tensor张量数据结构
一、张量的基本属性
主要有三个属性:秩、轴、形状
- 秩:主要告诉我们是张量的维度,其实就是告诉我们是几维向量,通过多少个索引就可以访问到元素。
- 轴:在张量中,轴是指张量的一个维度。当处理多维数据时,每个维度都可以被称为一个轴。通常,第一个轴称为0轴(或轴0),第二个轴称为1轴(或轴1),以此类推。同索引从0开始计算
- 形状:形状是指张量在每个轴上的维度大小。它是一个由整数组成的元组,表示张量沿着每个轴的大小。
![image]()

二、张量的直观理解
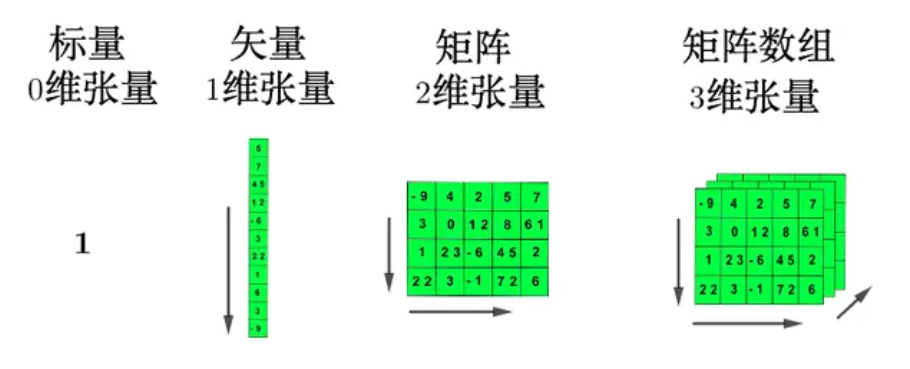
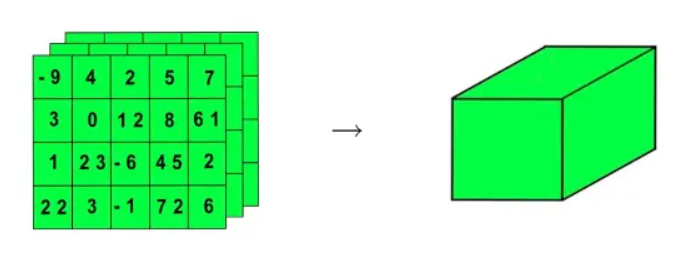
2.1把3维张量抽象成立方体
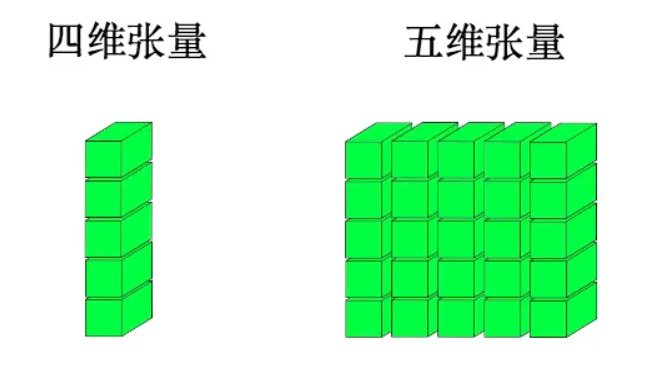
2.2更高维度
三、实践
3.1 0维张量(标量)
# 0维张量(标量)
tensor_0d = np.array(42)
print("0维张量:", tensor_0d)
print("维度:", tensor_0d.ndim)
print("形状:", tensor_0d.shape)
0维张量: 42
维度: 0
形状: ()
3.2 1维张量(向量)
#1维张量(向量)
tensor_1d = np.array([1, 2, 3])
print("1维张量:", tensor_1d)
print("维度:", tensor_1d.ndim)
print("形状:", tensor_1d.shape)
1维张量: [1 2 3]
维度: 1
形状: (3,)
3.3 2维张量(矩阵)
# 2维张量(矩阵)
tensor_2d = np.array([[1, 2], [3, 4]])
print("2维张量:\n", tensor_2d)
print("维度:", tensor_2d.ndim)
print("形状:", tensor_2d.shape)
2维张量:
[[1 2]
[3 4]]
维度: 2
形状: (2, 2)
3.4 3维张量
tensor_3d = np.array([[[1, 2], [3, 4]], [[5, 6], [7, 8]]])
print("3维张量:\n", tensor_3d)
print("维度:", tensor_3d.ndim)
print("形状:", tensor_3d.shape)
3维张量:
[[[1 2]
[3 4]]
[[5 6]
[7 8]]]
维度: 3
形状: (2, 2, 2)
3.5 4维张量(例如:批量图像数据)
tensor_4d = np.random.rand(2, 3, 4, 4) # 模拟批量为2,3通道,4x4像素的图像
print("4维张量(形状):", tensor_4d.shape)
print("维度:", tensor_4d.ndim)
4维张量:
[[[[0.76158905 0.50889347 0.71815367 0.69304463]
[0.52520525 0.72555674 0.85270496 0.32378587]
[0.59526167 0.32792191 0.50123455 0.10833325]
