【卡尔曼滤波器】
【卡尔曼滤波】
【重要!】五个公式

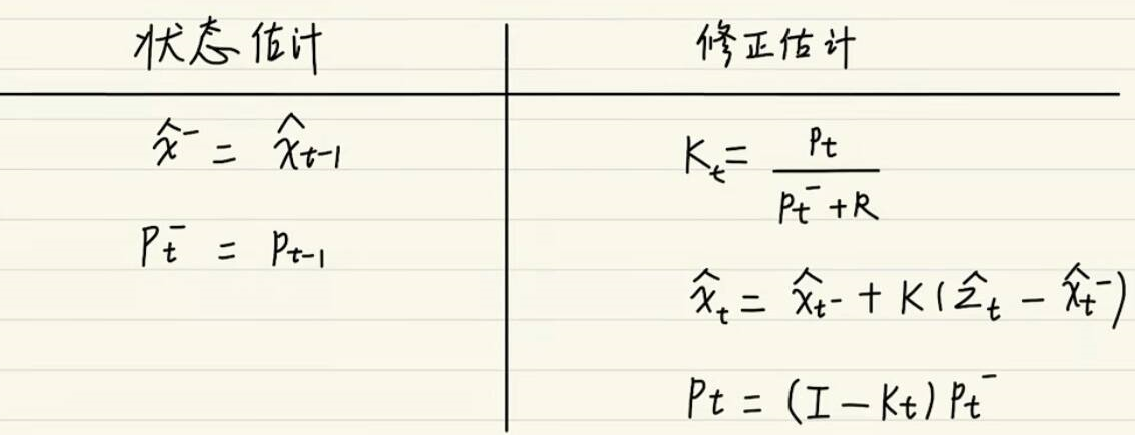
【重要!】公式总结

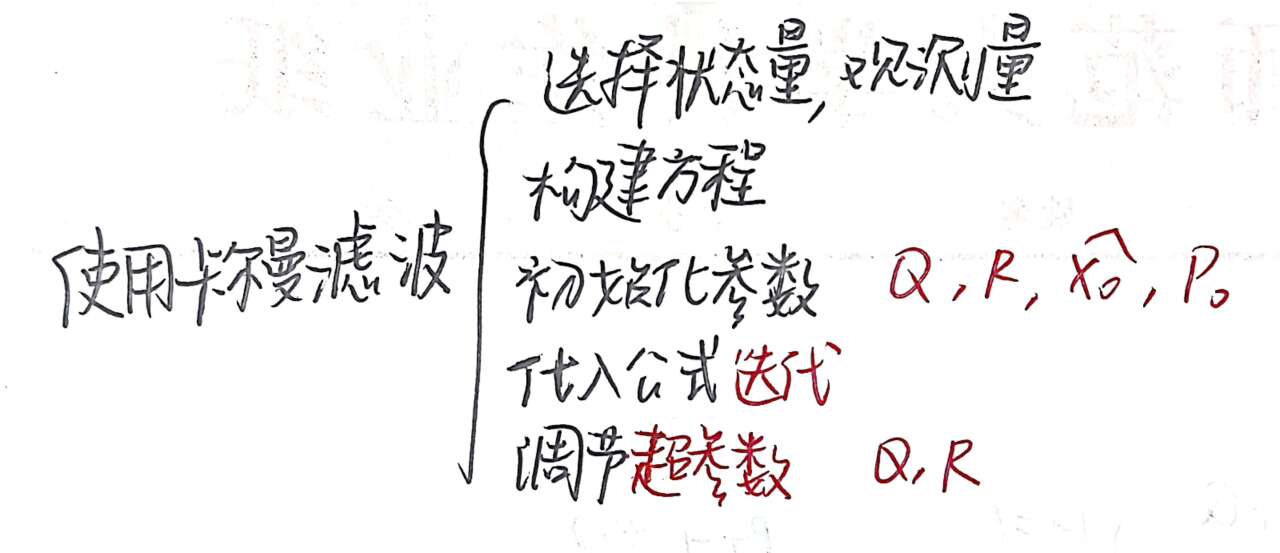
【重要!】卡尔曼模型使用步骤
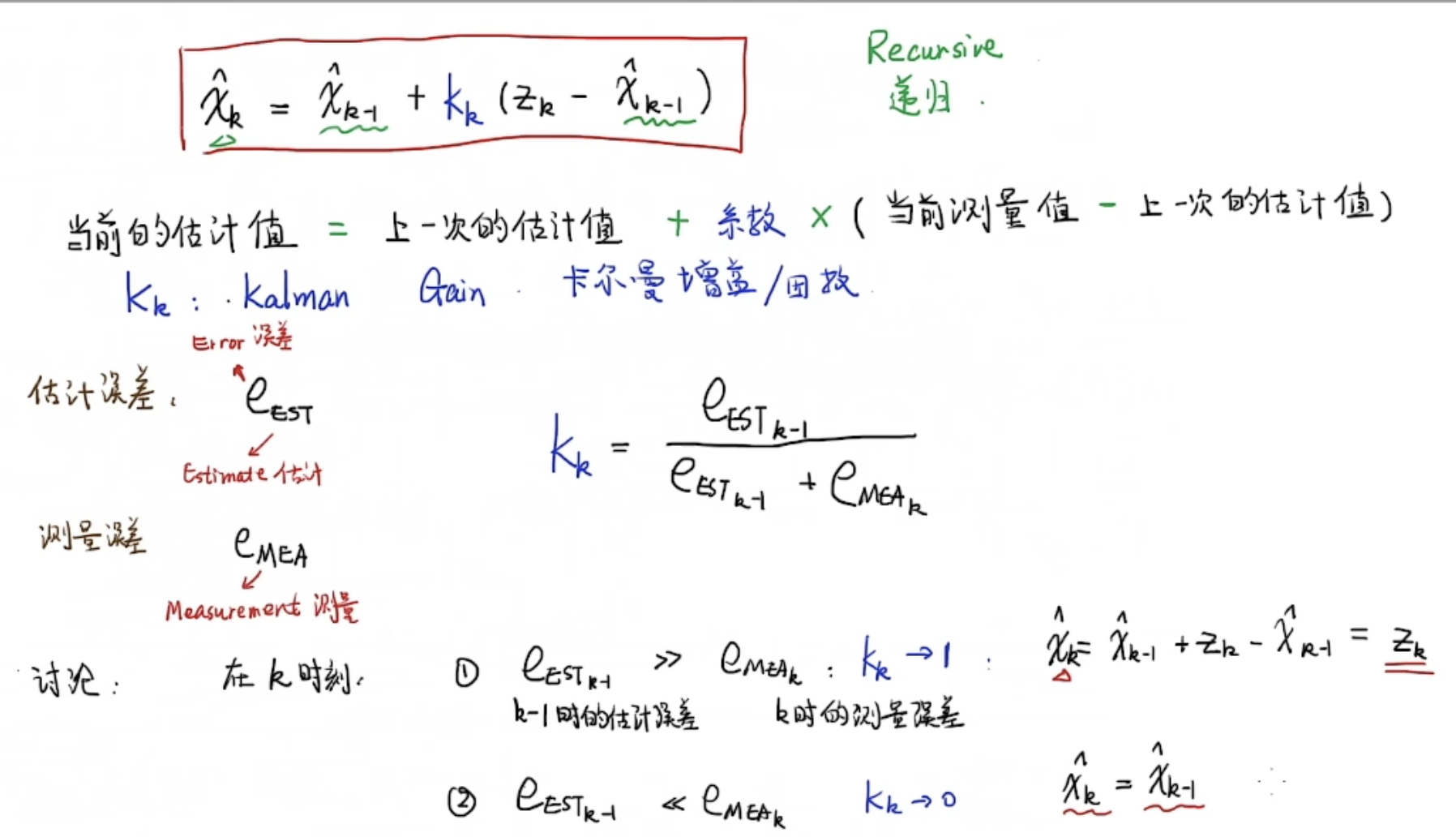
