《opencv学习》 之 特征检测与匹配
这几天学习SURF特征检测,直接看的视频和书本有点吃不消,现在是基本看懂了,如果写博客记录没有必要,因为网上都差不多,笔记都在书上了,以下是个人认为比较浅显易懂的文章,当然海有很多好文章我没看到。
看第一篇入门就可以,后面讲的不是很好: http://blog.csdn.net/jwh_bupt/article/details/7621681
harris: http://www.cnblogs.com/ronny/p/4009425.html
Harr: http://blog.csdn.net/zouxy09/article/details/7929570/
Box Filters: http://blog.csdn.net/lanbing510/article/details/28696833
SIFT: http://blog.csdn.net/abcjennifer/article/details/7639681/ http://blog.csdn.net/pi9nc/article/details/23302075
Harr小波特征: 场合不同这个表示也不同,比如在SURF中表示dx、dy,当然也可以表示成其它样子,得看Harr的内核
SURF: 看一下毛星云的那本书,其实网上说的差不多。
ORB: http://www.aiuxian.com/article/p-1728722.html,里面包括FAST特征点、BRIEF描述子
HOG: 这个算法相对比较上面容易理解。
LBP: http://blog.csdn.net/quincuntial/article/details/50541815这个算法可以手写实现,上面基本自己都实现不了(难度很大)
双线性插值: 百度百科有(先有三角函数计算坐标位置,然后用双线性插值计算像素值)
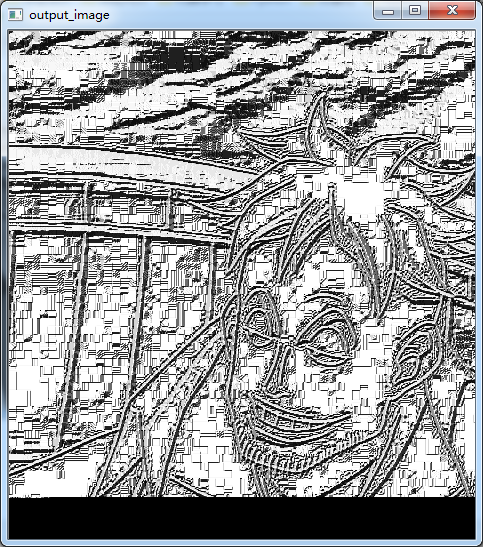
LBP算子
经典LBP算法:
1 int main(int argc, char**argv) 2 { 3 Mat input_image, Middle_image,threshold_image; 4 input_image = imread("1.jpg"); 5 if (input_image.data == NULL) { 6 return -1; cout << "can't open image.../"; 7 } 8 cvtColor(input_image, input_image, CV_BGR2GRAY); 9 Mat output_image; 10 output_image.create(Size(input_image.rows - 2, input_image.cols - 2), input_image.type()); 11 output_image.setTo(0, Mat()); 12 int width = input_image.cols * input_image.channels(); 13 int heigth = input_image.rows; 14 for (size_t i = 1; i < heigth - 1; i++) 15 { 16 //uchar *ptr = input_image.ptr<uchar>(i); 17 for (size_t j = 1; j < width - 1; j++) 18 { 19 uchar code = 0; 20 uchar center = input_image.at<uchar>(i, j); 21 code |= (input_image.at<uchar>(i - 1, j - 1) >= center) << 7; 22 code |= (input_image.at<uchar>(i - 1, j ) >= center) << 6; 23 code |= (input_image.at<uchar>(i - 1, j + 1) >= center) << 5; 24 code |= (input_image.at<uchar>(i , j - 1) >= center) << 4; 25 code |= (input_image.at<uchar>(i , j + 1) >= center) << 3; 26 code |= (input_image.at<uchar>(i + 1, j - 1) >= center) << 2; 27 code |= (input_image.at<uchar>(i + 1, j ) >= center) << 1; 28 code |= (input_image.at<uchar>(i + 1, j + 1) >= center) << 0; 29 output_image.at<uchar>(i - 1, j - 1) = code; 30 } 31 } 32 imshow("LineImage", input_image); 33 imshow("output_image", output_image); 34 35 waitKey(0); 36 return 0; 37 }

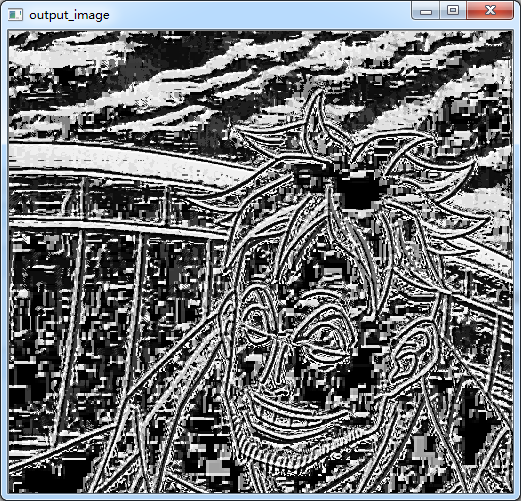
CLBP:
