
OpenCV实战(2)——检测及分割图像的目标区域
如果需要处理的原图及代码,请移步小编的GitHub地址
传送门:请点击我
如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice
下面来实战一个使用opencv检测及其分割图像的目标区域的例子。
注意:现在OpenCV for Python 就是通过Numpy 进行绑定的。所以在使用时必须掌握一些Numpy的相关知识!图像就是一个矩阵,在OpenCV for Python 中,图像就是Numpy中的数组!
1,图像的载入,显示和保存
如果读取图像,只需要imread即可。
import cv2 # 获取图片 img_path = r'1.jpg' img = cv2.imread(img_path)
OpenCV目前支持读取bmp,jpg,png,tiff等常用格式。
我们还可以查看图像的一些基本属性:
print(img) print(img.dtype) print(img.shape)
接着创建一个窗口
cv2.namedWindow("Image")
然后在窗口中显示图像
cv2.imshow('Image', img)
最后还要添加一句:
cv2.waitKey(0)
如果不添加最后一句,在IDLE中执行窗口直接无响应。在命令行中执行的话,则是一闪而过。
保存图像很简单,直接cv.imwrite即可。
cv2.imwrite(save_path, crop_img)
第一个参数是保存的路径及文件名,第二个是图像矩阵。其中,imwrite()有个可选的第三个参数,如下:
cv2.imwrite("cat.jpg", img,[int(cv2.IMWRITE_JPEG_QUALITY), 5])
第三个参数针对特定的格式: 对于JPEG,其表示的是图像的质量,用0-100的整数表示,默认为95。 注意,cv2.IMWRITE_JPEG_QUALITY类型为Long,必须转换成int。下面是以不同质量存储的两幅图:

对于PNG,第三个参数表示的是压缩级别。cv2.IMWRITE_PNG_COMPRESSION,从0到9,压缩级别越高,图像尺寸越小。默认级别为3:
cv2.imwrite("./cat.png", img, [int(cv2.IMWRITE_PNG_COMPRESSION), 0])
cv2.imwrite("./cat2.png", img, [int(cv2.IMWRITE_PNG_COMPRESSION), 9])
保存的图像尺寸如下:

还有一种支持的图像,一般不常用。
完整的程序为:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import cv2
# 获取图片
img_path = r'worm.jpg'
img = cv2.imread(img_path)
cv2.namedWindow("Image")
cv2.imshow('Image', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
最后释放窗口是个好习惯!,查看图片效果如下:

2,转换灰度并去噪声
我们可以得到两张图片,第一张是灰度图,第二章是去噪之后的。去噪有很多种方法,均值滤波法,高斯滤波法,中值滤波器,双边滤波器等。这里展示灰度化,高斯去噪的代码:
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) blurred = cv2.GaussianBlur(gray, (9, 9),0)
下图展示效果,(这里取高斯是因为高斯去噪效果是最好的)
3,提取图像的梯度
用Sobel算子计算x,y方向上的梯度,之后在x方向上 减去 y方向上的梯度,通过这个操作,会留下具有高水平梯度和低垂直梯度的图像区域。
代码入下:
# 提取图像的梯度 gradX = cv2.Sobel(gray, ddepth=cv2.CV_32F, dx=1, dy=0) gradY = cv2.Sobel(gray, ddepth=cv2.CV_32F, dx=0, dy=1) gradient = cv2.subtract(gradX, gradY) gradient = cv2.convertScaleAbs(gradient)
此时我们会得到如下的图像:
4,继续去噪声
