(RoboMaster)【三维视觉基础】
【三维视觉基础】
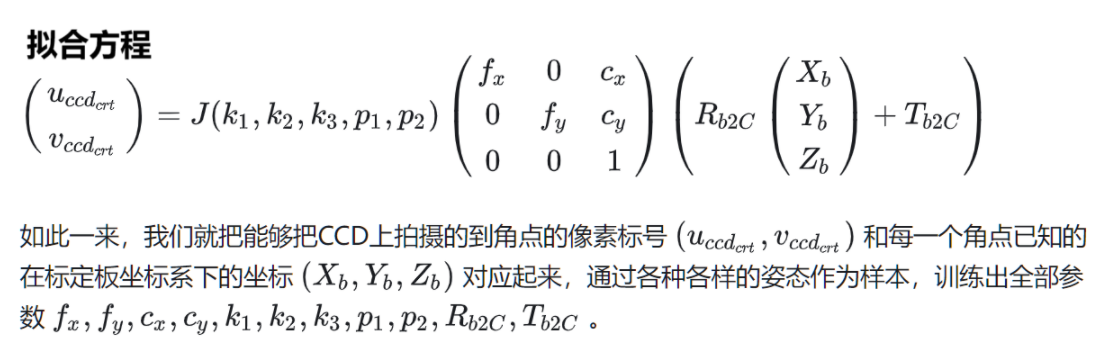
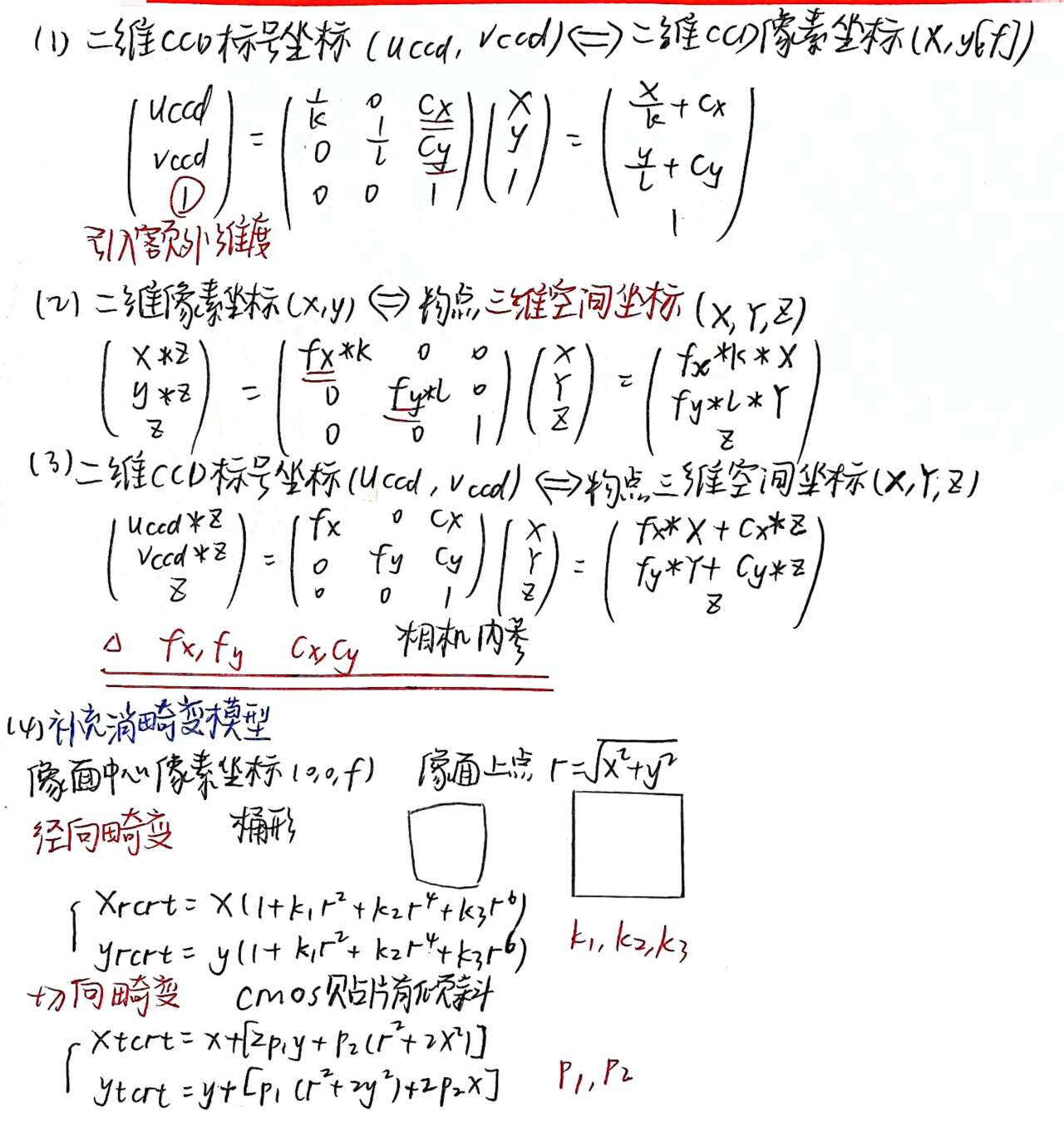
相机标定
