ROS2【常用可视化工具】
ROS2【常用可视化工具】
rqt:查看节点关系、请求服务
//安装rqt所有相关组件
sudo apt install ros-$ROS_DISTRO-rqt-*
//运行rqt
rqt
常用插件 Plugins
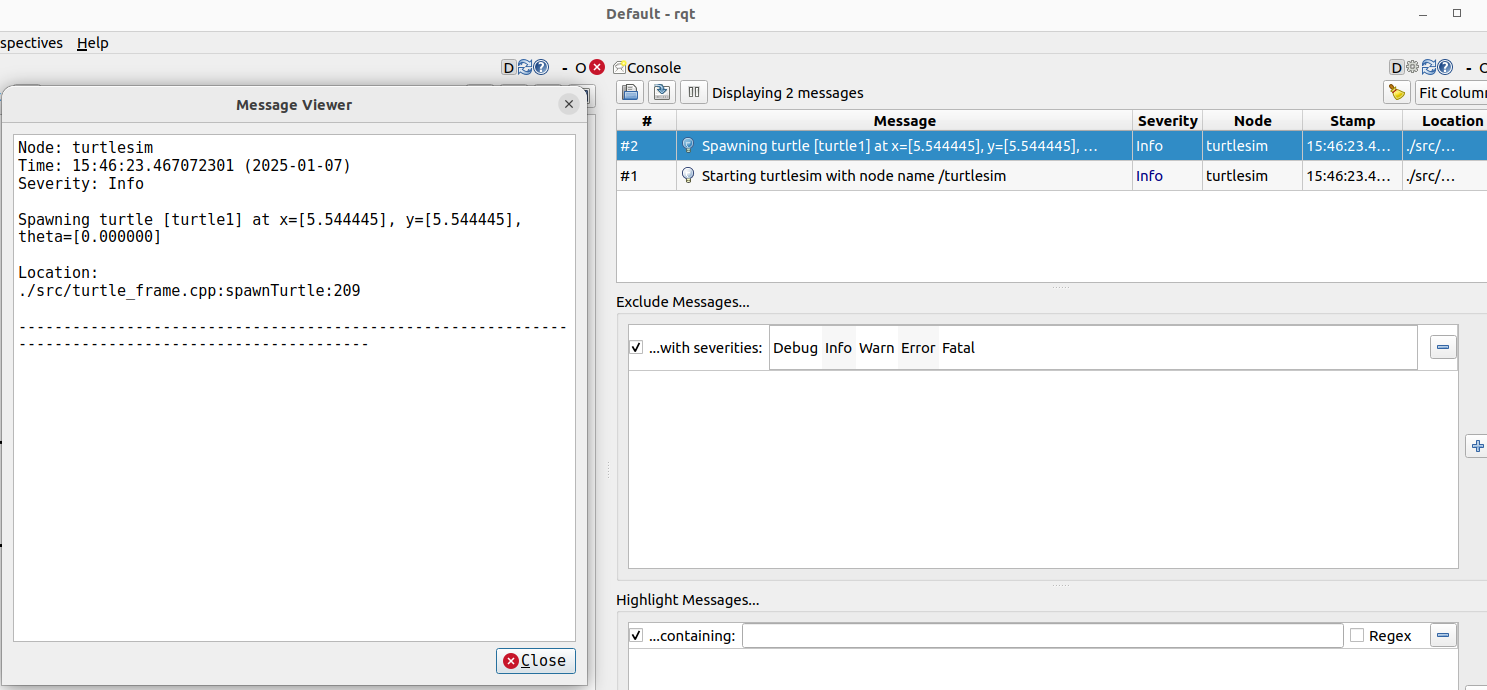
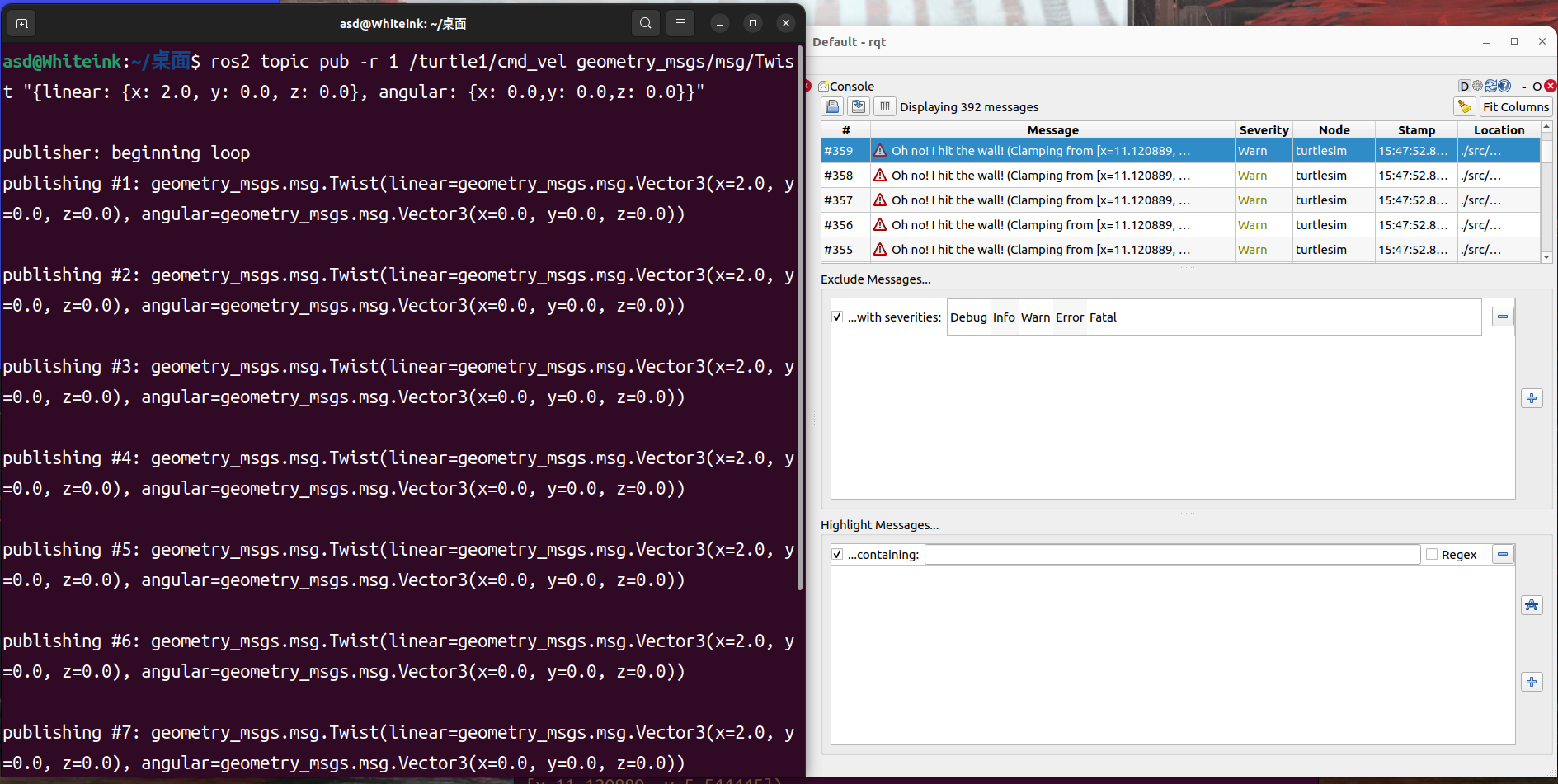
