【TF】
【TF】
坐标关系
ROS2可视化
基于话题通信
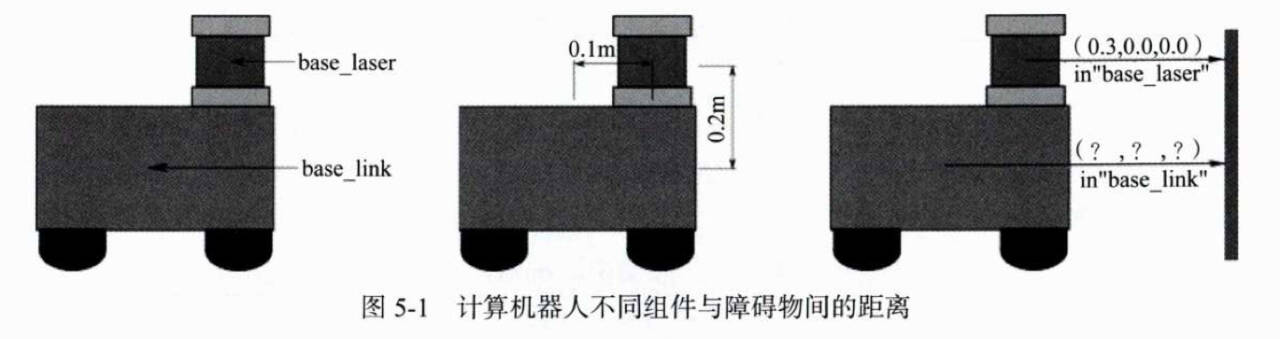
【例】 对于不同坐标系 某物有多远
base_link机器人基坐标
base_laser雷达坐标系
命令行使用TF
发布静态坐标 static_transform_publisher
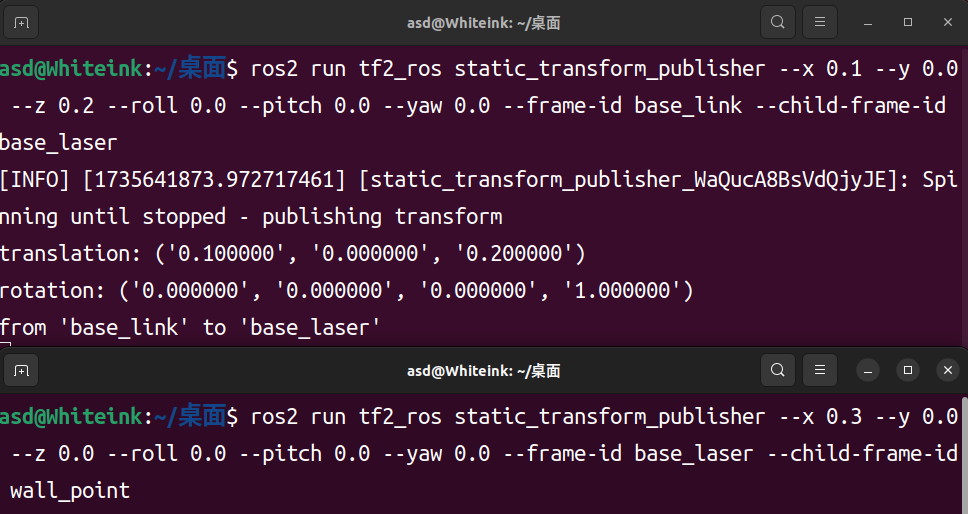
※rotation用四元数表示
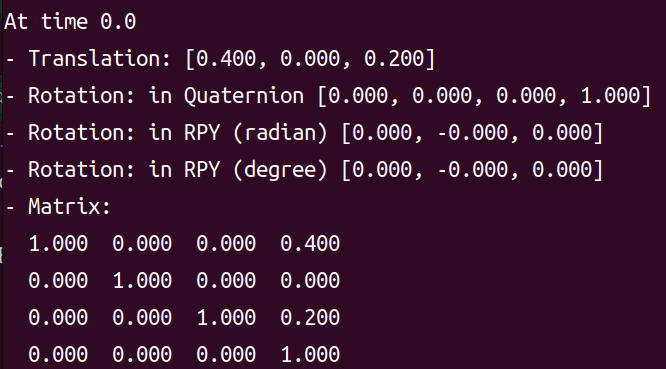
发布坐标变换 tf2_echo
ros2 run tf2_ros tf2_echo base_link wall_point
利用工具查看所有坐标系连接关系
ros2 run tf2_tools view_frames
TF原理
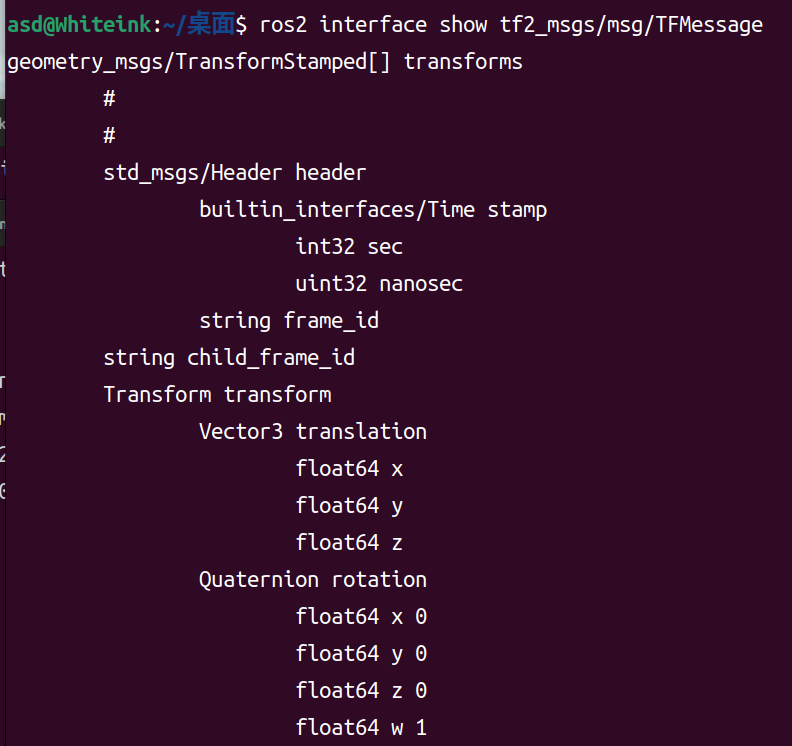
发布动态TF:数据被发布到/tf话题上
查询坐标关系变化:订阅/tf和/tf_static话题->查询数据



【例】地图坐标变换
发布静态TF
依赖
消息接口依赖 geometry_msgs
提供消息类型的转换函数 tf2_geometry_msgs
代码
#include<memory>
#include"geometry_msgs/msg/transform_stamped.hpp"
#include"rclcpp/rclcpp.hpp"
#include"tf2/LinearMath/Quaternion.h"
#include"tf2_geometry_msgs/tf2_geometry_msgs.hpp"
#include"tf2_ros/static_transform_broadcaster.h"
class StaticTFBroadcastrer : public rclcpp::Node{
public:
//在构造函数中进行
StaticTFBroadcastrer() : Node("tf_broadcaster_node"){
//创建静态广播发布器并发布
broadcaster_ = std::make_shared<tf2_ros::StaticTransformBroadcaster>(this);//初始化
this->publish_tf();//进行发布
}
void publish_tf(){
//构建消息接口对象
geometry_msgs::msg::TransformStamped transform;
transform.header.stamp=this->get_clock()->now();//时间戳赋值1
transform.header.frame_id = "map";//父节点
transform.child_frame_id = "target_point";//子结点
transform.transform.translation.x = 5.0;
transform.transform.translation.y = 3.0;
transform.transform.translation.z = 0.0;
tf2::Quaternion quat;
quat.setRPY(0,0,60*M_PI/180);//弧度值欧拉角转四元数
transform.transform.rotation = tf2::toMsg(quat);//转成消息接口类型
broadcaster_->sendTransform(transform);//将坐标变换发布出去(静态变换只需要发布一次)
}
private:
std::shared_ptr<tf2_ros::StaticTransformBroadcaster> broadcaster_;
};
int main(int argc,char** argv){
