

现代计算机图形学——P3. Transformation-2D
- P3. Transformation
- P3. Transformation
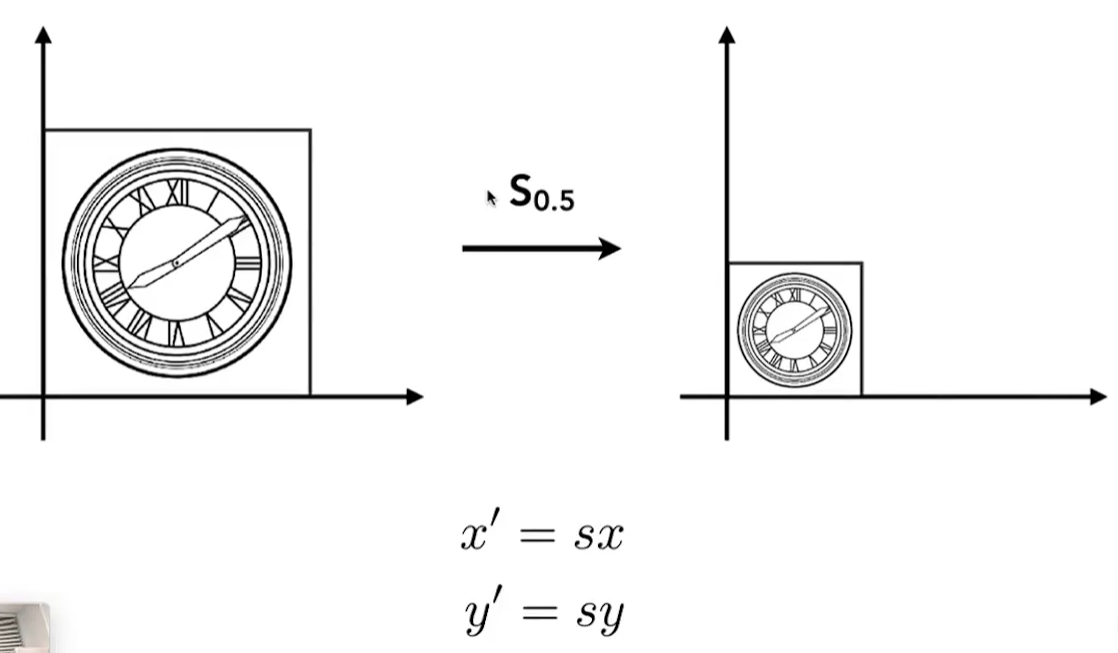
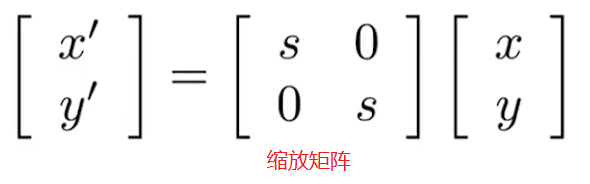
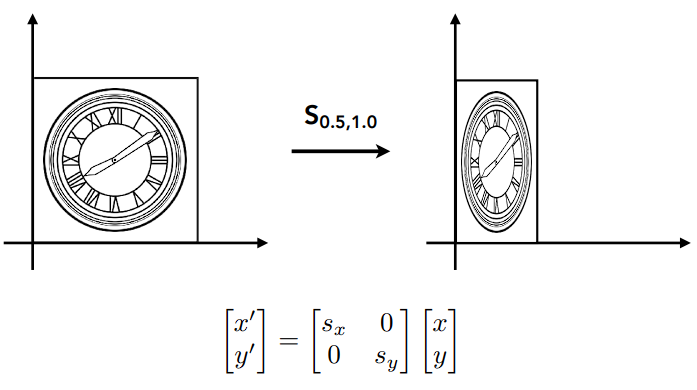
矩阵和变换联系起来
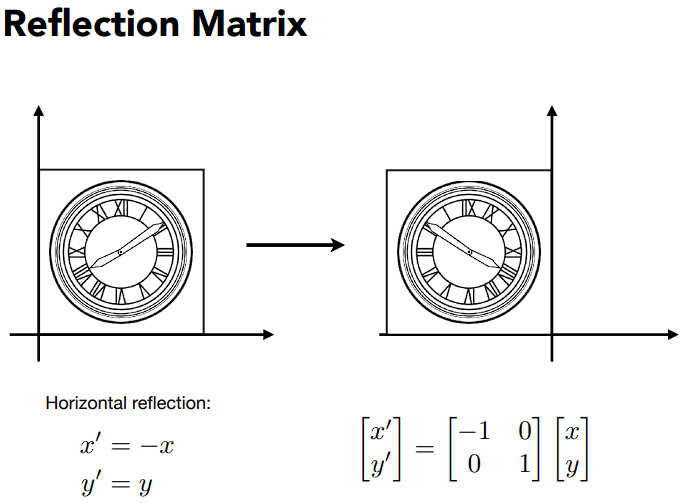