[0.59880688 0.59677855 0.88285572 0.4809848 ]]
[[0.36305307 0.06960381 0.92678542 0.59274188]
[0.87533014 0.02521611 0.17350617 0.67618351]
[0.18962636 0.09359039 0.04388708 0.87022525]
[0.1629622 0.87446195 0.02532257 0.7190841 ]]
[[0.0948755 0.19565576 0.01435343 0.71796839]
[0.96410618 0.43856238 0.87676871 0.20652258]
[0.33341796 0.19967975 0.43732216 0.44578688]
[0.2204978 0.63834847 0.0398312 0.41826523]]]
[[[0.76582446 0.28175843 0.75353101 0.01103086]
[0.32532059 0.63380096 0.17306901 0.1625022 ]
[0.05411325 0.73074117 0.66645972 0.46794851]
[0.22031948 0.23594482 0.50791974 0.51469159]]
[[0.60389647 0.86939317 0.36047495 0.37041494]
[0.29389263 0.0907861 0.32717963 0.37871522]
[0.46937278 0.62275192 0.45777425 0.97372567]
[0.70629123 0.69301768 0.56032817 0.85254206]]
[[0.03950869 0.90353414 0.05431898 0.47064513]
[0.10020516 0.31592422 0.637032 0.03238864]
[0.97464485 0.7579741 0.59497893 0.08251099]
[0.19593545 0.50460934 0.29095014 0.1346555 ]]]]
4维张量(形状): (2, 3, 4, 4)
维度: 4
四、加深理解
4.1什么是“维度”(Dimension / ndim)?
在张量中,维度(或称为“秩” rank)指的是你访问一个元素时需要提供的索引数量。
✅ 举个例子:
| 张量类型 | 示例 | 维度(ndim) | 说明 |
|---|---|---|---|
| 0维(标量) | 5 | 0 | 不需要索引,直接就是值 |
| 1维(向量) | [1, 2, 3] | 1 | 要用一个索引,如 x[0] |
| 2维(矩阵) | [[1, 2], [3, 4]] | 2 | 需要两个索引,如 x[0][1] |
| 3维张量 | [[[1, 2], [3, 4]], [[5, 6], [7, 8]]] | 3 | 需要三个索引,如 x[0][1][0] |
📌 理解技巧:
维度 = 你访问一个具体数字需要下标几次。
4.2什么是“形状”(Shape / shape)?