1 #include <opencv2/opencv.hpp> 2 #include <iostream> 3 4 using namespace cv; 5 using namespace std; 6 7 const int neighbor = 8;//圆周上共几个像素 8 const int radius = 3; 9 10 int main(int argc, char**argv) 11 { 12 Mat input_image, output_image; 13 input_image = imread("1.jpg"); 14 15 if (input_image.data == NULL) { 16 return -1; cout << "can't open image.../"; 17 } 18 cvtColor(input_image, input_image, CV_BGR2GRAY); 19 //Mat output_image = Mat::zeros(Size(input_image.cols - 2 * 30, input_image.rows - 2 * 30), CV_8UC1); 20 output_image.create(Size(input_image.cols - 2* radius, input_image.rows - 2*radius), CV_8UC1); 21 output_image.setTo(0); 22 int width = input_image.cols; 23 int height = input_image.rows; 24 25 26 for (size_t n = 0; n < neighbor; n++) 27 { 28 //-----计算圆边长点的坐标(这里x、y具体谁用cos和sin的结果一样,看后来计算双线性插值自己怎么理解了) 29 float x = static_cast<float>(radius) * cos(2.0 * CV_PI*n / static_cast<float>(neighbor)); 30 float y = static_cast<float>(-radius) * sin(2.0 * CV_PI*n / static_cast<float>(neighbor));//这里加不加负号效果一样,因为是点的顺序而已。 31 //-----计算圆边上点的像素值,用双线性插值方法 32 int fx = static_cast<int>(floor(x)); 33 int fy = static_cast<int>(floor(y));//上采样 34 int cx = static_cast<int>(ceil(x)); 35 int cy = static_cast<int>(ceil(y));//下采样 36 37 float dx = x - fx; 38 float dy = y - fy; 39 40 float w1 = (1 - dx)*(1 - dy); 41 float w2 = dx*(1 - dy); 42 float w3 = (1 - dx)*dy; 43 float w4 = dx*dy; 44 45 for (size_t i = radius; i < height - radius; i++) 46 { 47 for (size_t j = radius; j < width - radius; j++) 48 { 49 float p1 = input_image.at<uchar>(i + fy, j + fx); 50 float p2 = input_image.at<uchar>(i + fy, j + cx); 51 float p3 = input_image.at<uchar>(i + cy, j + fx); 52 float p4 = input_image.at<uchar>(i + cy, j + cx); 53 54 float Angle_data = p1*w1 + p2*w2 + p3*w3 + p4*w4; 55 output_image.at<uchar>(i - radius, j - radius) |= (((input_image.at<uchar>(i, j) >= Angle_data) && (std::abs(Angle_data-input_image.at<uchar>(i,j)) > numeric_limits<float>::epsilon())) << n); 56 } 57 58 } 59 } 60 61 imshow("LineImage", input_image); 62 imshow("output_image", output_image); 63 64 waitKey(0); 65 return 0; 66 }

LBP后面还有很多知识,现在不学习那么深,只是了解一下,以后用到再继续深入。
SIFT算子
1 #if 1 2 #include <opencv2/opencv.hpp> 3 #include <opencv2/xfeatures2d.hpp> 4 #include <iostream> 5 #include "math.h" 6 7 using namespace cv::xfeatures2d; 8 using namespace cv; 9 using namespace std; 10 11 void calSIFTFeatureAndCompare(Mat& src1, Mat& src2); 12 13 int main(int argc, char**argv) 14 { 15 Mat input_image1, input_image2; 16 input_image1 = imread("hand1.jpg"); 17 input_image2 = imread("hand2.jpg"); 18 19 if (!input_image1.data && !input_image2.data) { 20 return -1; cout << "can't open