Logging - Console 日志显示
ros2 run rqt_console rqt_console
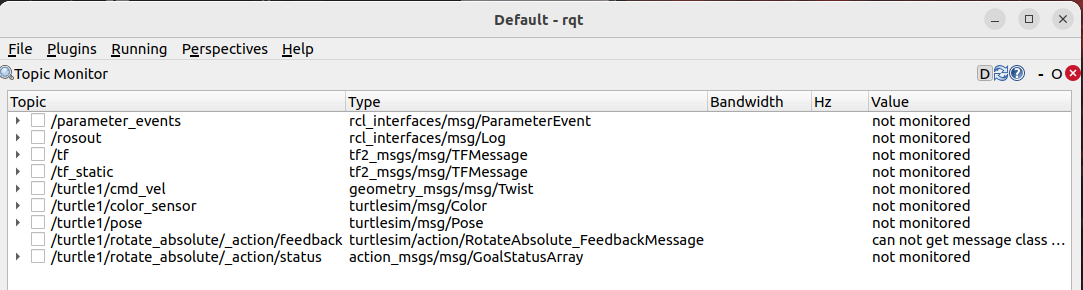
Topics - Topic Monitor 话题相关
查看列表
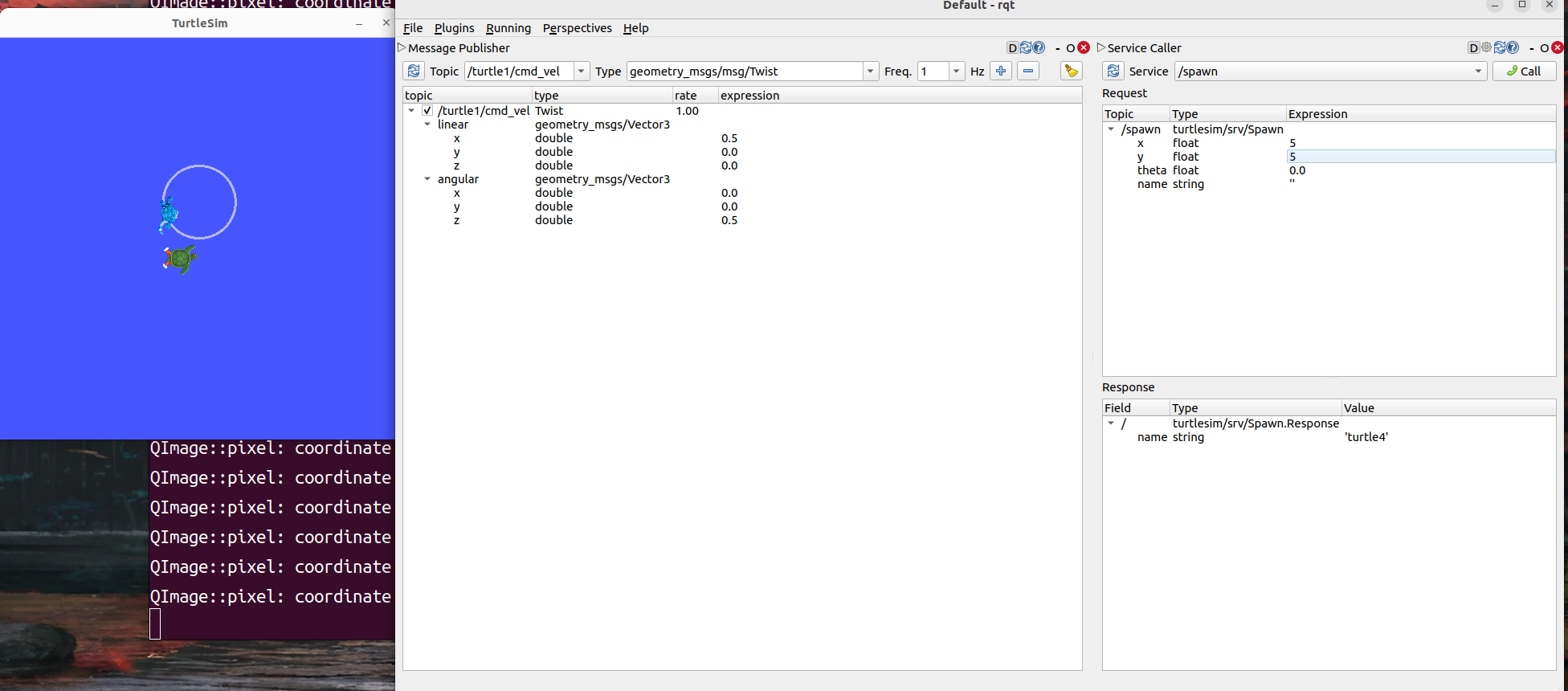
发布话题数据/调用服务请求
Introspection - Node Graph节点可视化
