
KUKA机器人KUKA.ConveyorTech传送带跟踪工具举例解析
引言
- 本文通过对实际应用中的基于KUKA机器人传送带跟踪特性,对跟踪取件过程中的两个重要程序PICKCONV1和CONVEYOR 1 MOVEMENT GROUP 1的解释
PICKCONV1程序
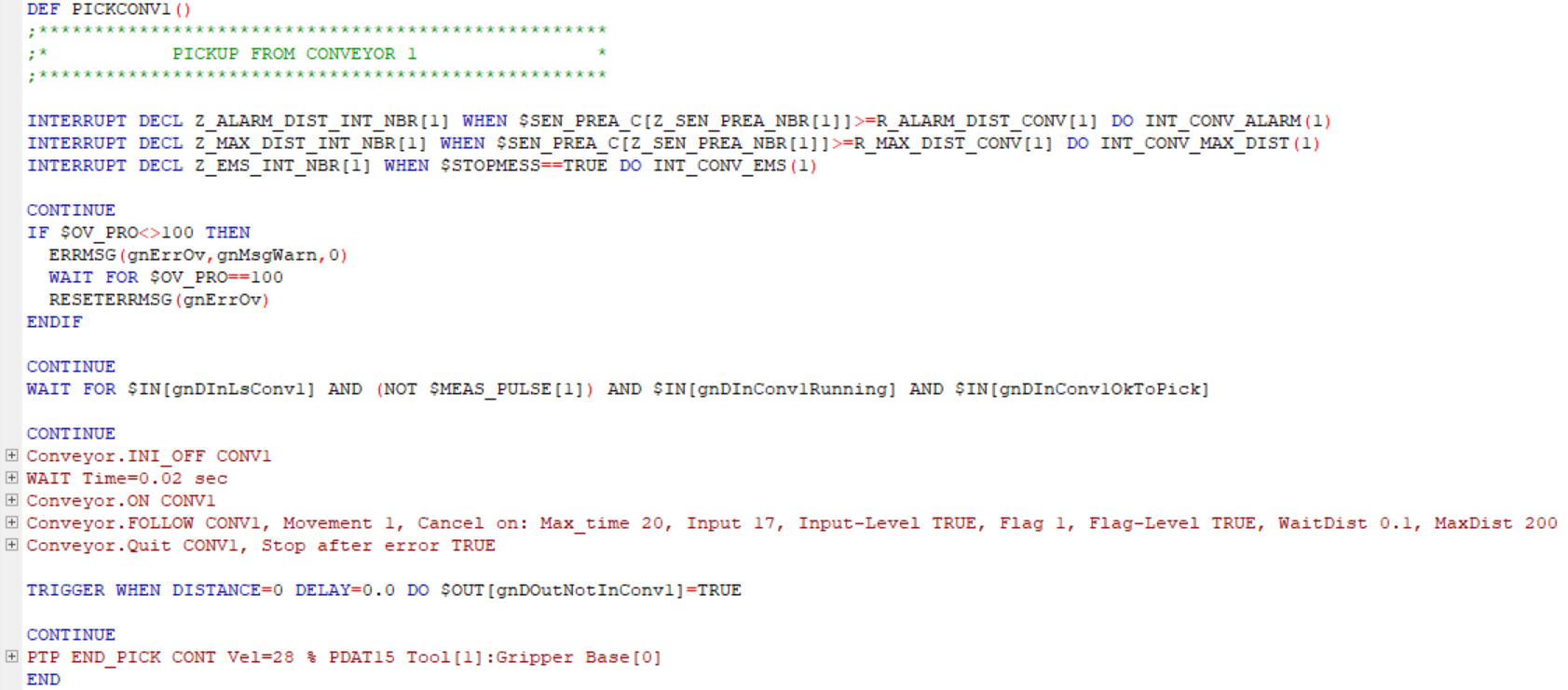
中断声明:

报警距离中断:达到警戒距离时触发
INT_CONV_ALARM最大距离中断:超过最大允许距离时触发
INT_CONV_MAX_DIST急停中断:出现急停信号时触发
INT_CONV_EMS
速度检查:
确保程序以 100% 速度运行
非全速时发出警告并等待速度恢复
等待拾取条件:
WAIT FOR $IN[gnDInLsConv1] AND (NOT $MEAS_PULSE[1]) AND $IN[gnDInConv1Running] AND $IN[gnDInConv1OkToPick]
得同时满足以下信号:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号