【陀螺仪】
【陀螺仪】
IMU
MPU6050
概述
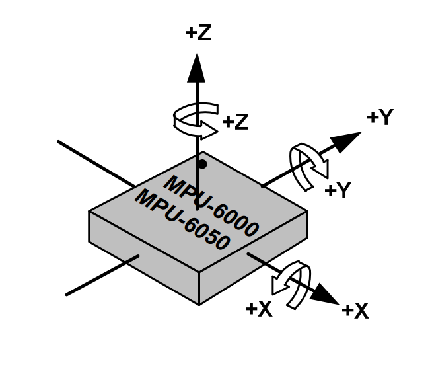
6轴姿态传感器
测量芯片自身X、Y、Z轴的加速度、角速度参数->数据融合(互补滤波、卡尔曼滤波)->姿态角
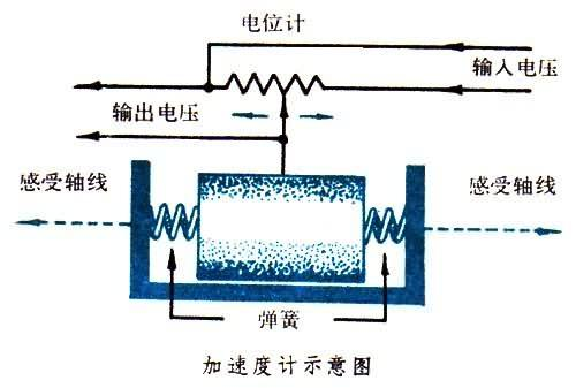
3轴加速度计ACC:测量X、Y、Z轴的加速度
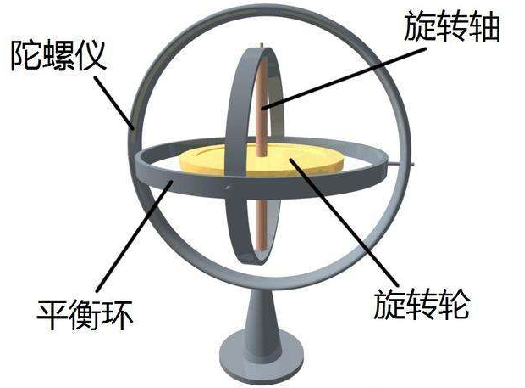
3轴陀螺仪传感器Gyro:测量X、Y、Z轴的角速度
三轴演示
加速度计模型 具有静态稳定性 不具有动态稳定性
陀螺仪 具有动态稳定性 不具有静态稳定性
关于轴数
6轴:3轴加速度+3轴角速度
9轴:3轴加速度+3轴角速度+3轴磁场强度
10轴:3轴加速度+3轴角速度+3轴磁场强度+气压强度(高度信息)
MPU6050参数
(1)16位ADC采集传感器的模拟信号 量化范围:-32768~32767
(2)加速度计满量程选择:±2、±4、±8、±16(单位 g 重力加速度)
(3)陀螺仪满量程选择: ±250、±500、±1000、±2000(单位 °/sec 每秒旋转多少度)
(4)可配置的数字低通滤波器
(5)可配置的时钟源
(6)可配置的采样分频
(7)从机地址 7位/16位
110 1000(AD0=0)
110 1001(AD0=1)
硬件电路

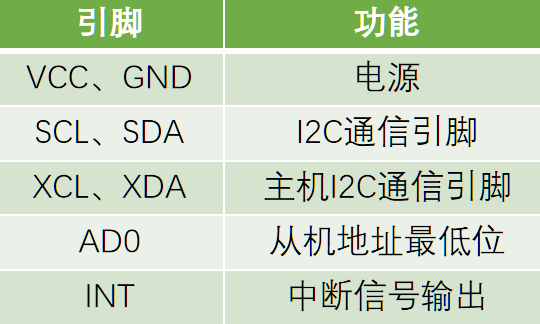
一般情况下:VCC,GND,SCL,SDA
XCL/XDA:外接磁力计或气压计
数字运动处理器DMP:姿态解算
关于寄存器
【配置寄存器】
采样频率分频器 SMPLRT_DIV
配置寄存器 CONFIG
陀螺仪配置寄存器 GYRO_CONFIG
加速度仪配置寄存器 ACCEL_CONFIG
【数据寄存器】

【电源寄存器】
PWR_MGMT_1
PWR_MGMT_2
器件ID号
WHO_AM_I


 浙公网安备 33010602011771号
浙公网安备 33010602011771号