考虑到图像的孔隙,首先使用低通滤波器平滑图像,这将有助于平滑图像中的高频噪声。低通滤波器的目的是降低图像的变化率。
如果将每个像素替换为该图像周围像素的均值,这样就可以平滑并替代那些强度变化明显的区域。
对模糊图像二值化,顾名思义就是把图像数值以某一边界分成两种数值,梯度图像中不大于90的任何像素都设置为0(黑色)。否则,像素设置为255(白色):
blurred = cv2.GaussianBlur(gradient, (9, 9), 0) (_, thresh) = cv2.threshold(blurred, 90, 255, cv2.THRESH_BINARY)
此时效果如下:
其实就算手动分割,我们也是需要找到一个边界,可以看出轮廓出来了,但是我们最终要的是整个轮廓,所以内部小区域就不要了。
5,图像形态学
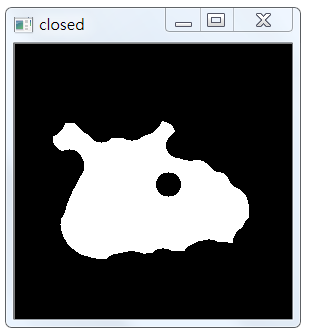
在上图中我们看到虫子身体区域有很多黑色的空余,我们要用白色填充这些空余,使得后面的程序更冗余识别虫子的区域,这需要一些形态学方面的操作。
在这里我们选取ELLIPSE核,采用CLOSE操作。
# 图像形态学 kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (25, 25)) closed = cv2.morphologyEx(thresh, cv2.MORPH_CLOSE, kernel)
此时,效果如下:
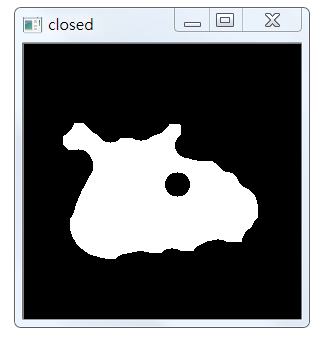
6,细节刻画
从上图我们可以发现和原图对比,发现有细节丢失,这会干扰之后的昆虫轮廓的检测,要把它们扩充,分别执行4次形态学腐蚀与膨胀,代码如下:
# 细节刻画,分别执行四次形态学腐蚀与膨胀 closed = cv2.erode(closed, None, iterations=4) closed = cv2.dilate(closed, None, iterations=4)
效果如下:
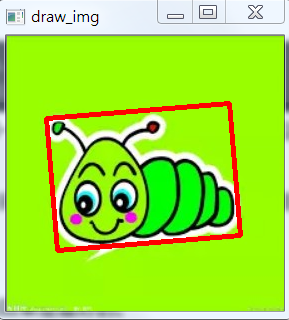
7,找出昆虫区域的轮廓,并画出
此时用 cv2.findContours() 函数如下:
(cnts, _) = cv2.findContours( 参数一: 二值化图像 closed.copy(), 参数二:轮廓类型 #表示只检测外轮廓 # cv2.RETR_EXTERNAL, #建立两个等级的轮廓,上一层是边界 # cv2.RETR_CCOMP, #检测的轮廓不建立等级关系 # cv2.RETR_LIST, #建立一个等级树结构的轮廓 # cv2.RETR_TREE, #存储所有的轮廓点,相邻的两个点的像素位置差不超过1 # cv2.CHAIN_APPROX_NONE, 参数三:处理近似方法 #例如一个矩形轮廓只需4个点来保存轮廓信息 # cv2.CHAIN_APPROX_SIMPLE, # cv2.CHAIN_APPROX_TC89_L1, # cv2.CHAIN_APPROX_TC89_KCOS )
第一个参数是要检索的图片,必须是二值图,即黑白的(不是灰度图)。
# 这里opencv3返回的是三个参数
(cnts, _) = cv2.findContours(
# 参数一:二值化图像
closed.copy(),
# 参数二:轮廓类型
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE
)
c = sorted(cnts, key=cv2.contourArea, reverse=True)[0]
rect = cv2.minAreaRect(c)
box = np.int0(cv2.boxPoints(rect))
draw_img = cv2.drawContours(img.copy(), [box], -1, (0, 0, 255), 3)
cv2.imshow("draw_img", draw_img)
此时,会得到:
8,裁剪
图像的裁剪最简单的方式就是获取图像数组的切片,如下:
img_crop = img[100:300,100:300]
cv2.imshow("img_crop", img_crop)
key = cv2.waitKey()
if key == 27:
cv2.destroyAllWindows()
当然,这里我们直接找到四个点,切出来就OK.