rclcpp::init(argc,argv);
auto node=std::make_shared<StaticTFBroadcastrer>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
CMakeLists.txt添加依赖
ament_target_dependencies(static_tf_broadcaster rclcpp tf2 tf2_ros geometry_msgs tf2_geometry_msgs)
发布动态TF
不断向外发布->timer定时器包装定时发布
代码
#include<memory>
#include"geometry_msgs/msg/transform_stamped.hpp" //提供消息接口
#include"rclcpp/rclcpp.hpp"
#include"tf2/LinearMath/Quaternion.h" //提供tf2::Quaternion类
#include"tf2_geometry_msgs/tf2_geometry_msgs.hpp" //提供消息类型转换函数
#include"tf2_ros/transform_broadcaster.h" //提供坐标广播器类:动态广播
#include<chrono>
using namespace std::chrono_literals;
class DynamicTFBroadcaster : public rclcpp::Node{
public:
DynamicTFBroadcaster() : Node("dynamic_tf_broadcaster"){
tf_broadcaster_=std::make_shared<tf2_ros::TransformBroadcaster>(this);
//定时器
timer_=create_wall_timer(10ms,std::bind(&DynamicTFBroadcaster::publishTransform,this));
}
void publishTransform(){
geometry_msgs::msg::TransformStamped transform;
transform.header.stamp=this->get_clock()->now();
transform.header.frame_id = "map";
transform.child_frame_id = "base_link";
transform.transform.translation.x=2.0;
transform.transform.translation.y=3.0;
transform.transform.translation.z=0.0;
tf2::Quaternion quat;
quat.setRPY(0,0,30*M_PI/180);
transform.transform.rotation = tf2::toMsg(quat);
tf_broadcaster_->sendTransform(transform);
}
private:
std::shared_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster_;
rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc,char** argv){
rclcpp::init(argc,argv);
auto node=std::make_shared<DynamicTFBroadcaster>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
查询TF关系
#include<memory>//智能指针相关