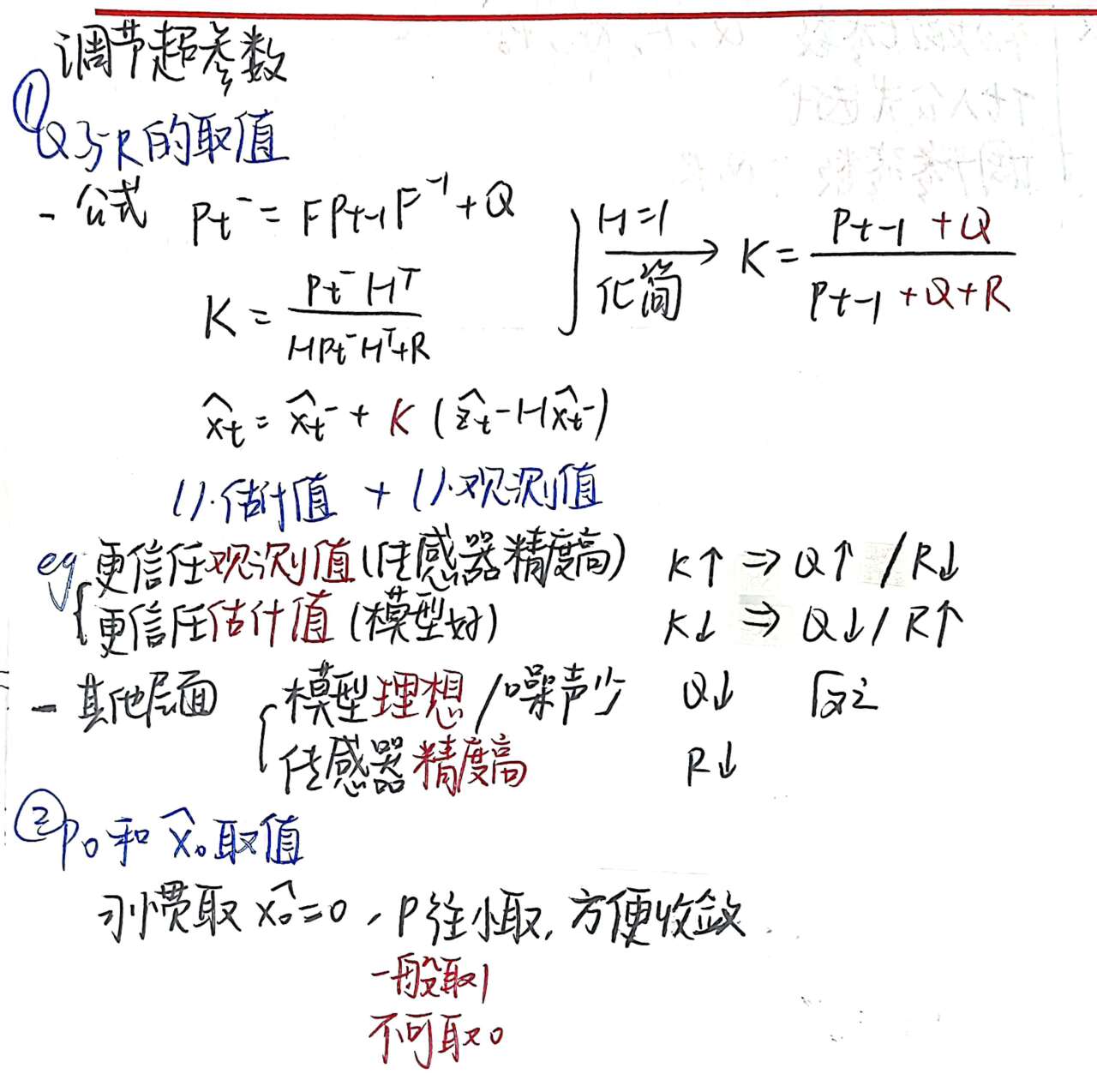
Q 更信任观测值
R 更信任估计值
若更信任观测值:曲线毛刺会多
若更信任估计值:响应速度会慢
—————————————以下为看课笔记—————————————