https://zhuanlan.zhihu.com/p/30813733
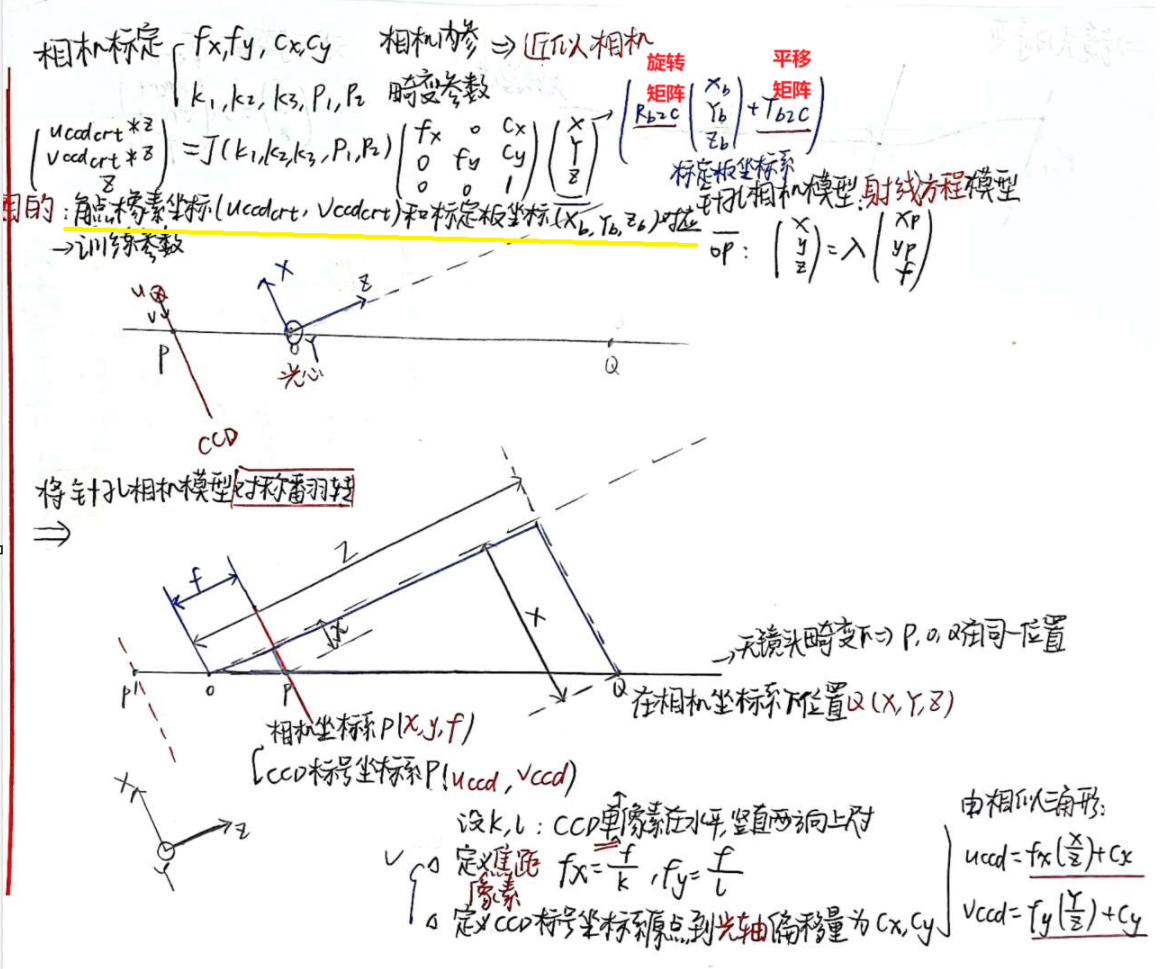
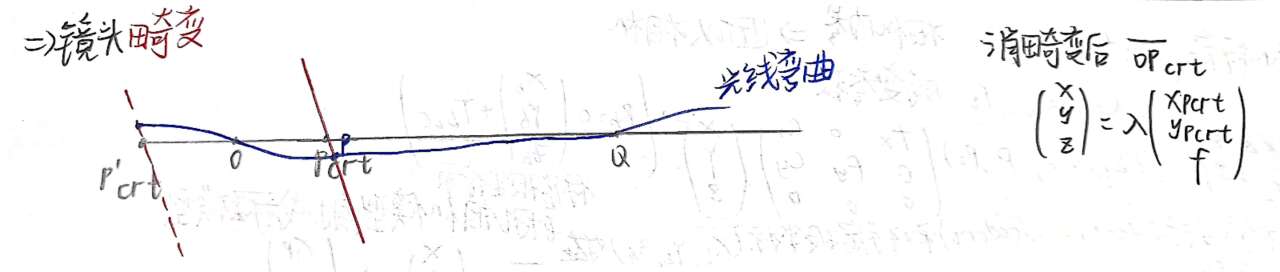
公式
重投影误差