形状是一个元组(tuple),表示张量在每个维度上的大小。
| 张量 | 形状(shape) | 含义 |
|---|---|---|
| 5 | () | 0维,标量 |
| [1, 2, 3] | (3,) | 1维向量,长度为3 |
| [[1, 2], [3, 4]] | (2, 2) | 2维矩阵,2行2列 |
| [[[1, 2], [3, 4]], [[5, 6], [7, 8]]] | (2, 2, 2) | 3维张量:2块,每块2行2列 |
| np.random.rand(3, 4, 5) | (3, 4, 5) | 3维张量:3个4行5列的矩阵 |
4.3📌 总结对比:
| 概念 | 含义 | 示例 |
|---|---|---|
| 维度(ndim) | 张量有多少个轴(axes) | 0维:标量;1维:向量…… |
| 形状(shape) | 每个轴上有多少个元素(元素数量分布) | (2, 3) 表示第一个轴有2个元素,第二个轴有3个 |
3维可以理解为“个数、行、列”
4.4更高维度理解
4.4.1✅ 4维张量例子
假设有一个4维张量,形状为 (N, C, H, W),这在深度学习中经常用来表示一批图像数据:
- N:批次大小(Batch Size),表示有多少张图片。
- C:通道数(Channels),比如RGB图像有3个通道。
- H:高度(Height),图像的高度。
- W:宽度(Width),图像的宽度。
因此,你可以这样想:你有一堆相册(N),每个相册里有不同的照片集(C),每张照片都是由像素组成的二维网格(H x W)。
4.4.2🧩 5维张量例子
如果再增加一维,考虑一个形状为 (T, N, C, H, W) 的5维张量:
T:时间步长(Time Steps),如果你正在处理视频数据,那么T代表视频中的帧数。
其余四个维度保持不变,即批量大小(N)、通道数(C)、高度(H)和宽度(W)。
所以,5维张量可以被想象成一系列视频序列,其中每个序列包含多个帧(T),每个帧又由多张图片组成(N),每张图片有多条信息通道(C),每条通道上的图像是由像素组成的二维网格(H x W)。
五、张量的应用场景
5.1你有一段 10 分钟的视频,想用深度学习来处理它(比如做动作识别、视频分类等),那怎么把它变成一个张量呢?
一、视频的基本结构
一段 10 分钟的视频,其实是由很多帧(frame)组成的,就像一本翻页动画一样。
📌 假设:
视频帧率是 30 FPS(每秒30帧)
视频时长是 10 分钟 = 600 秒
总帧数 = 30 × 600 = 18,000 帧
也就是说,这段视频可以看作是一个很长的帧序列:
[帧1, 帧2, 帧3, ..., 帧18000]
二、为什么要“分段”?怎么分?
1.为什么要分段?
因为:
18,000 帧的数据量太大,不能一次性输入模型。
模型一般处理的是固定长度的视频片段。
有些任务(如动作识别)只需要分析局部动作片段,而不是整个10分钟。
2.怎么分段?
常见的做法是:滑动窗口采样 或 均匀采样。
三、这些“片段”如何变成张量?
我们以一个片段为例来说明。
假设:
每个片段有 10 帧(T=10)
每帧是 RGB 图像(C=3),大小是 224×224(H=224, W=224)
(T, C, H, W) = (10, 3, 224, 224)
这里就是图片处理了,可以把10帧理解为10张图片
四、如果我要批量处理多个视频呢?
比如你有 32 个视频,每个视频取一个片段(10帧),那么输入张量的形状就是:
(N, T, C, H, W) = (32, 10, 3, 224, 224)
N=32:32 个视频
T=10:每个视频取10帧
C=3:RGB 三通道
H=224, W=224:图像尺寸
这就是一个 5维张量,它非常适合用于视频分类、动作识别等模型的输入。
五、个人疑问
训练时不用每一帧吗?32个视频每个只提取10帧吗?会不会太少。或者我可不可以理解为一段10分钟的视频分割为32段,每段包含10帧,这样是不是就全部提取到了
🎯 一、训练时是不是只用每个视频的10帧?会不会太少?
