为什么轴在执行主动回原点命令时,初始方向没有找到原点,当需要碰到限位开关掉头继续寻找原点开关时并没有掉头,而是直接报错停止轴,报错原因是由于轴碰到了限位开关?
有几种可能:
①用户没有使能“允许硬件限位开关处自动反转”的选项。 如图 3 所示。

②工艺对象组态的硬件开关上/下限位输入点与实际的输入点不符。例:上限位组态为I0.0,下限位组态为I0.1,但实际I0.1为上限位,I0.0为下限位。
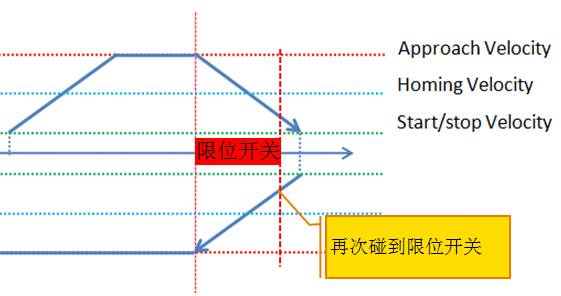
③轴在主动回原点期间到达硬件限位开关,轴将以组态的减速度减速,减速到启动/停止速度后反向运行寻找原点开关。如果限位开关行程过短,减速到启动/停止速度时轴运行超出了限位行程,在反向过程中会再次碰到限位开关,如下图所示,轴此时直接停止。如图 4 所示。(个人想法补充:若硬限位开关硬件限制制动距离很短,而加减速时间过长,导致制动距离不够,会一直触碰在限位开关处。而PLC下发回转命令后,还是在限位开关处,情况和上诉类似。)
这种情况可以通过增加限位开关行程、增大组态的加速度/减速度或降低寻找原点时的逼近速度解决。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号