ros批量发布静态变换的两种方法
ROS发布静态坐标变化
消息类型
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/Transform transform
geometry_msgs/Vector3 translation
float64 x
float64 y
float64 z
geometry_msgs/Quaternion rotation
float64 x
float64 y
float64 z
float64 w
例程(方法一)
#include <ros/ros.h>
#include "tf2_ros/static_transform_broadcaster.h"
#include"geometry_msgs/TransformStamped.h" //静态坐标消息类型
#include "tf2/LinearMath/Quaternion.h" //欧拉角-四元数转换
#include <bits/stdc++.h> //c++标准库
int main(int argc, char *argv[]){
ros::init(argc,argv,"static_tf"); //初始化节点
ros::NodeHandle nh; //创建句柄
tf2_ros::StaticTransformBroadcaster pub ; //创建发布者
int id = 101; //初始tag的编号
double x = 0.3, y = 0.3; //初始tag的坐标
for(int i = 1; i <= 9; i ++){
for(int j = 1; j <= 13; j ++){
geometry_msgs::TransformStamped ts; //创建geometry_msgs命名空间下TransformStamped类型的变量,名为ts
ts.header.seq = 100; // consecutively increasing ID
ts.header.stamp = ros::Time::now(); //时间戳
ts.header.frame_id = "map"; //父坐标系名称(数据类型string)
ts.child_frame_id = "tag_" + std::to_string(id); //子坐标系名称(数据类型string)
ts.transform.translation.x = x; //将计算出的坐标封装在ts中
ts.transform.translation.y = y;
ts.transform.translation.z = 0;
tf2::Quaternion qtn; //创建四元数变量
qtn.setRPY(1.57,0,0); //将欧拉角转化为四元数(因为在TransformStamped类型中,用四元数表示位姿)
ts.transform.rotation.x = qtn.getX(); //将计算出的欧拉角封装在ts变量中
ts.transform.rotation.y = qtn.getY();
ts.transform.rotation.z = qtn.getZ();
ts.transform.rotation.w = qtn.getW();
pub.sendTransform(ts); //发送静态坐标信息
id ++;
x += 0.6;
}
y += 0.6;
x = 0.3;
}
ros::spin(); //阻塞程序,防止节点运行完自动关闭.
return 0;
}
例程(方法二)
通过调用tf2_ros中的工具,通过launch文件发布静态变换
static_transform_publisher x y z yaw pitch roll frame_id child_frame_id
static_transform_publisher x y z qx qy qz qw frame_id child_frame_id
<launch>
<node pkg="tf2_ros" type="static_transform_publisher" name="link1_broadcaster" args="1 0 0 0 0 0 1 link1_parent link1" />
</launch>
通过简单程序批量生成以上格式的字符串即可。
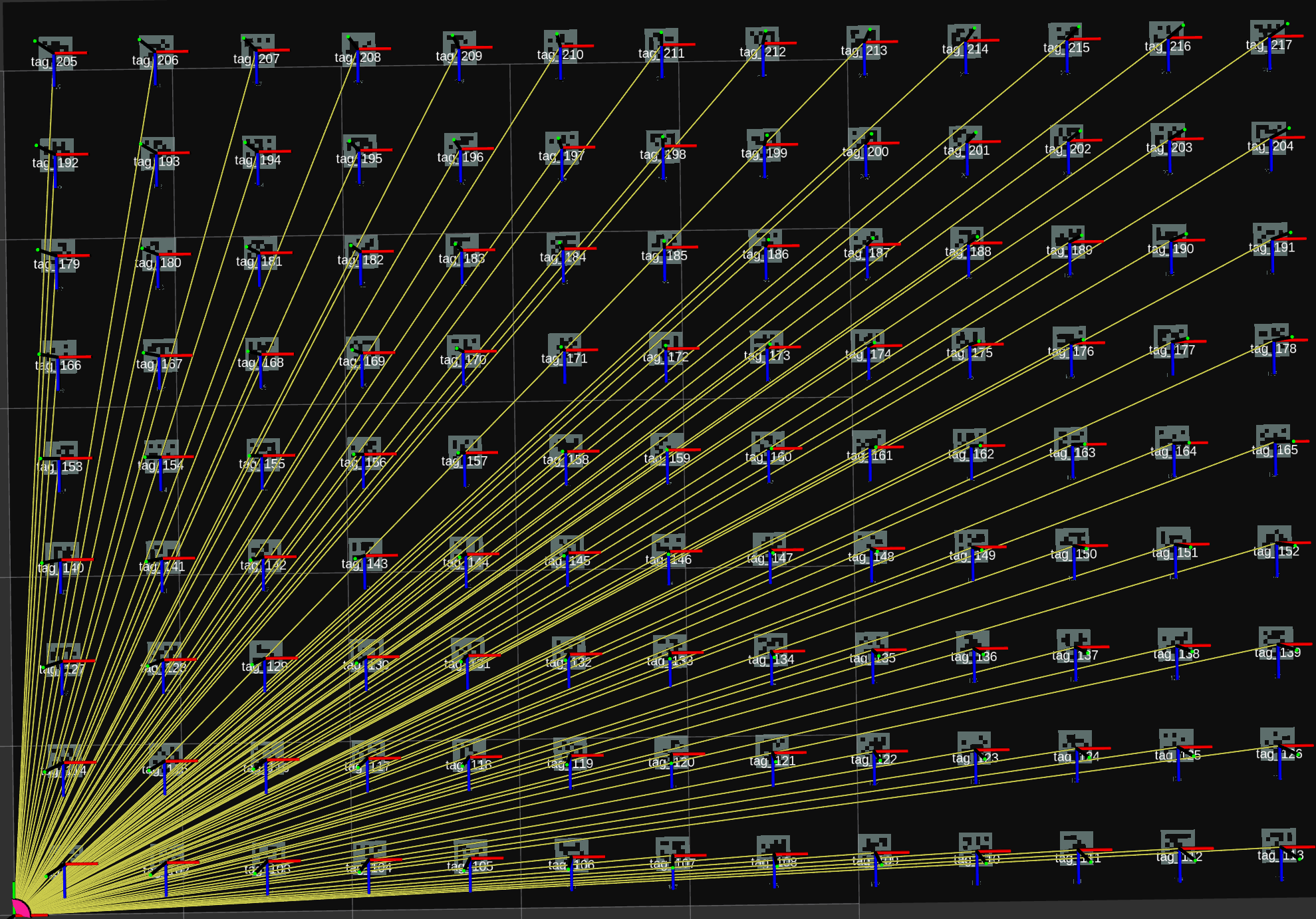
效果

 浙公网安备 33010602011771号
浙公网安备 33010602011771号