【DDS中间件】
【DDS中间件】
DDS-Data Distribution Service 数据分发服务
切换DDS
Fast DDS
$ sudo apt install ros-$ROS_DISTRO-rmw-fastrtps-cpp
$ export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
Cyclone DDS
$ sudo apt install ros-$ROS_DISTRO-rmw-cyclonedds-cpp
$ export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
配置局域网通信
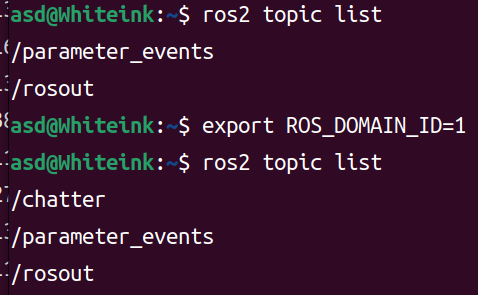
域ID
※所有ROS2节点默认使用域ID0
※域ID具有隔离性
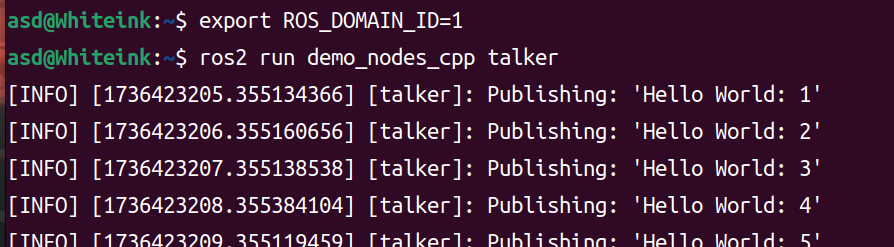
//设置域ID
export ROS_DOMAIN_ID=1
//限制ROS2只进行本机通信
export ROS_LOCALHOST_ONLY=1
调整DDS配置
ROS2通过中间件抽象层来兼容不同厂家的DDS
->直接配置DDS
示例
【限制该话题订阅者数量为1】
【topic_sub_limit.xml】
<?xml version="1.0" encoding="UTF-8" ?>
<profiles xmlns="http:://www.eprosima.com/XMLSchemas/fastRTPS_Profiles">
<!-- 默认发布者配置 -->
<publisher profile_name="default_publisher" is_default_profile="true">
<historyMemoryPolicy>DYNAMIC</historyMemoryPolicy>
</publisher>
<!-- 默认订阅者配置 -->
<subscriber profile_name="default_subscriber" is_default_profile="true">
<historyMemoryPolicy>DYNAMIC</historyMemoryPolicy>
</subscriber>
<!-- 话题chatter的发布者配置 -->
<publisher profile_name="/chatter">
<historyMemoryPolicy>DYNAMIC</historyMemoryPolicy>
<matchedSubscribersAllocation>
<initial>0</initial>
<maximum>1</maximum>
<increment>1</increment>
</matchedSubscribersAllocation>
</publisher>
</profiles>
//使用环境变量指定配置文件
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
export RMW_FASTRTPS_USE_QOS_FROM_XML=1
export FASTRTPS_DEFAULT_PROFILES_FILE=./topic_sub_limit.xml
ros2 run demo_nodes_cpp talker
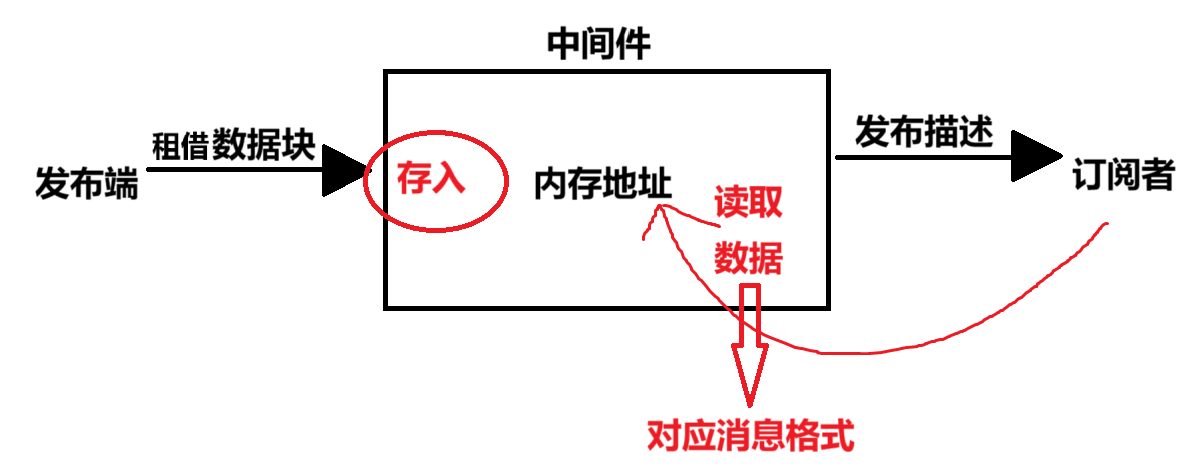
使用DDS共享内存
对于不在同一进程,但在同一主机的节点->通过共享内存的方式实现零复制通信
->需要额外通信接口
※注意:ROS2共享内存通信仅支持普通旧数据类型->常用不定长字符串类型std_msgs/msg/String无法使用
#include"rclcpp/loaned_message.hpp"
#include"rclcpp/rclcpp.hpp"
#include"std_msgs/msg/int32.hpp"
