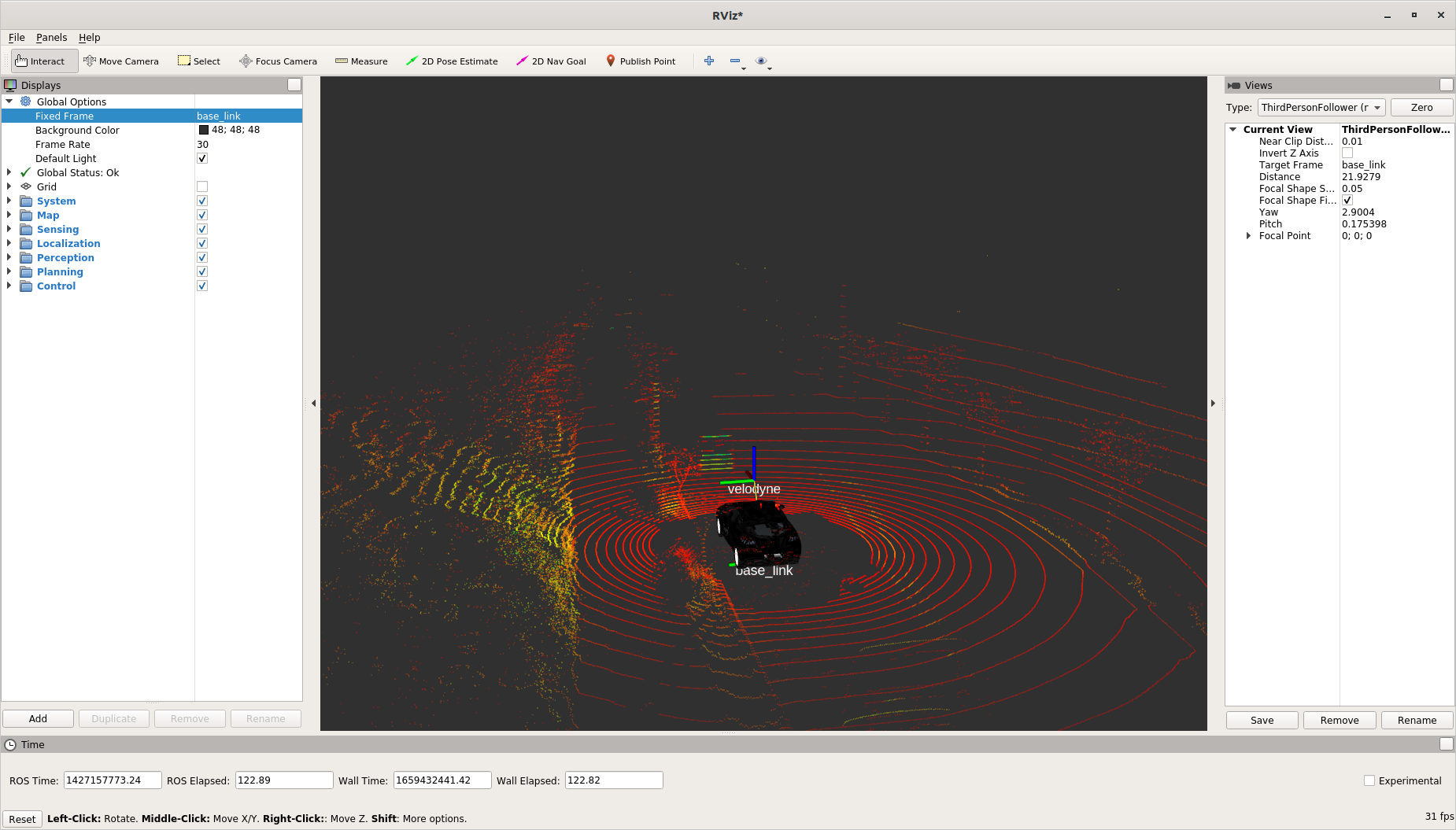
最终,跑起来的效果图如下,注意需要反复尝试simulation加载rosbag,因为很多时候会加载失败导致rviz无法正常显示。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号