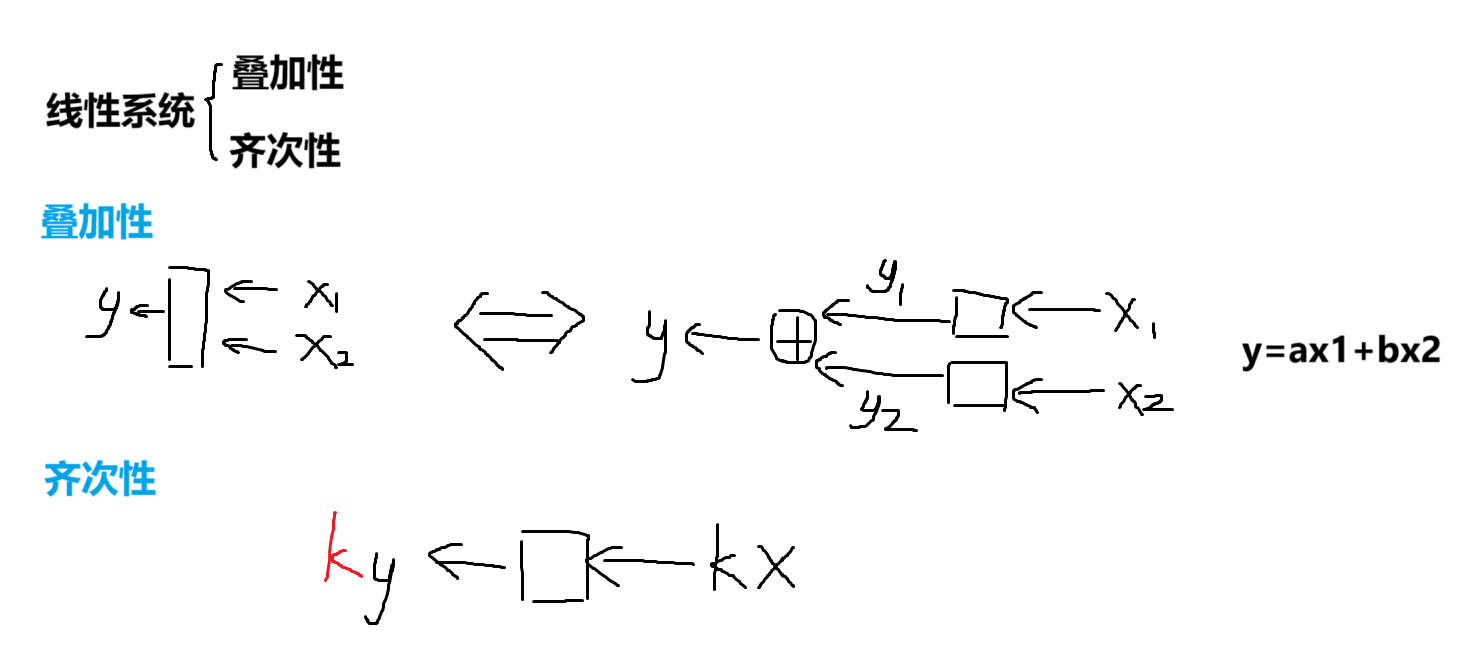
适用系统:线性高斯系统
线性
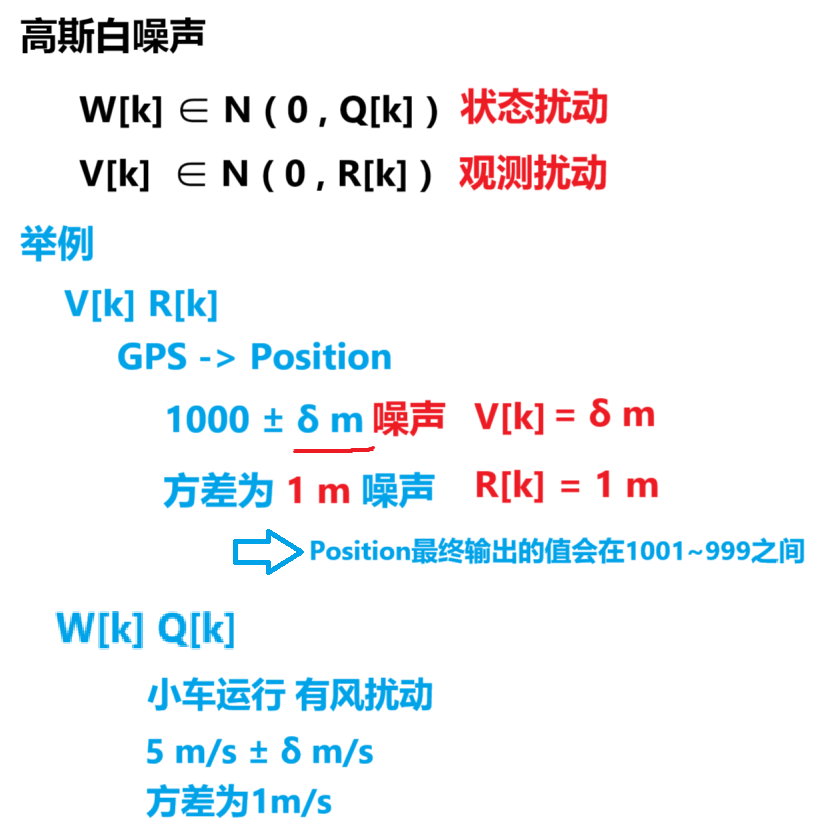
高斯
噪声满足正态分布
宏观意义:滤波即加权
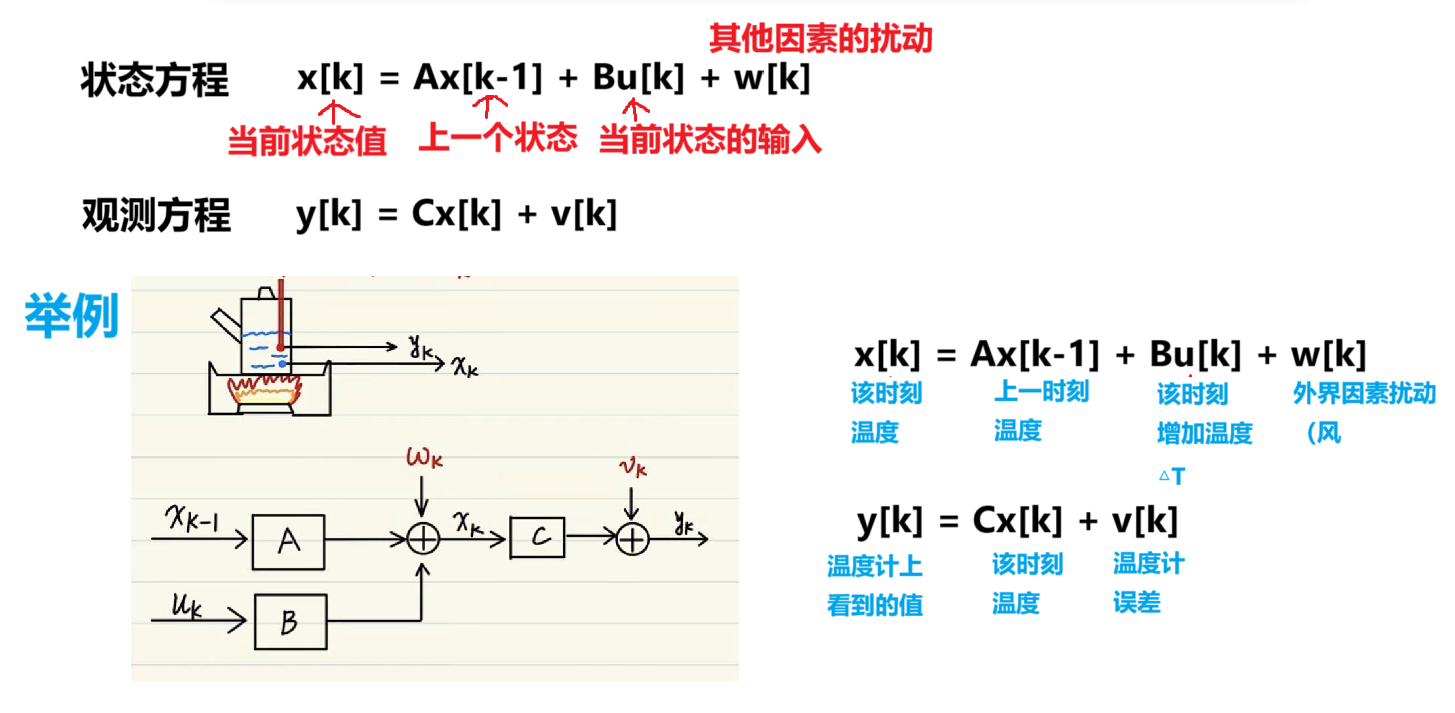
状态空间表达式