其实,box里保存的是绿色矩阵区域四个顶点的坐标。我们按照下图所示裁剪昆虫图像。

方法是找到四个顶点的x,y坐标的最大最小值。新图像的高等于 max(Y) - min(Y),宽等于 max(X) - min(X)。
Xs = [i[0] for i in box]
Ys = [i[1] for i in box]
x1 = min(Xs)
x2 = max(Xs)
y1 = min(Ys)
y2 = max(Ys)
hight = y2 - y1
width = x2 - x1
crop_img= img[y1:y1+hight, x1:x1+width]
cv2.imshow('crop_img', crop_img)
9,完整代码
#-*- coding: UTF-8 -*-
import cv2
import numpy as np
def get_image(path):
#获取图片
img=cv2.imread(path)
gray=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
return img, gray
def Gaussian_Blur(gray):
# 高斯去噪
blurred = cv2.GaussianBlur(gray, (9, 9),0)
return blurred
def Sobel_gradient(blurred):
# 索比尔算子来计算x、y方向梯度
gradX = cv2.Sobel(blurred, ddepth=cv2.CV_32F, dx=1, dy=0)
gradY = cv2.Sobel(blurred, ddepth=cv2.CV_32F, dx=0, dy=1)
gradient = cv2.subtract(gradX, gradY)
gradient = cv2.convertScaleAbs(gradient)
return gradX, gradY, gradient
def Thresh_and_blur(gradient):
blurred = cv2.GaussianBlur(gradient, (9, 9),0)
(_, thresh) = cv2.threshold(blurred, 90, 255, cv2.THRESH_BINARY)
return thresh
def image_morphology(thresh):
# 建立一个椭圆核函数
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (25, 25))
# 执行图像形态学, 细节直接查文档,很简单
closed = cv2.morphologyEx(thresh, cv2.MORPH_CLOSE, kernel)
closed = cv2.erode(closed, None, iterations=4)
closed = cv2.dilate(closed, None, iterations=4)
return closed
def findcnts_and_box_point(closed):
# 这里opencv3返回的是三个参数
(_, cnts, _) = cv2.findContours(closed.copy(),
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
c = sorted(cnts, key=cv2.contourArea, reverse=True)[0]
# compute the rotated bounding box of the largest contour
rect = cv2.minAreaRect(c)
box = np.int0(cv2.boxPoints(rect))
return box
def drawcnts_and_cut(original_img, box):
# 因为这个函数有极强的破坏性,所有需要在img.copy()上画
# draw a bounding box arounded the detected barcode and display the image
draw_img = cv2.drawContours(original_img.copy(), [box], -1, (0, 0, 255), 3)
Xs = [i[0] for i in box]
Ys = [i[1] for i in box]
x1 = min(Xs)
x2 = max(Xs)
y1 = min(Ys)
y2 = max(Ys)
hight = y2 - y1
width = x2 - x1
crop_img = original_img[y1:y1+hight, x1:x1+width]
return draw_img, crop_img
def walk():
img_path = r'worm.png'
save_path = r'worm_save.png'
original_img, gray = get_image(img_path)
blurred = Gaussian_Blur(gray)
gradX, gradY, gradient = Sobel_gradient(blurred)
thresh = Thresh_and_blur(gradient)
closed = image_morphology(thresh)
box = findcnts_and_box_point(closed)
draw_img, crop_img = drawcnts_and_cut(original_img,box)
# 暴力一点,把它们都显示出来看看
cv2.imshow('original_img', original_img)
cv2.imshow('blurred', blurred)
cv2.imshow('gradX', gradX)
cv2.imshow('gradY', gradY)
cv2.imshow('final', gradient)
cv2.imshow('thresh', thresh)
cv2.imshow('closed', closed)
cv2.imshow('draw_img', draw_img)
cv2.imshow('crop_img', crop_img)
cv2.waitKey(20171219)
cv2.imwrite(save_path, crop_img)
walk()
附录代码:
# 用来转化图像格式的
img = cv2.cvtColor(src,
COLOR_BGR2HSV # BGR---->HSV
COLOR_HSV2BGR # HSV---->BGR
...)
