自动驾驶系统关系与自动泊车原理
自动驾驶系统关系与自动泊车原理
1. 自动驾驶系统关系
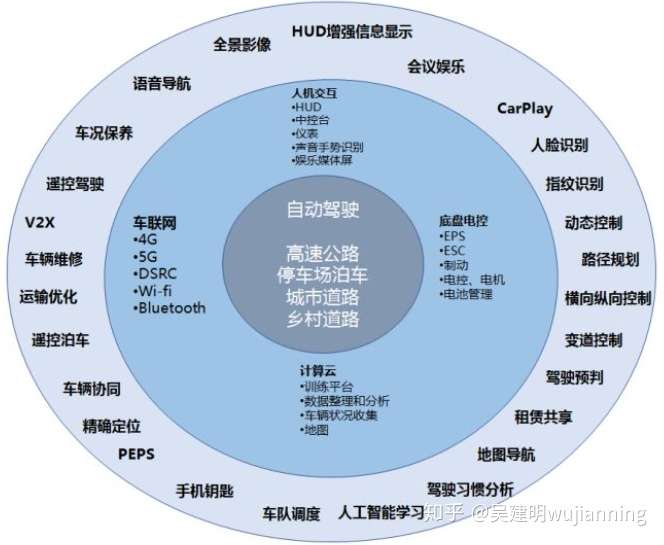
图1. 自动驾驶系统关系
2.关键算法解析——自动泊车
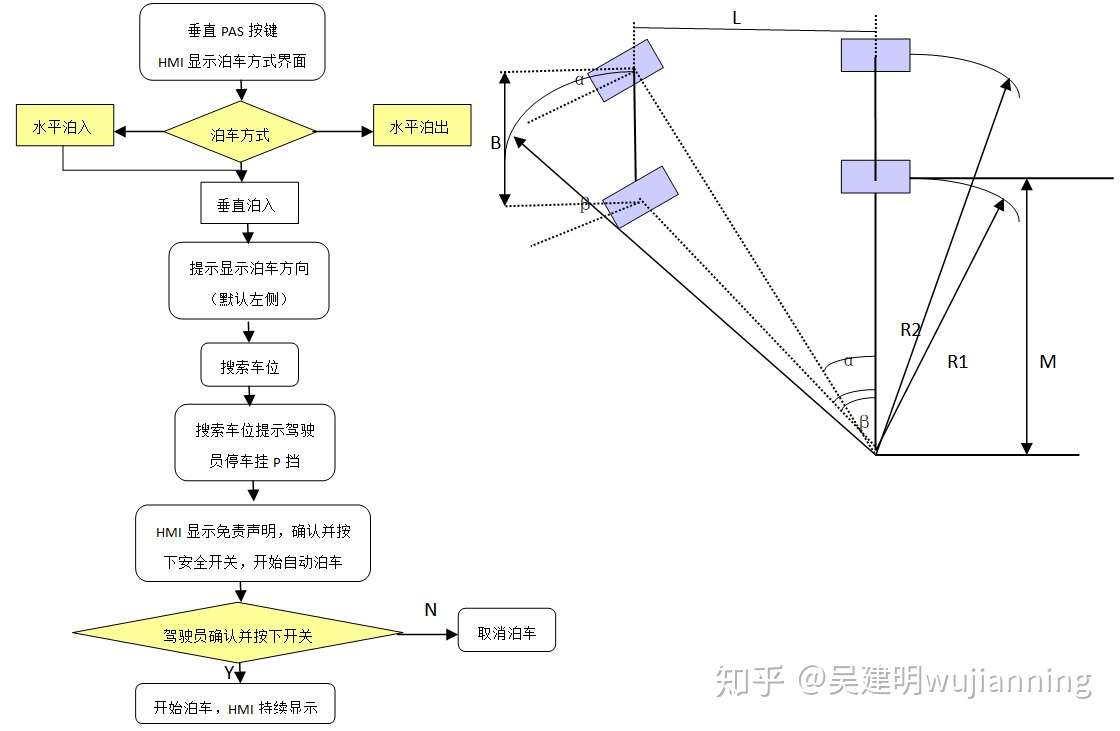
图2. 关键算法解析——自动泊车
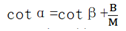
外侧转角α和内侧转角β如下关系式
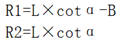
后轮内侧转弯半径R1,后轮外侧转弯半径R2,分别为
根据几何关系,后轴中心点

与前轴中心点

求导得到速度关系
以后轴中心为基准点,车辆低速运动学模型为
人工智能芯片与自动驾驶

自动驾驶系统关系与自动泊车原理
1. 自动驾驶系统关系
图1. 自动驾驶系统关系
2.关键算法解析——自动泊车
图2. 关键算法解析——自动泊车
外侧转角α和内侧转角β如下关系式
后轮内侧转弯半径R1,后轮外侧转弯半径R2,分别为
根据几何关系,后轴中心点
与前轴中心点
求导得到速度关系
以后轴中心为基准点,车辆低速运动学模型为

 浙公网安备 33010602011771号
浙公网安备 33010602011771号