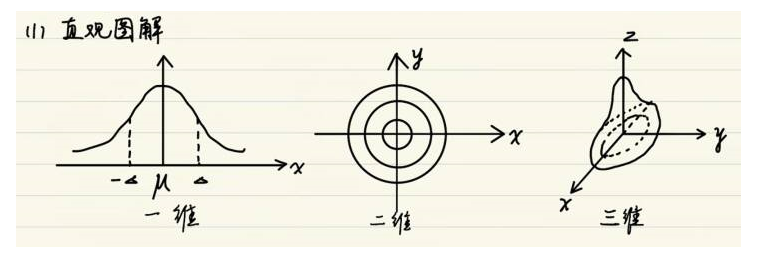
高斯分布
参数分析
参数
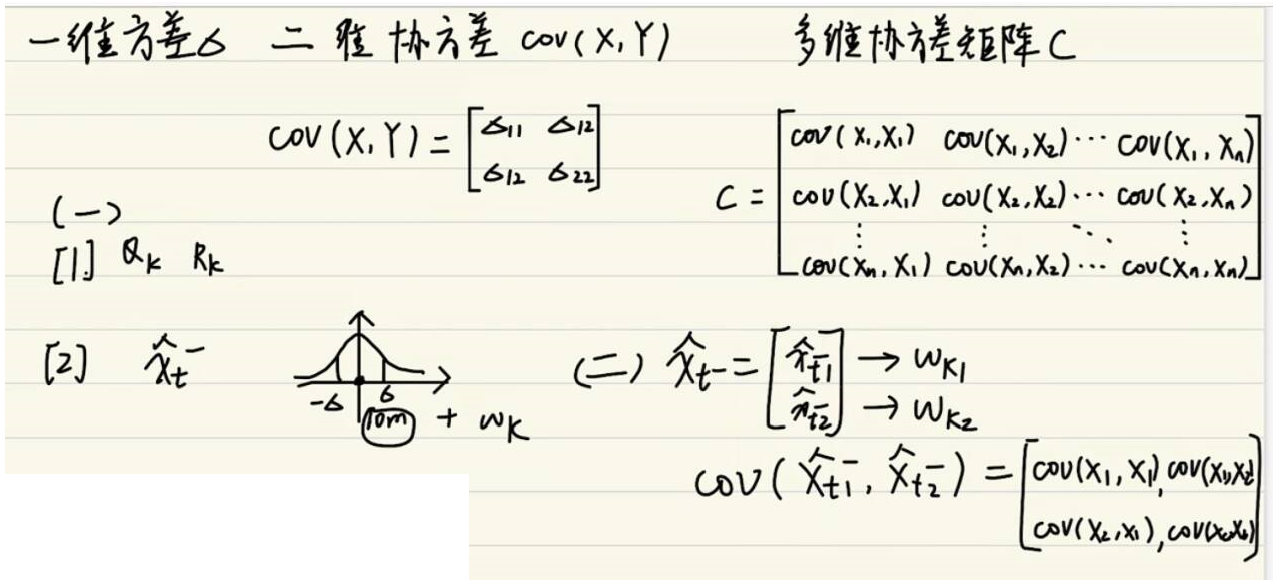
方差 (没看懂QAQ)
超参数:靠调出来
卡尔曼滤波主要调
Q 过程噪声方差
R 观测噪声方差