# For HSV, Hue range is [0,179], Saturation range is [0,255] and Value range is [0,255]
# 返回一个阈值,和二值化图像,第一个阈值是用来otsu方法时候用的
# 不过现在不用了,因为可以通过mahotas直接实现
T = ret = mahotas.threshold(blurred)
ret, thresh_img = cv2.threshold(src, # 一般是灰度图像
num1, # 图像阈值
num2, # 如果大于或者num1, 像素值将会变成 num2
# 最后一个二值化参数
cv2.THRESH_BINARY # 将大于阈值的灰度值设为最大灰度值,小于阈值的值设为0
cv2.THRESH_BINARY_INV # 将大于阈值的灰度值设为0,大于阈值的值设为最大灰度值
cv2.THRESH_TRUNC # 将大于阈值的灰度值设为阈值,小于阈值的值保持不变
cv2.THRESH_TOZERO # 将小于阈值的灰度值设为0,大于阈值的值保持不变
cv2.THRESH_TOZERO_INV # 将大于阈值的灰度值设为0,小于阈值的值保持不变
)
thresh = cv2.AdaptiveThreshold(src,
dst,
maxValue,
# adaptive_method
ADAPTIVE_THRESH_MEAN_C,
ADAPTIVE_THRESH_GAUSSIAN_C,
# thresholdType
THRESH_BINARY,
THRESH_BINARY_INV,
blockSize=3,
param1=5
)
# 一般是在黑色背景中找白色物体,所以原始图像背景最好是黑色
# 在执行找边缘的时候,一般是threshold 或者是canny 边缘检测后进行的。
# warning:此函数会修改原始图像、
# 返回:坐标位置(x,y),
(_, cnts, _) = cv2.findContours(mask.copy(),
# cv2.RETR_EXTERNAL, #表示只检测外轮廓
# cv2.RETR_CCOMP, #建立两个等级的轮廓,上一层是边界
cv2.RETR_LIST, #检测的轮廓不建立等级关系
# cv2.RETR_TREE, #建立一个等级树结构的轮廓
# cv2.CHAIN_APPROX_NONE, #存储所有的轮廓点,相邻的两个点的像素位置差不超过1
cv2.CHAIN_APPROX_SIMPLE, #例如一个矩形轮廓只需4个点来保存轮廓信息
# cv2.CHAIN_APPROX_TC89_L1,
# cv2.CHAIN_APPROX_TC89_KCOS
)
img = cv2.drawContours(src, cnts, whichToDraw(-1), color, line)
img = cv2.imwrite(filename, dst, # 文件路径,和目标图像文件矩阵
# 对于JPEG,其表示的是图像的质量,用0-100的整数表示,默认为95
# 注意,cv2.IMWRITE_JPEG_QUALITY类型为Long,必须转换成int
[int(cv2.IMWRITE_JPEG_QUALITY), 5]
[int(cv2.IMWRITE_JPEG_QUALITY), 95]
# 从0到9,压缩级别越高,图像尺寸越小。默认级别为3
[int(cv2.IMWRITE_PNG_COMPRESSION), 5])
[int(cv2.IMWRITE_PNG_COMPRESSION), 9])
# 如果你不知道用哪个flags,毕竟太多了哪能全记住,直接找找。
寻找某个函数或者变量
events = [i for i in dir(cv2) if 'PNG' in i]
print( events )
寻找某个变量开头的flags
flags = [i for i in dir(cv2) if i.startswith('COLOR_')]
print flags
批量读取文件名字
import os
filename_rgb = r'C:\Users\aixin\Desktop\all_my_learning\colony\20170629'
for filename in os.listdir(filename_rgb): #listdir的参数是文件夹的路径
print (filename)
参考文献:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号