
Deep Learning Optimizer | Adam、AdamW - 实践
一、 指数加权平均 EWA|EMA
指数加权平均是一种对时间序列数据进行平滑处理的一种方法,思想主要是:
越近的信息权重越大,越远的内容权重越小,且权重呈指数衰减
definite:给定一个时间序列x 1 , x 2 , x 3 , . . . , x t x_1, x_2, x_3, ...,x_tx1,x2,x3,...,xt,其指数加权v t v_tvt定义为
v 0 = 0 v t = β v t − 1 + ( 1 − β ) x t v t = ( 1 − β ) ( x t + β x t − 1 + β 2 x t − 2 + β 3 x t − 3 + . . . ) v_0=0\\v_t=\beta v_{t-1}+(1 - \beta)x_t \\v_t=(1-\beta)(x_t+\beta x_{t-1}+\beta^2 x_{t-2} + \beta^3 x_{t-3} + ...)v0=0vt=βvt−1+(1−β)xtvt=(1−β)(xt+βxt−1+β2xt−2+β3xt−3+...)
可以看到当v 0 = 0 , β = 0.7 v_0=0, \beta=0.7v0=0,β=0.7时计算的结果偏小,这是由于v 0 v_0v0通过初始化为0的缘故,这里能够对V进行修正V t c o r r e c t = V t 1 − β t V_t^{correct}=\frac{V_t}{1-\beta^t}Vtcorrect=1−βtVt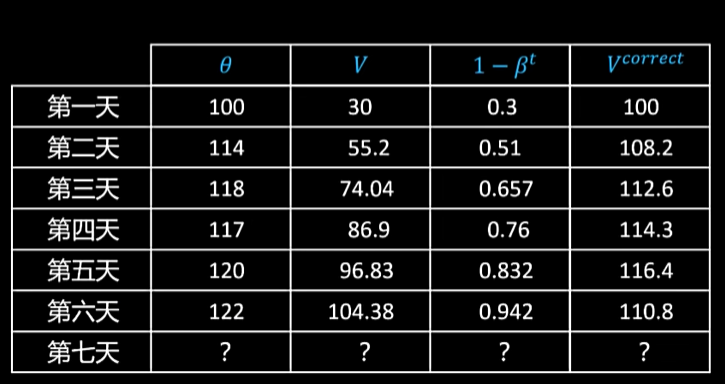
二、 SGD
如图是损失函数g的等高线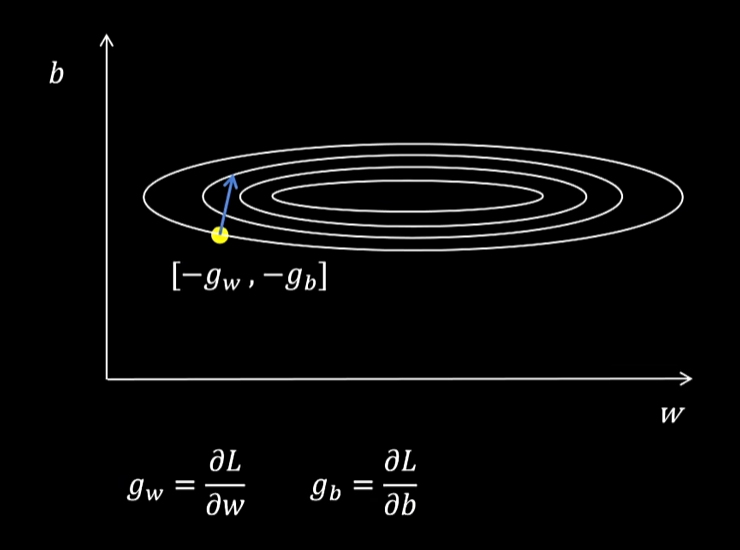
sgd更新啊权重仅仅取决于当前梯度,这样可能会导致训练震荡不稳定。
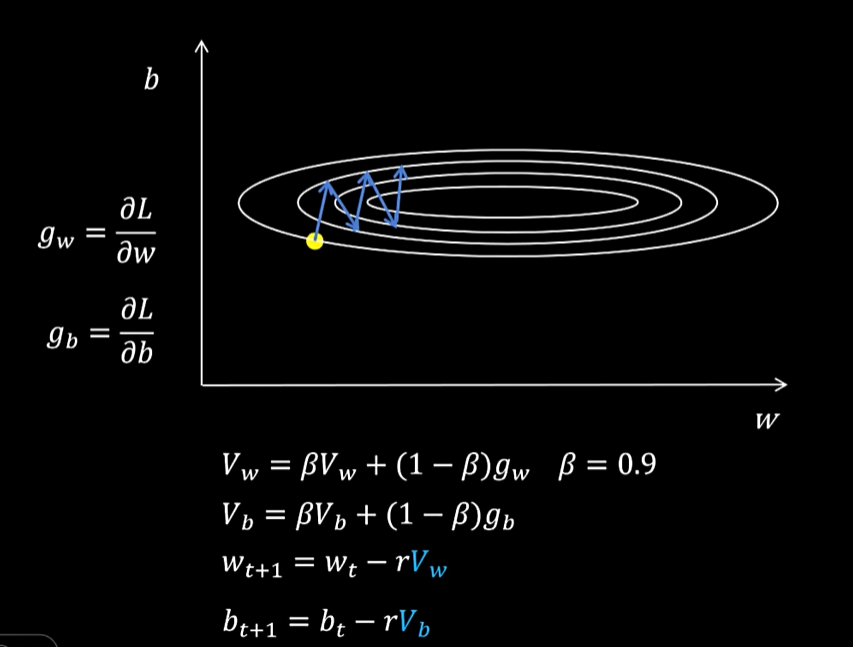
三、 Momentum
用梯度的指数加权平均去更新,这样加入指数平均许可减少异常数据的影响。就是如果不是用当前梯度去更新参数,而
四、 RMSProp
在不同方向上梯度不同的问题导致的震荡,因为所有方向共享一个学习率,这就导致在平稳方向参数更新缓慢,而在陡峭方向上,参数更新又会比较剧烈从而发生震荡。就是RMSProp解除的问题
RMSProp是对AdaGrad的基础上改进的,AdaGrad为每个参数维护了一个历史梯度平方和G t = ∑ i = 1 t g i 2 G_t=\sum_{i=1}^{t}g_i^2Gt=∑i=1tgi2,用历史梯度平方和来自适应调整学习率
θ t + 1 = θ t − α G t + ϵ ⊙ g t \theta_{t+1}=\theta_{t}-\frac{\alpha}{\sqrt{G_t+\epsilon}}\odot g_tθt+1=θt−Gt+ϵα⊙gt
而RMSProp对AdaGrad的改进体现在位于梯度平方的维护上使用指数加权平均,仅让最近的梯度平方参与学习率的修正。
v t = β v t − 1 + ( 1 − β ) g t 2 θ t + 1 = θ t − α v t + ϵ g t v_t=\beta v_{t-1} + (1-\beta)g_t^2\\\theta_{t+1} = \theta_t - \frac{\alpha}{\sqrt{v_t+\epsilon}}g_tvt=βvt−1+(1−β)gt2θt+1=θt−vt+ϵαgt