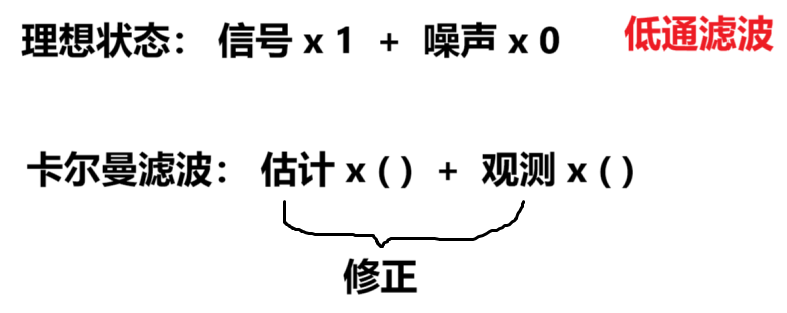
直观理解
卡尔曼公式理解
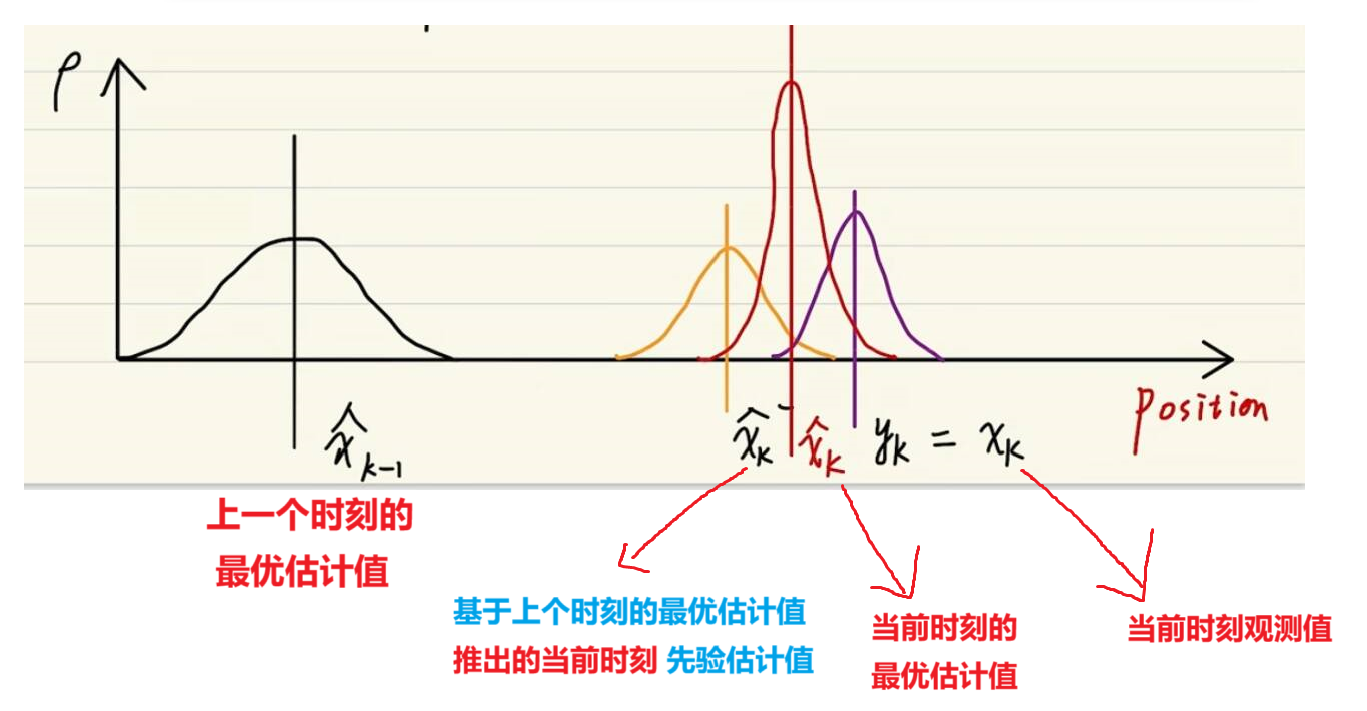
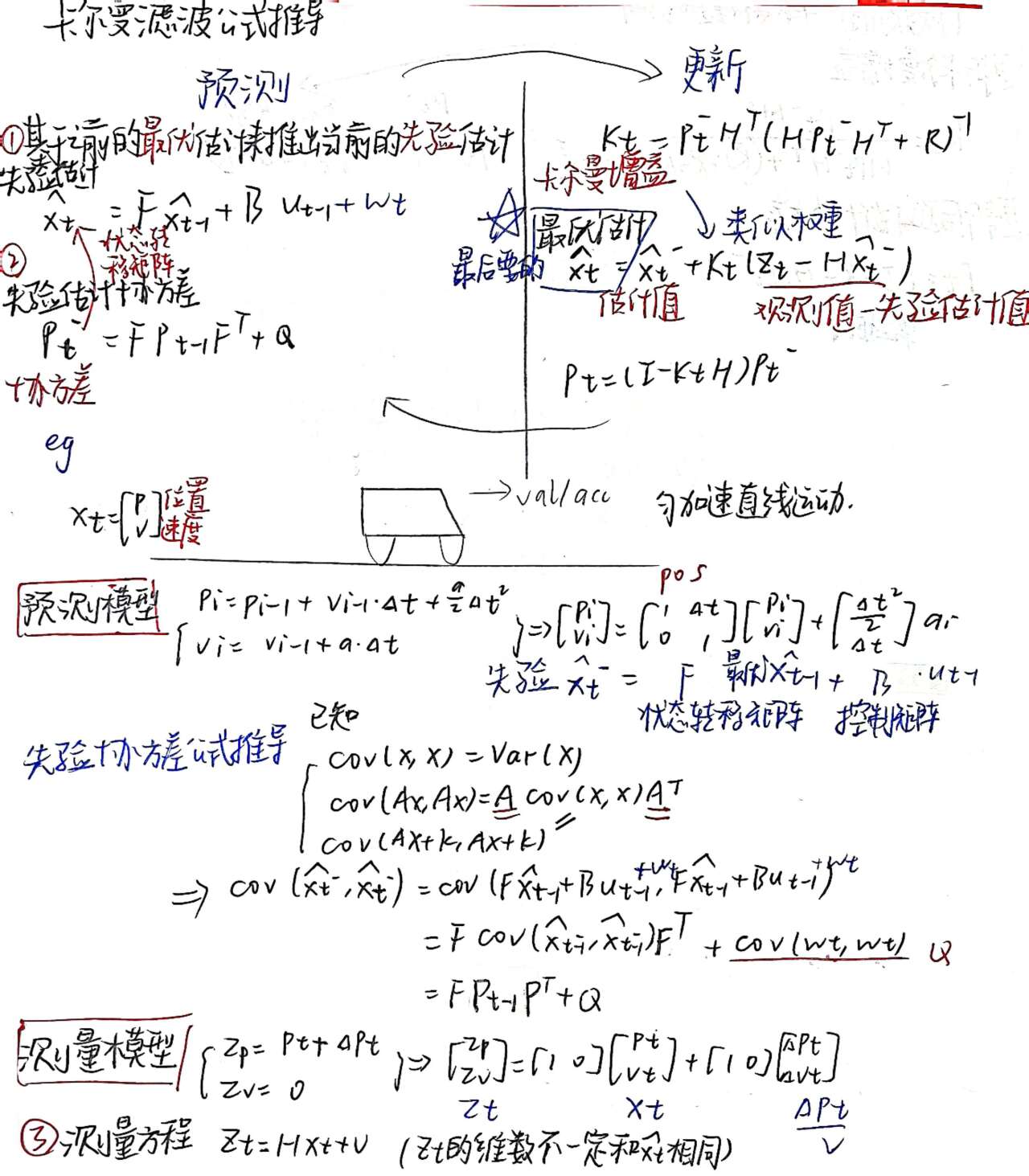
宏观过程
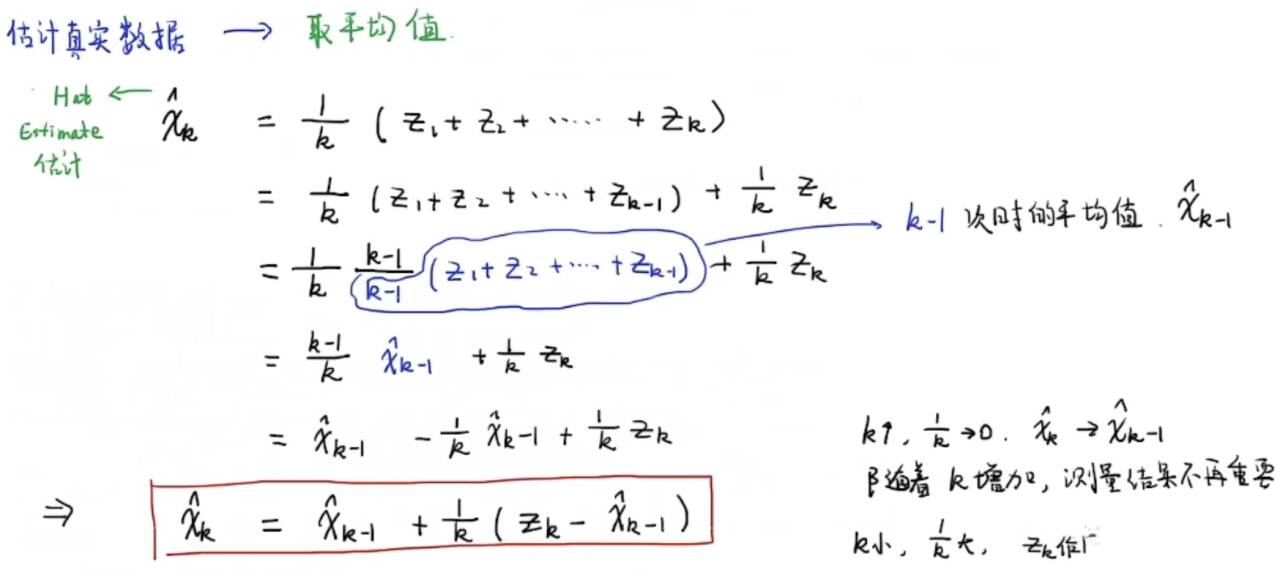