class LoanedMessagePublisher : public rclcpp::Node{
public:
LoanedMessagePublisher() : Node("loaned_messagw_publisher"){
publisher_=this->create_publisher<std_msgs::msg::Int32>("loaned_int_topic",10);
timer_=this->create_wall_timer(std::chrono::seconds(1),[&](){
auto message=publisher_->borrow_loaned_message();//1.租借消息
message.get().data=count_++;//2.放入数据
RCLCPP_INFO(this->get_logger(),"发布数据:%d",message.get().data);
publisher_->publish(std::move(message));//发布数据
});
}
private:
rclcpp::Publisher<std_msgs::msg::Int32>::SharedPtr publisher_;
rclcpp::TimerBase::SharedPtr timer_;
int32_t count_{0};
};
int main(int argc,char** argv){
rclcpp::init(argc,argv);
auto node=std::make_shared<LoanedMessagePublisher>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}

【额外配置】
shm.xml
<?xml version="1.0" encoding="UTF-8" ?>
<profiles xmlns="http:://www.eprosima.com/XMLSchemas/fastRTPS_Profiles">
<data_writer profile_name="default publisher profile" is_default_profile="true">
<qos>
<publishMode>
<kind>SYNCHRONOUS</kind>
</publishMode>
<data_sharing>
<kind>AUTOMATIC</kind>
</data_sharing>
->数据读取器的服务质量都设置为数据共享
</qos>
<historyMemoryPolicy>DYNAMIC</historyMemoryPolicy>
</data_writer>
<data_reader profile_name="default subscription profile" is_default_profile="true">
<qos>
<data_sharing>
<kind>AUTOMATIC</kind>
</data_sharing>
</qos>
<historyMemoryPolicy>DYNAMIC</historyMemoryPolicy>
</data_reader>
</profiles>
source install/setup.bash
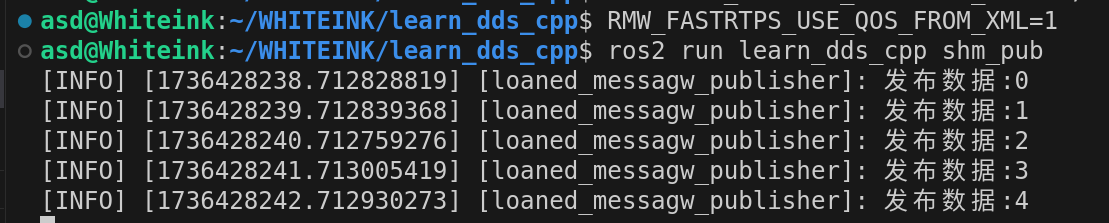
RMW_IMPLEMENTATION=rmw_fastrtps_cpp
FASTRTPS_DEFAULT_PROFILES_FILE=./shm.xml
RMW_FASTRTPS_USE_QOS_FROM_XML=1
ros2 run learn_dds_cpp shm_pub
//禁用借用消息
ROS_DISABLE_LOANED_MESSAGES=1

 浙公网安备 33010602011771号
浙公网安备 33010602011771号