✅ 答案:
不是“只用”10帧,而是每次训练用10帧,但整个训练过程会遍历视频的所有帧。
这就像:
你有一个很长的句子,模型每次只看一部分(比如10个词),但通过多次训练,模型可以“看到”整个句子。
📌 举个例子:
你有一个视频有 1000 帧
每次训练取一个片段(10帧)
你可以使用 滑动窗口 或 随机采样 的方式:
- 第一次训练:帧 0~9
- 第二次训练:帧 5~14
- 第三次训练:帧 10~19
- ...
- 最后一次训练:帧 990~999
这样,整个训练过程中,模型就能看到整个视频的内容。
二、32个视频每个只提取10帧?
✅ 答案:
是的,在一次训练迭代(batch)中,每个视频只取10帧,但这不是“只取一次”,而是每次训练时都取不同的片段。
📌 举个例子:
你有 32 个视频(N=32)
每次训练时,从每个视频中随机采样10帧(T=10)
这些帧可能来自视频的不同部分(比如开头、中间、结尾)
这样做的目的是:
- 提高模型的泛化能力
- 防止模型只记住某一段内容
三、是不是可以把一个视频分成32段,每段10帧,这样就覆盖全部帧?
✅ 答案:
是的,这是一种更密集地覆盖视频内容的方法,常用于推理(inference)阶段,而不是训练。
📌 举个例子:
一个视频有 320 帧
你可以把它分成 32 段,每段 10 帧
每段输入模型,得到一个预测结果
最后把 32 个预测结果平均或融合,得到最终结果
这叫作 “多片段测试”(multi-crop testing)或“滑动窗口推理”
四、总结:训练 vs 推理中的不同处理方式
| 场景 | 目的 | 处理方式 | 张量形状 |
|---|---|---|---|
| 训练时 | 提高泛化能力,防止过拟合 | 每个视频随机采样 10 帧 | (32, 10, 3, 224, 224) |
| 推理时 | 充分利用视频信息,提高准确率 | 一个视频采样多个片段(如32段) | (32, 10, 3, 224, 224) |
六、个人疑问
为什么采用批次训练,是希望最少的训练,获得接近真实的效果吗
为什么使用“批次训练”(Mini-batch Training)?
✅ 简短回答:
使用批次训练是为了在训练速度、内存占用和模型泛化能力之间取得最佳平衡。
📌 一、先说说“训练”的目标
我们的目标是让模型尽可能准确地学习数据的规律,也就是:
在训练数据上表现好 ✅
在新数据(测试数据)上也表现好(泛化能力强) ✅
为了达到这个目标,我们需要:
- 高效地计算梯度
- 稳定地更新参数
- 防止过拟合
二、三种训练方式对比
| 类型 | 每次训练使用的样本数 | 特点 | 优点 | 缺点 |
|---|---|---|---|---|
| 批量训练(Batch Training) | 整个训练集 | 参数更新非常稳定 | 准确率高 | 计算慢,内存占用大,无法训练大数据集 |
| 随机训练(Stochastic Training) | 1个样本 | 每次更新参数非常快 | 快速适应变化 | 更新不稳定,容易震荡,收敛困难 |
| 小批量训练(Mini-batch Training) | 一小批(如32、64、128个) | 折中方案 | ✅ 快速 + 稳定 + 内存可控 | 需要调参(如 batch size) |
三、关于“希望最少的训练,获得接近真实的效果”这句话的理解
我们可以这样理解:
✅ “使用小批量训练,是为了在尽可能少的训练次数中,让模型学到数据的整体分布规律,从而在新数据上也有好的表现。”
也就是说:
- 不是“最少的训练”,而是“最有效的训练”。
- 用小批量数据,让每次更新都尽量接近真实梯度。
- 通过多次迭代,让模型逐步逼近全局最优解。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号