Reflection Matrix(反射矩阵(名字不重要)):
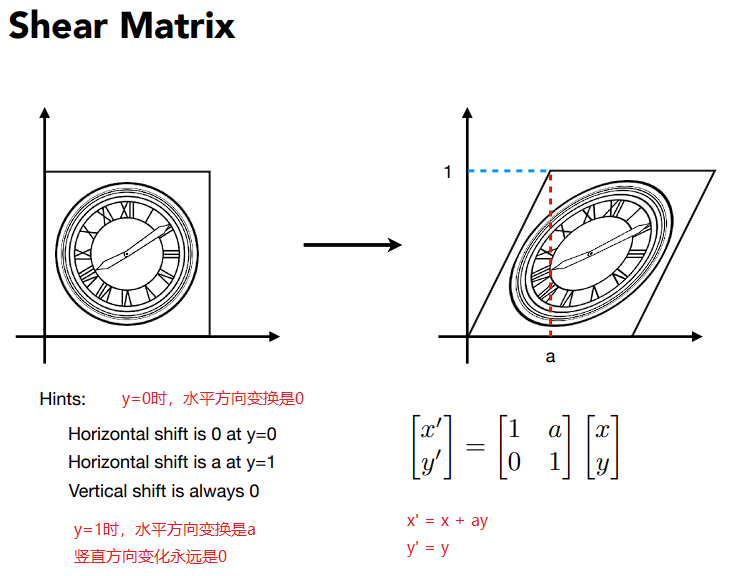
切变:
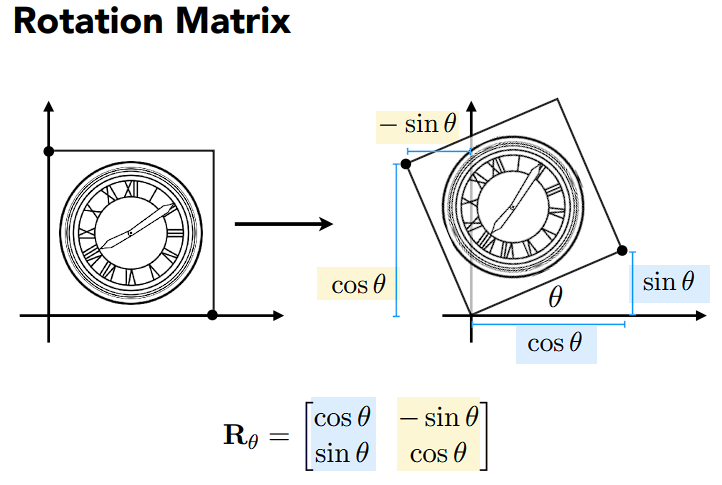
旋转:
推导:
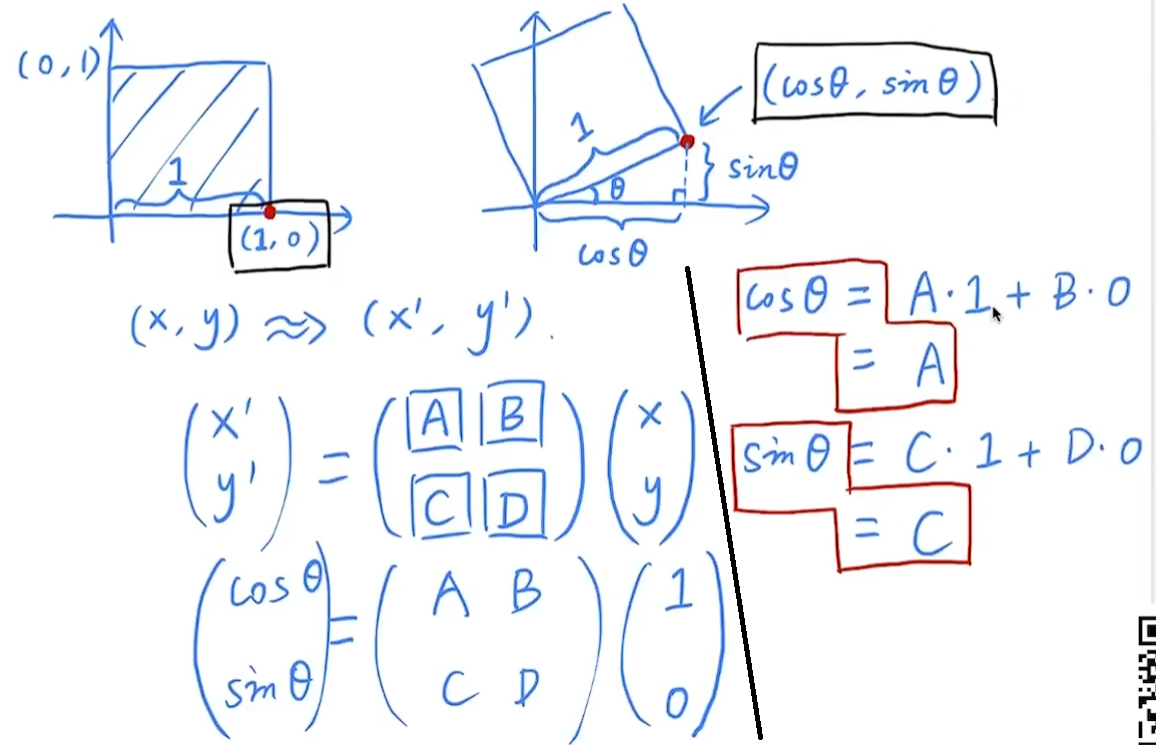 旋转矩阵中的B和D可以用(0,1)这个点来推算
旋转矩阵中的B和D可以用(0,1)这个点来推算
线性变换:
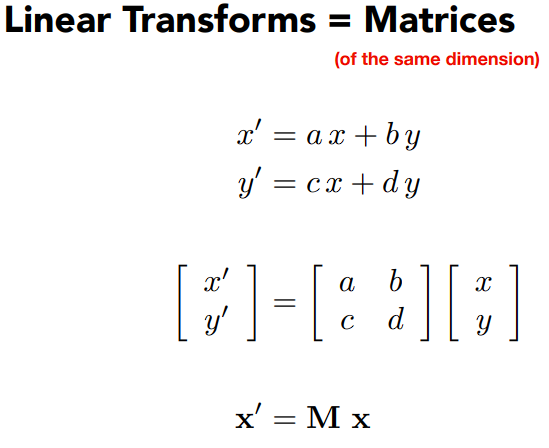 (先不管这个M)