使用上一次的最优结果预测当前的值
同时使用观测值修正当前值,得到最优结果
公式推导(看看就好)
前置知识

最优估计和卡尔曼增益
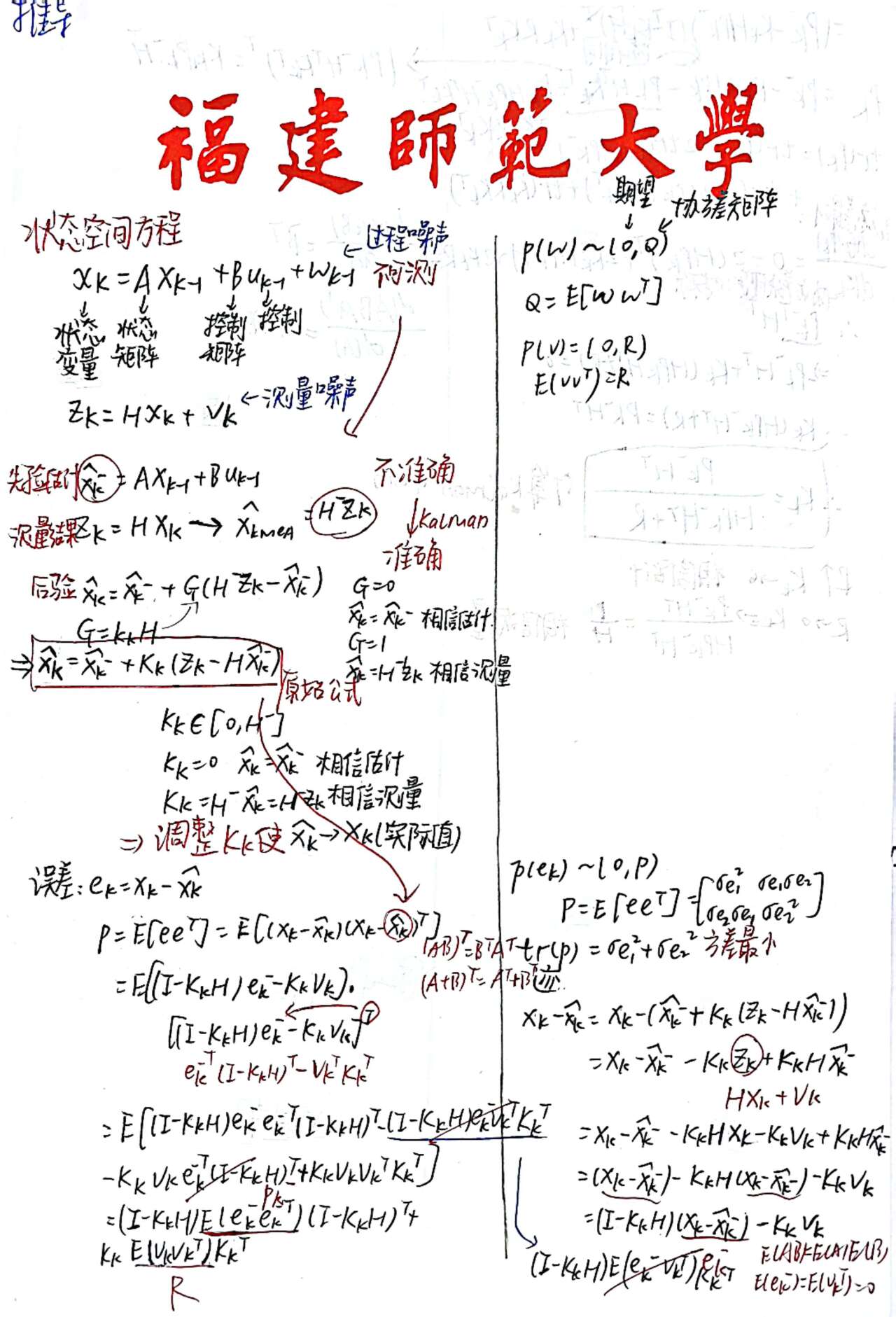
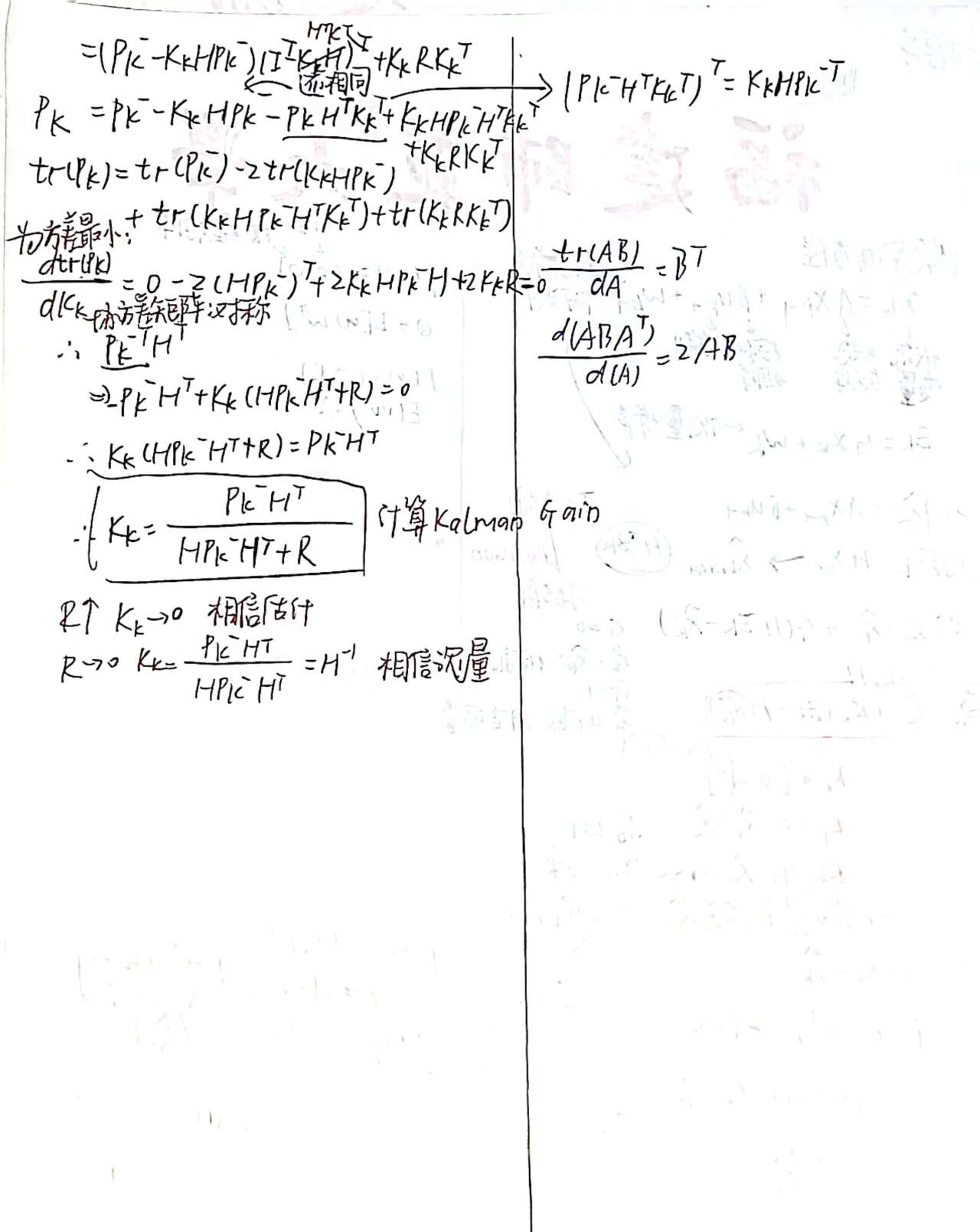