检验相机标定结果
一般小于0.1可接受
定义
真实物体投到相机的像素点与计算得到像素点的距离

PnP
反向投影以得到深度信息
本质上是反解[R t]
方法
添加等式约束:真实位置点-像平面上投影点
需要6组匹配点,12个方程
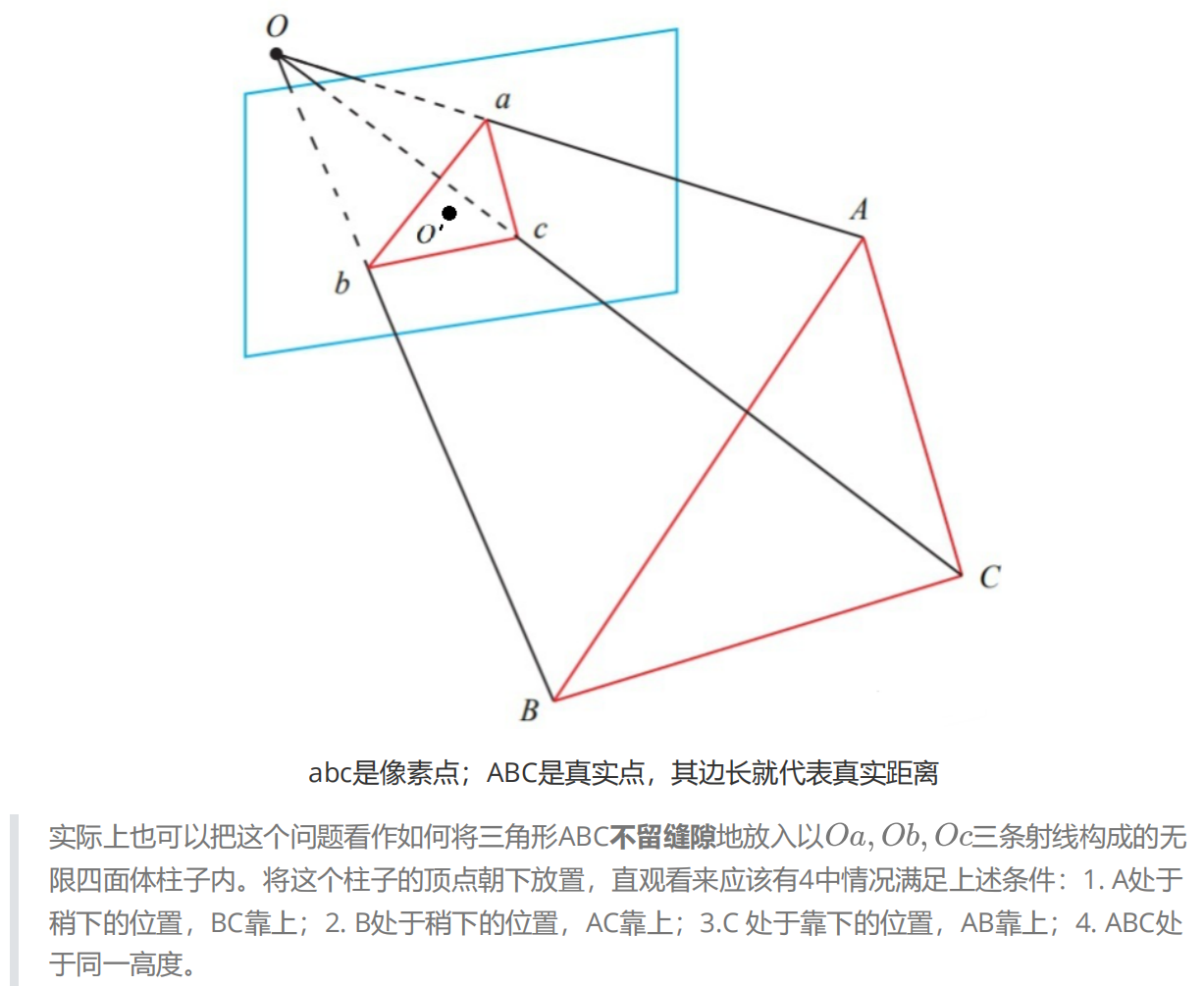
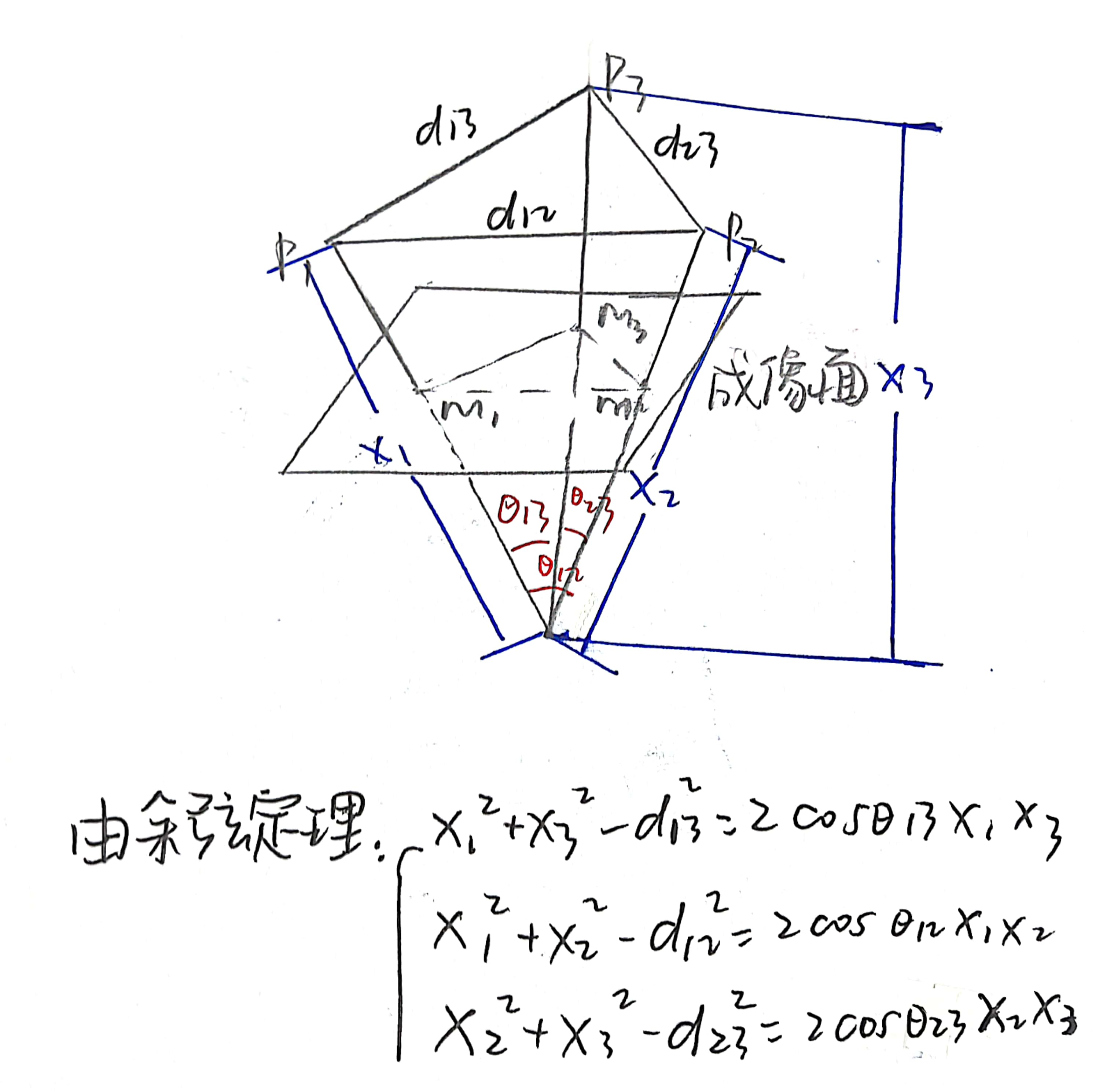
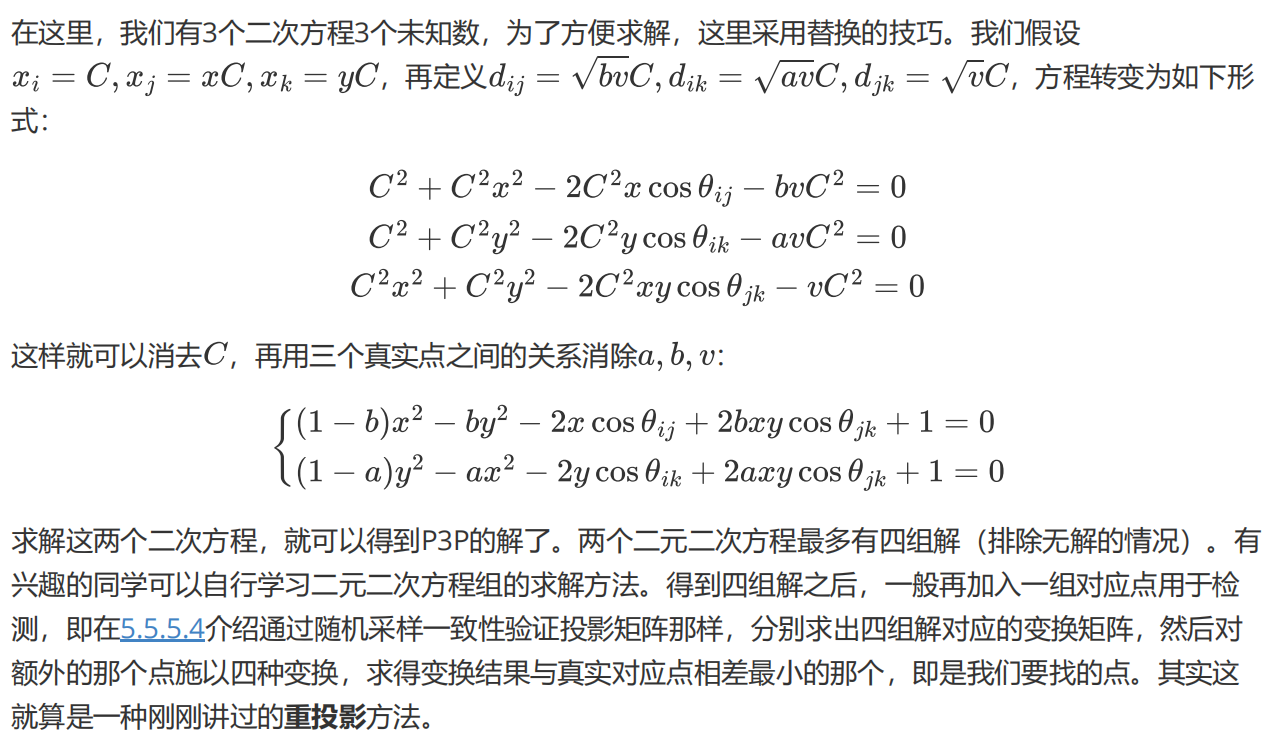