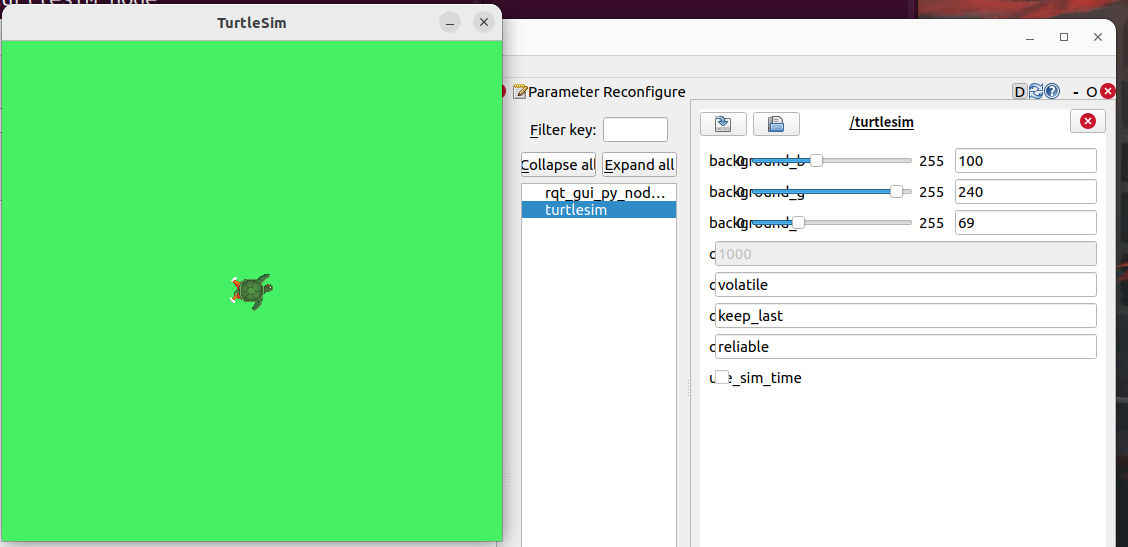
Configration 查看设置节点服务的参数
Rviz
//运行
rviz2
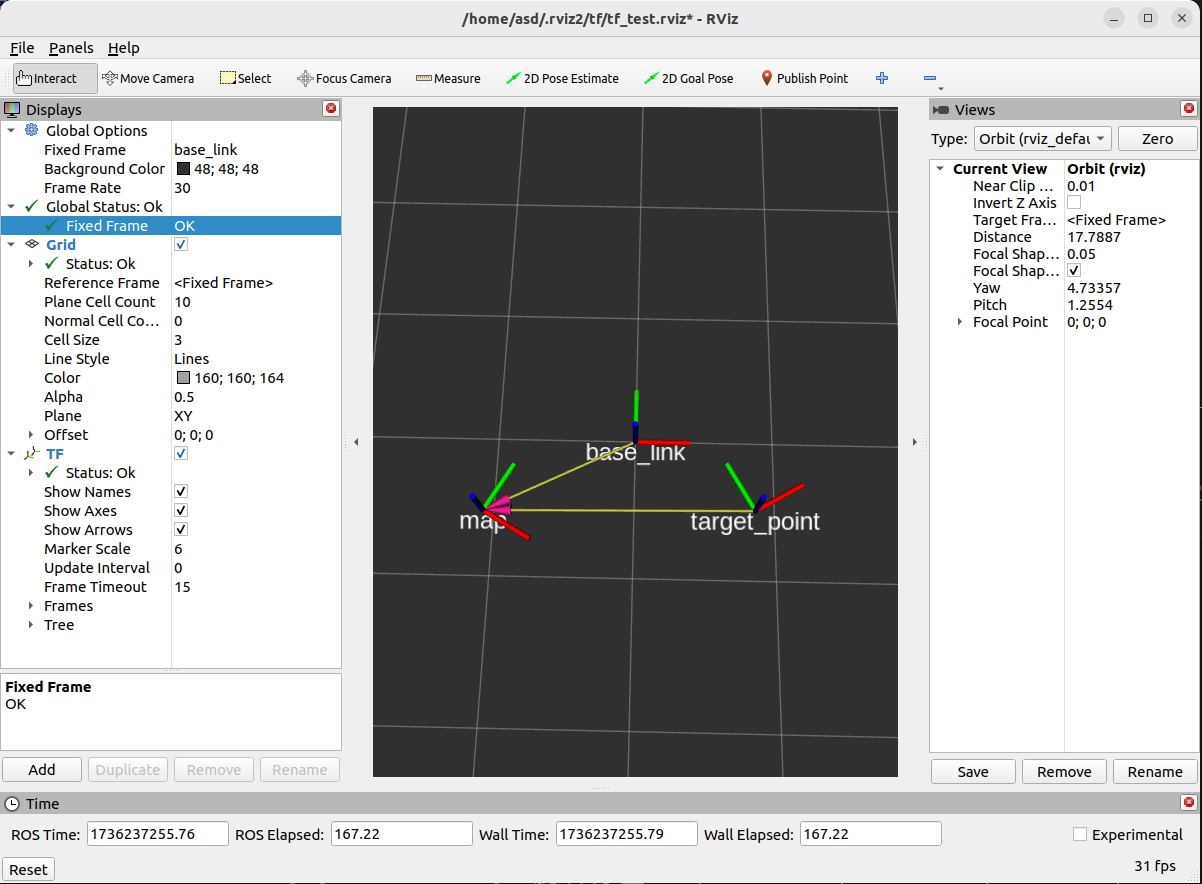
修改坐标系原点

保存 File - Save Config As
下次打开可直接打开地址:rviz2 -d <文件地址>
ros2 bag 数据记录工具
新建bags目录
录制record
///turtle1/cmd_vel话题上的数据
ros2 bag record /turtle1/cmd_vel
.db3 存储话题数据的数据库文件
metadata.yaml 记录描述文件
//查看
cat .../metadata.yaml
重放play
ros2 bag play <文件名>

 浙公网安备 33010602011771号
浙公网安备 33010602011771号