(先不管这个M)
齐次坐标
为什么要用齐次坐标:
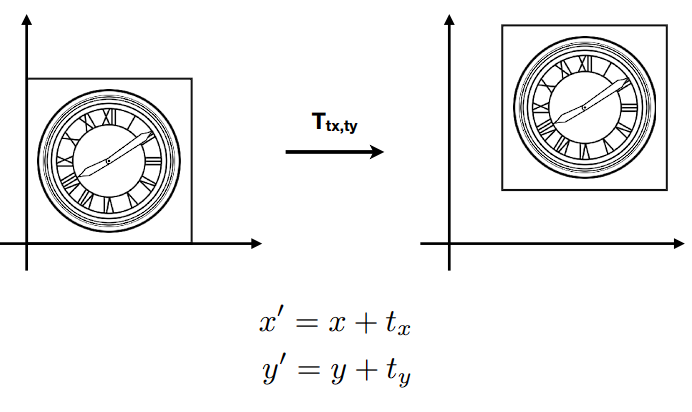
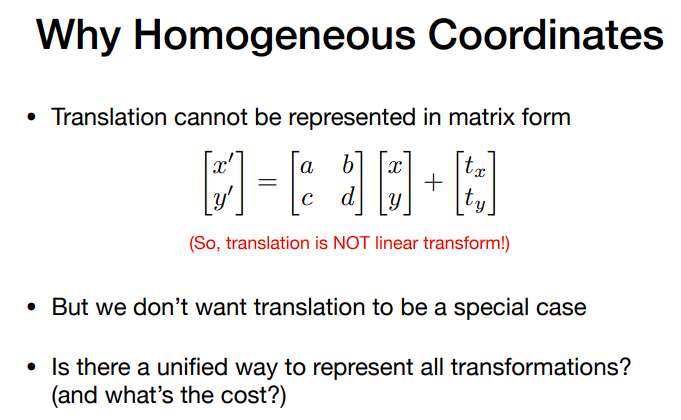
平移变换不能用线性变换(矩阵乘向量)表示
平移变换用线性变换表示的解决方法:齐次坐标(增加一个维度;齐次坐标就是将一个原本是n维的向量用一个n+1维向量来表示)
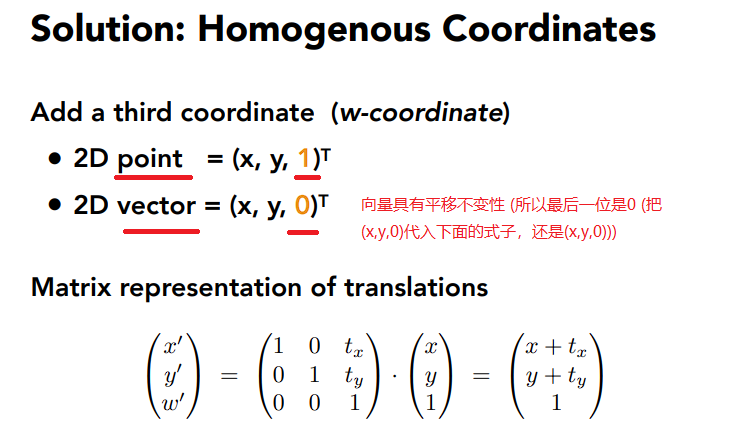
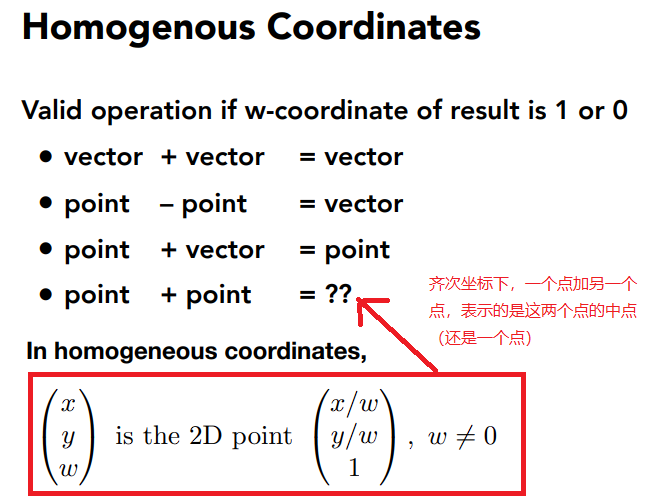