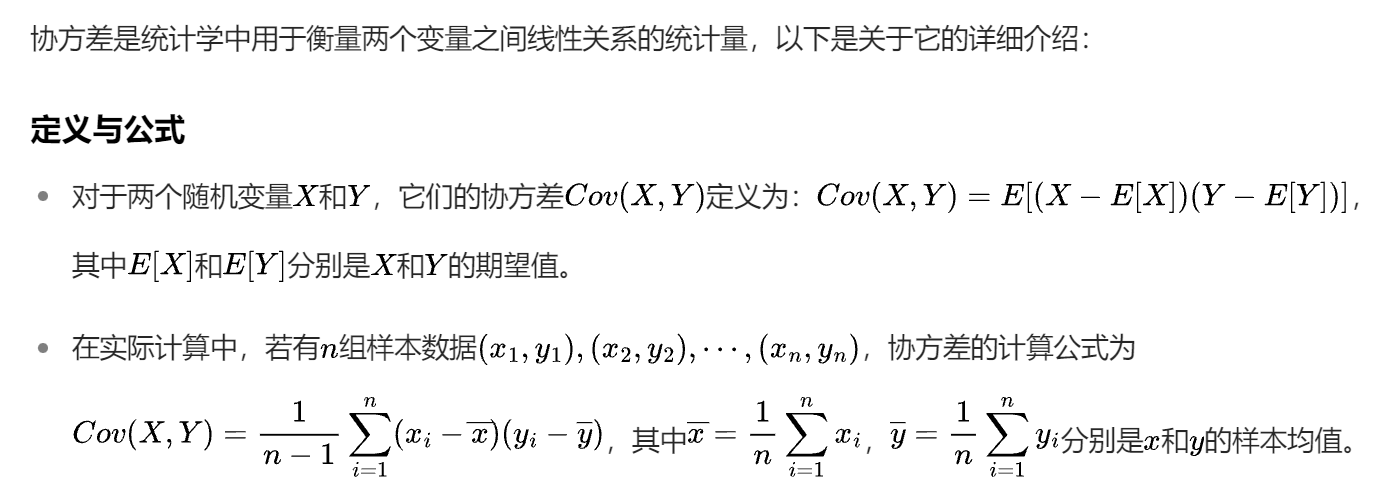
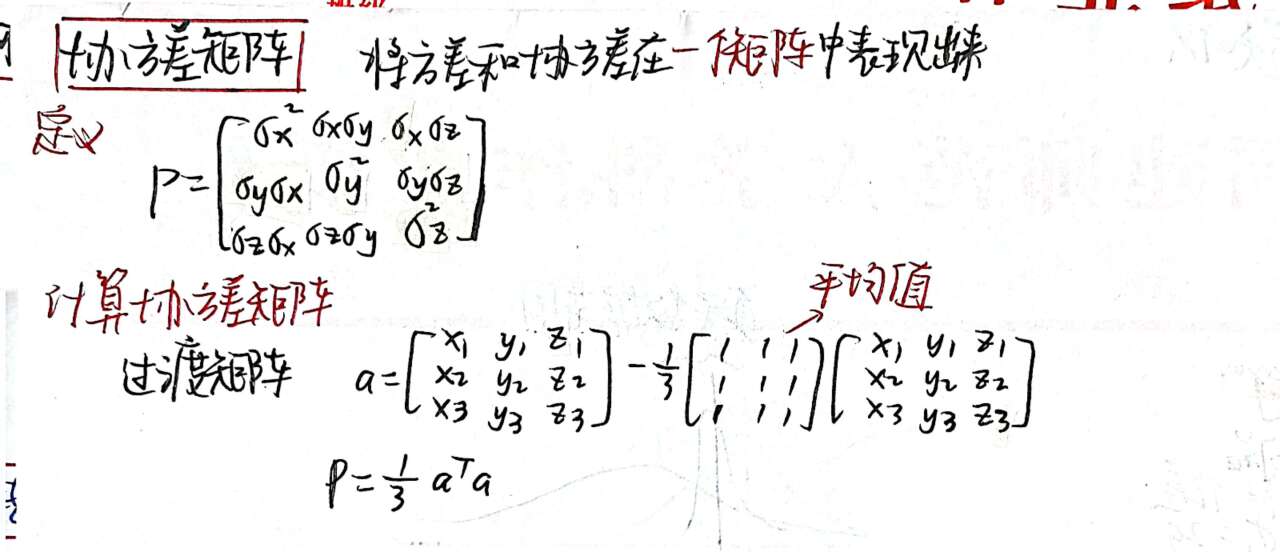
误差协方差

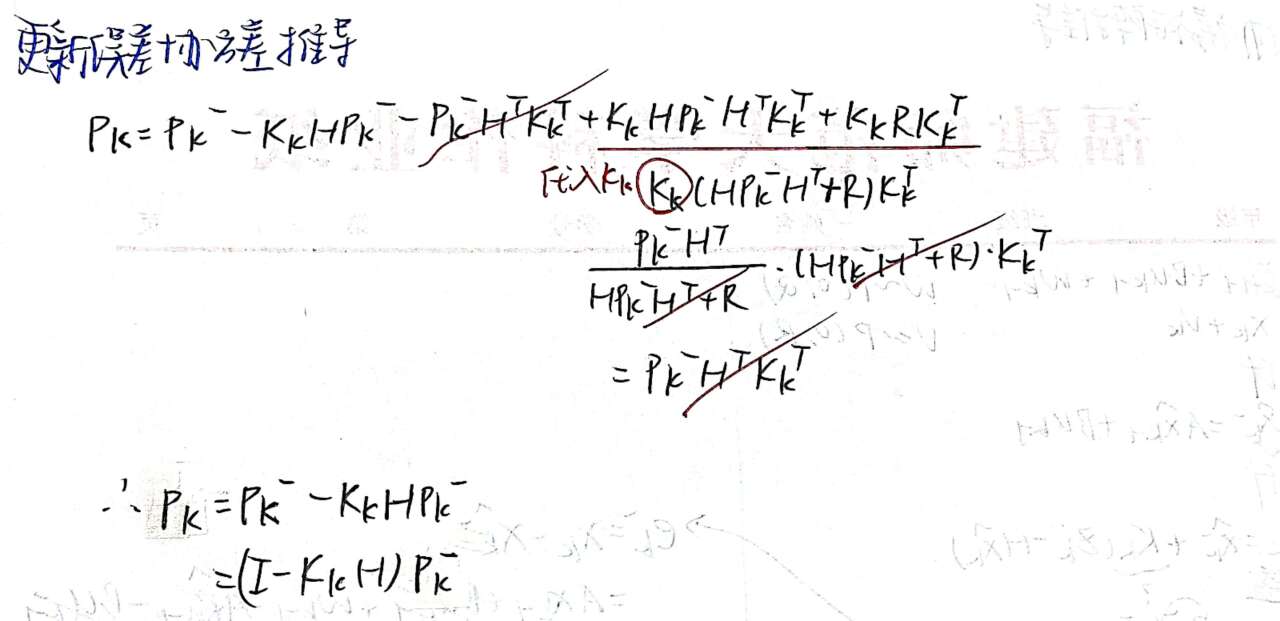
公式介绍(看看就好)

调节超参数
(1)Q和R
(2)P0和x0