image.../"; 21 } 22 calSIFTFeatureAndCompare(input_image1, input_image2); 23 /*imshow("input_image1", input_image1); 24 imshow("input_image2", input_image2);*/ 25 26 waitKey(0); 27 return 0; 28 } 29 //-------------特征点:如同harris等检测的点一样(当然加了更多的约束)--------------// 30 //-------------描述子:点形成组织性,有方向和区域等,更能代表整副图像(也就是在特征点上加了更多的约束) --------------// 31 void calSIFTFeatureAndCompare(Mat& src1,Mat& src2) 32 { 33 Mat grayMat1, grayMat2; 34 cvtColor(src1, grayMat1, CV_BGR2GRAY); 35 cvtColor(src2, grayMat2, CV_BGR2GRAY); 36 normalize(grayMat1, grayMat1, 0, 255, CV_MINMAX); 37 normalize(grayMat2, grayMat2, 0, 255, CV_MINMAX); 38 /*//---定义SIFT描述子 39 SiftFeatureDetector detector; //计算特征点 40 SiftDescriptorExtractor extractor;//计算描述子 41 //---特征点检测 42 vector<KeyPoint> keypoints1; 43 vector<KeyPoint> keypoints2; 44 detector.detect(grayMat1, keypoints1, Mat()); 45 detector.detect(grayMat2, keypoints2, Mat()); 46 //---计算特征点描述子 47 Mat descriptors1, descriptors2; 48 extractor.compute(grayMat1, keypoints1, descriptors1); 49 extractor.compute(grayMat2, keypoints2, descriptors2);*/ 50 //SURF* detector = SURF::create(100);//那道理说是可以的,但是奔溃,不知道原因 51 Ptr<SURF> detector = SURF::create(500);//这个参数hessianThreshold为海深矩阵的阈值T,看SIFT原理就可 52 vector<KeyPoint> keypoints1; 53 vector<KeyPoint> keypoints2; 54 Mat descriptors1, descriptors2; 55 //---特征点和描述子一起检测了 56 detector->detectAndCompute(grayMat1, Mat(), keypoints1, descriptors1); 57 detector->detectAndCompute(grayMat2, Mat(), keypoints2, descriptors2); 58 //---特征点匹配 59 vector<DMatch> matches;//存储匹配结果的类,和keypoint类似 60 BFMatcher matcher(NORM_L1); //NORM_L1:代表SIFT,NORM_L2:代表SURF,默认SURF 61 matcher.match(descriptors1, descriptors2, matches); 62 Mat resultMatch; 63 drawMatches(grayMat1, keypoints1, grayMat2, keypoints2, matches, resultMatch); 64 } 65 66 #endif

实际图片的匹配与寻找
在原图上截取的一个小图片进行测试---->>>>
本文利用SURF算子进行检测,利用FLANN进行匹配!

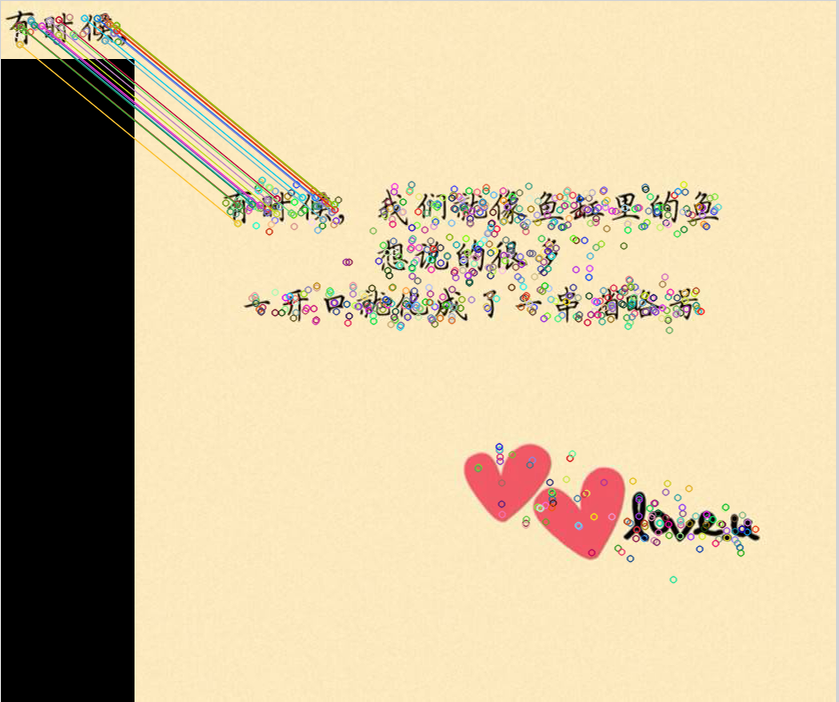
上代码:
1 #if 1 2 #include <opencv2/opencv.hpp> 3 #include <opencv2/xfeatures2d.hpp> 4 #include <iostream> 5 #include "math.h" 6 7 using namespace cv::xfeatures2d; 8 using namespace cv; 9 using namespace std; 10 11 12 int main(int argc, char**argv) 13 { 14 Mat input_image1, input_image2; 15 input_image1 = imread("2.jpg"); 16 input_image2 = imread("1.jpg"); 17 18 if (!input_image1.data && !input_image2.data) { 19 return -1; cout << "can't open image.../"; 20 } 21 //-------------keypoints and descriptor detection 22 const int minHessian = 400; 23 Ptr<SURF> detector = SURF::create(minHessian); 24 vector<KeyPoint> srcKeyPoint, dstKeyPoint; 25 Mat srcDescriptor, dstDescriptor; 26 detector->detectAndCompute(input_image1, Mat(), srcKeyPoint, srcDescriptor); 27 detector->detectAndCompute(input_image2, Mat(), dstKeyPoint, dstDescriptor); 28 //------------FLANN algorithm match 29 FlannBasedMatcher matcher; 30 vector<DMatch> matches; 31 matcher.match(srcDescriptor, dstDescriptor, matches); 32 Mat matchImage; 33 drawMatches(input_image1, srcKeyPoint, input_image2, dstKeyPoint, matches, matchImage); 34 //------------calculate best keypoint 35 double maxDistance = 0, minDistance = 10000; 36 for (size_t i = 0; i < matches.size(); i++) 37 { 38 maxDistance = maxDistance < matches[i].distance ? matches[i].distance : maxDistance; 39 minDistance = minDistance < matches[i].distance ? minDistance : matches[i].distance; 40 } 41 vector<DMatch> bestMatches; 42 for (size_t i = 0; i < matches.size(); i++) 43 { 44 if (matches[i].distance < 3 * minDistance) 45 { 46 bestMatches.push_back(matches[i]); 47 } 48 } 49 Mat bestMatchImage; 50 drawMatches(input_image1, srcKeyPoint, input_image2, dstKeyPoint, bestMatches, bestMatchImage); 51 //-----------Find four corner points from bestMatches 52 vector<Point2f> srcPoint; 53 vector<Point2f> dstPoint; 54 for (size_t i = 0; i < bestMatches.size(); i++)//save coordinate to srcPoint/dstPoint from bestMatches 55 { 56 srcPoint.push_back(srcKeyPoint[bestMatches[i].queryIdx].pt); 57 dstPoint.push_back(dstKeyPoint[bestMatches[i].trainIdx].pt); 58 } 59 Mat H = findHomography(srcPoint, dstPoint,CV_RANSAC);//detection perspective Mapping(H映射) 60 vector<Point2f> srcCorners(4); 61 vector<Point2f> dstCorners(4); 62 srcCorners[0] = Point(0, 0); 63 srcCorners[1] = Point(input_image1.cols, 0); 64 srcCorners[2] = Point(0, input_image1.rows); 65 srcCorners[3] = Point(input_image1.cols, input_image1.rows); 66 perspectiveTransform(srcCorners, dstCorners, H);//detection destination Corners 67 line(input_image2, dstCorners[0], dstCorners[1], Scalar(255, 255, 0), 2); 68 line(input_image2, dstCorners[0], dstCorners[2], Scalar(255, 255, 0), 2); 69 line(input_image2, dstCorners[1], dstCorners[3], Scalar(255, 255, 0), 2); 70 line(input_image2, dstCorners[2], dstCorners[3], Scalar(255, 255, 0), 2); 71 waitKey(0); 72 return 0; 73 } 74 75 76 #endif
-------------------------------------------
个性签名:衣带渐宽终不悔,为伊消得人憔悴!
如果觉得这篇文章对你有小小的帮助的话,记得关注再下的公众号,同时在右下角点个“推荐”哦,博主在此感谢!


 浙公网安备 33010602011771号
浙公网安备 33010602011771号