引用齐次坐标的目的:把所有变化都写成一个矩阵乘一个向量的形式
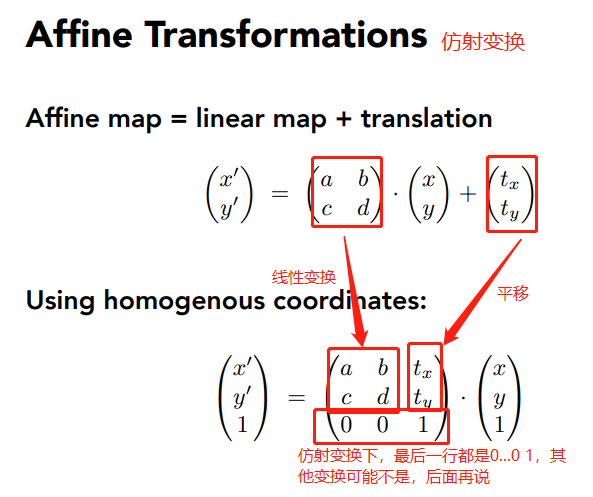 (上面是先线性变换,再平移,下面齐次坐标也是)
(上面是先线性变换,再平移,下面齐次坐标也是)
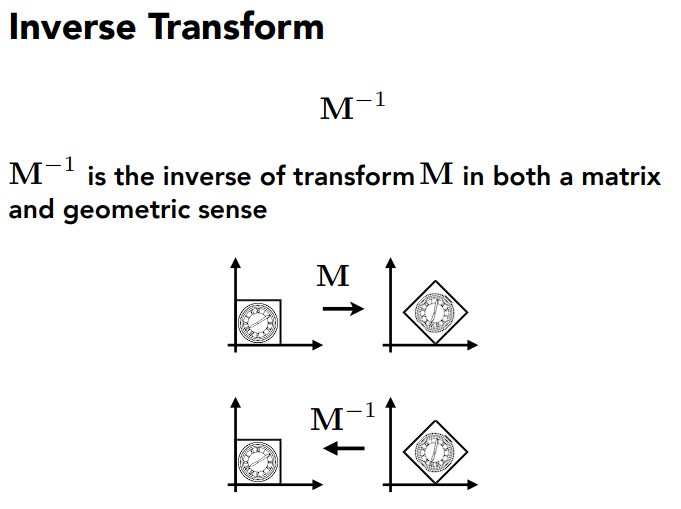
逆变换:
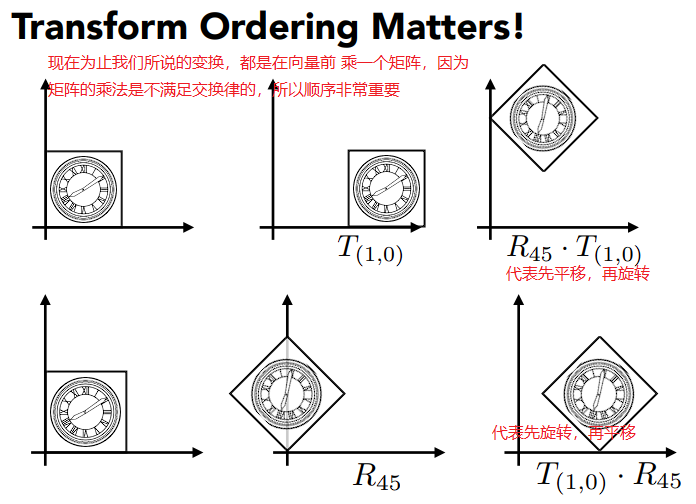
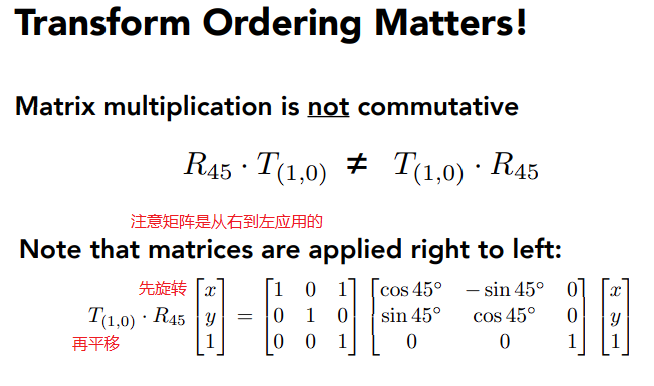
矩阵变换的顺序应该从右到左写