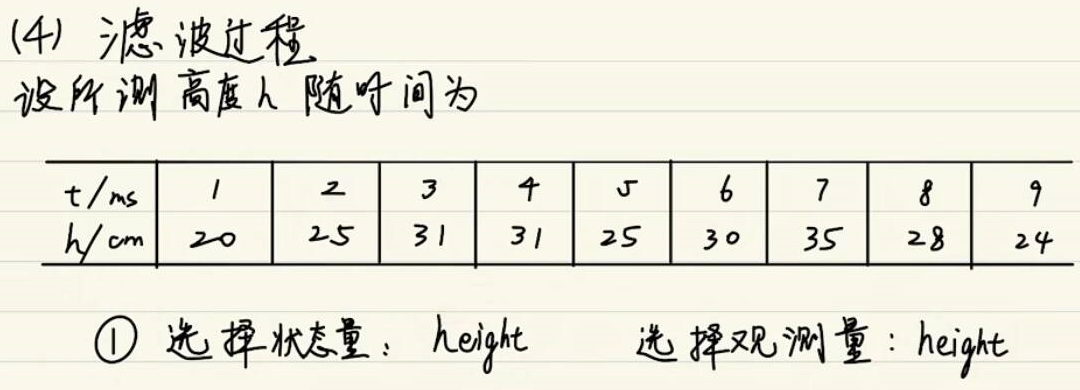
模型举例
基于高度的视觉跟随


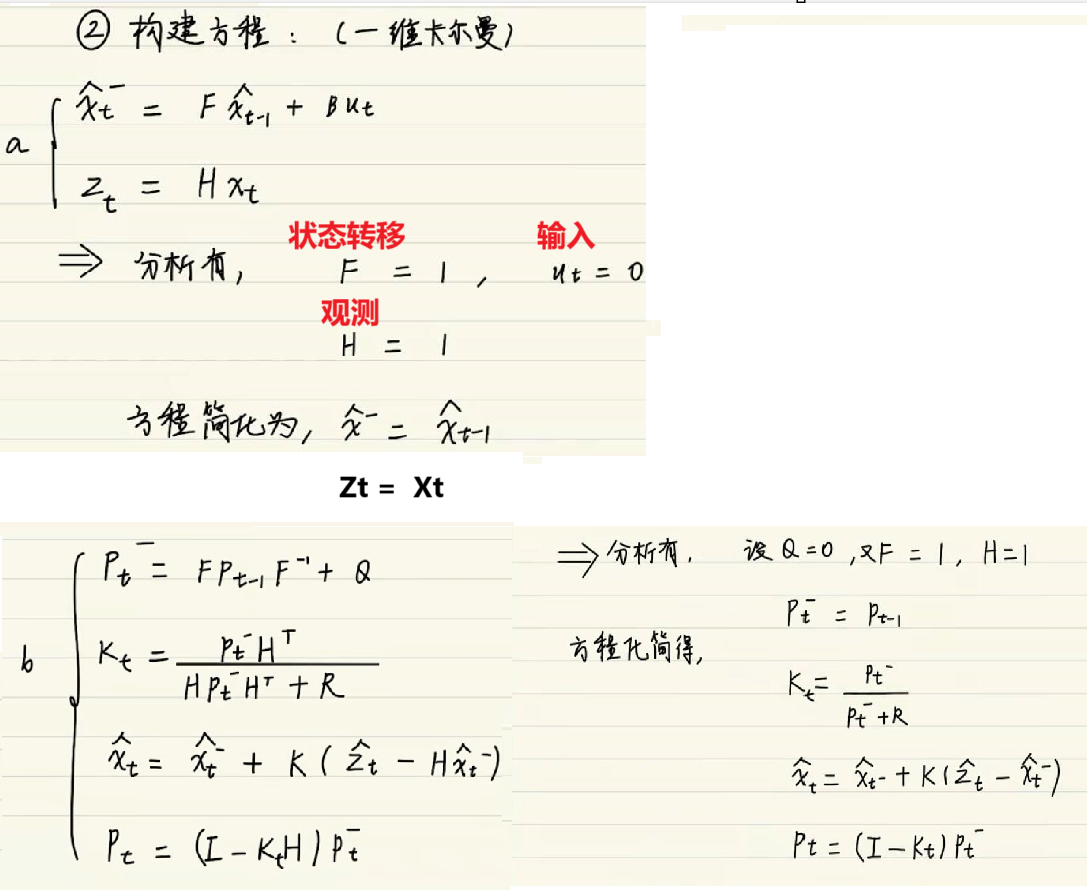
->卡尔曼公式



 浙公网安备 33010602011771号
浙公网安备 33010602011771号