#include"geometry_msgs/msg/transform_stamped.hpp"//提供消息接口
#include"rclcpp/rclcpp.hpp"
#include"tf2/LinearMath/Quaternion.h"
#include"tf2/utils.h"//提供tf2:getEulerYPR函数->将四元数转换为欧拉角
#include"tf2_geometry_msgs/tf2_geometry_msgs.hpp"
#include"tf2_ros/buffer.h"//提供TF缓冲类Buffer->存储订阅到的TF数据
#include"tf2_ros/transform_listener.h"//提供坐标监听器类->订阅TF变换
#include<chrono>
using namespace std::chrono_literals;
class TFListener : public rclcpp::Node{
public:
TFListener() : Node("tf_listener"){
buffer_=std::make_shared<tf2_ros::Buffer>(this->get_clock());
listener_=std::make_shared<tf2_ros::TransformListener>(*buffer_,this);
//*buffer_:获取指针指向的原始对象再传入
timer_=this->create_wall_timer(5s,std::bind(&TFListener::getTransform,this));
}
void getTransform(){
//使用try-catch对异常进行捕获
try{
//查询坐标变换
const auto transform = buffer_->lookupTransform(
"base_link","target_point",this->get_clock()->now(),//数据开始时间
rclcpp::Duration::from_seconds(1.0f));//超时时间
//转换结果并输出
const auto &translation = transform.transform.translation;
const auto &rotation = transform.transform.rotation;
double yaw,pitch,roll;
tf2::getEulerYPR(rotation,yaw,pitch,roll);//四元数转欧拉角
RCLCPP_INFO(get_logger(),"平移分量:(%f,%f,%f)",translation.x,translation.y,translation.z);
RCLCPP_INFO(get_logger(),"旋转分量:(%f,%f,%f)",roll,pitch,yaw);
}
catch(tf2::TransformException &ex){//处理异常
RCLCPP_WARN(get_logger(),"异常:%s",ex.what());
}
}
private:
std::shared_ptr<tf2_ros::Buffer> buffer_;
std::shared_ptr<tf2_ros::TransformListener> listener_;
rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc,char** argv){
rclcpp::init(argc,argv);
auto node=std::make_shared<TFListener>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号