理解PnP解法
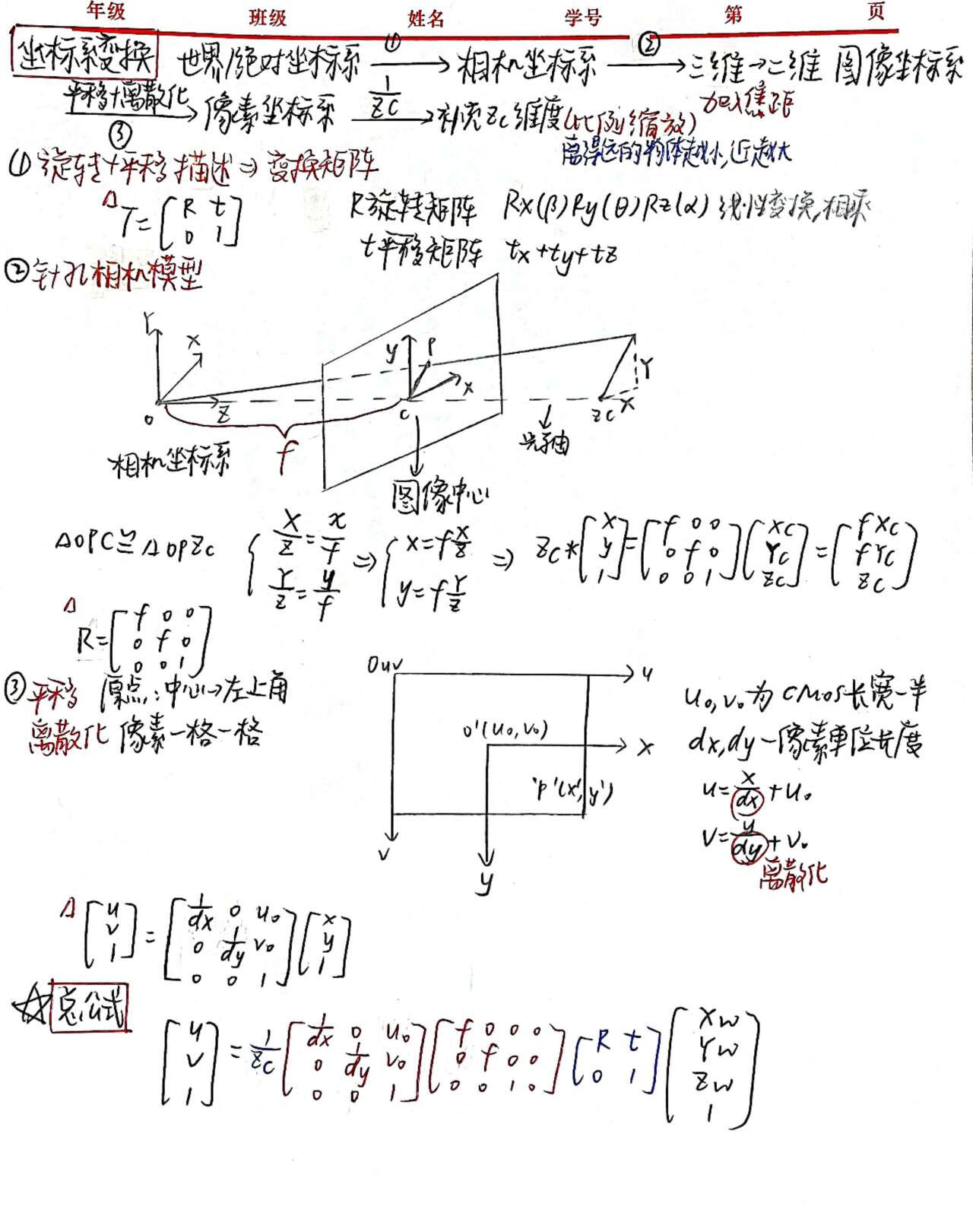
公式推导
坐标系变换

https://zhuanlan.zhihu.com/p/30813733
检验相机标定结果
一般小于0.1可接受
真实物体投到相机的像素点与计算得到像素点的距离
反向投影以得到深度信息
本质上是反解[R t]
添加等式约束:真实位置点-像平面上投影点
需要6组匹配点,12个方程

 浙公网安备 33010602011771号
浙公网安备 33010602011771号