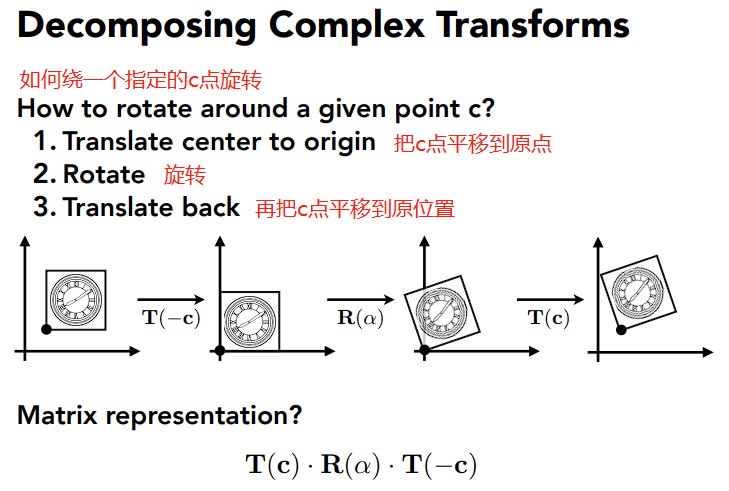
变换的分解:
(旋转默认是以原点为中心,逆时针旋转)
(下节课开个头)
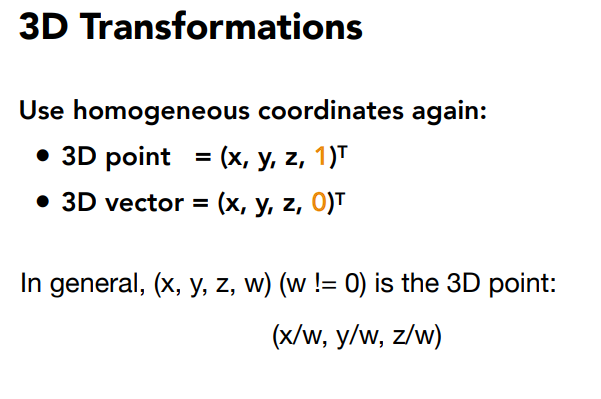
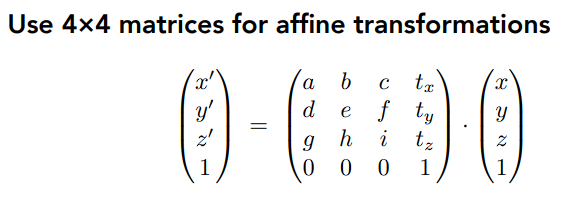
三维空间的变换
三维空间的齐次坐标
(〃>_<;〃)(〃>_<;〃)(〃>_<;〃)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号