五、 Adam
Adam算法就是将Mountum算法和RMSProp算法结合起来,并对指数加权平均值进行修正。
g w = ∂ L ∂ w V w = β 1 V w + ( 1 − β 1 ) g w , β 1 = 0.9 S w = β 2 S w + ( 1 − β 2 ) g w 2 , β 2 = 0.999 V w c o r r e c t = V w 1 − β 1 t S w c o r r e c t = S w 1 − β 2 t w t + 1 = w t − α S w c o r r e c t + ϵ V w c o r r e c t g_w=\frac{\partial L}{\partial w} \\V_w=\beta_1V_w+(1-\beta_1)g_w,\beta_1=0.9\\ S_w=\beta_2 S_w + (1-\beta_2)g_w^2,\beta_2=0.999\\ V_w^{correct}=\frac{V_w}{1-\beta_1^t}\\ S_w^{correct}=\frac{S_w}{1-\beta^t_2}\\ w_{t+1} = w_t - \frac{\alpha}{\sqrt{S_w^{correct}}+\epsilon}V_w^{correct}gw=∂w∂LVw=β1Vw+(1−β1)gw,β1=0.9Sw=β2Sw+(1−β2)gw2,β2=0.999Vwcorrect=1−β1tVwSwcorrect=1−β2tSwwt+1=wt−Swcorrect+ϵαVwcorrect
六、 AdamW
在更新参数时进行了weight decay,具体weight decay 参考链接就是AdamW是在AdamW上做了一点改动就Weight decay 和 L2 Regularization,用一句话就是在更新参数是减去一个值,防止参数过大,提高模型的泛化性。
g w = ∂ L ∂ w V w = β 1 V w + ( 1 − β 1 ) g w , β 1 = 0.9 S w = β 2 S w + ( 1 − β 2 ) g w 2 , β 2 = 0.999 V w c o r r e c t = V w 1 − β 1 t S w c o r r e c t = S w 1 − β 2 t w t + 1 = w t − α S w c o r r e c t + ϵ V w c o r r e c t − r λ w t g_w=\frac{\partial L}{\partial w} \\V_w=\beta_1V_w+(1-\beta_1)g_w,\beta_1=0.9\\ S_w=\beta_2 S_w + (1-\beta_2)g_w^2,\beta_2=0.999\\ V_w^{correct}=\frac{V_w}{1-\beta_1^t}\\ S_w^{correct}=\frac{S_w}{1-\beta^t_2}\\ w_{t+1} = w_t - \frac{\alpha}{\sqrt{S_w^{correct}}+\epsilon}V_w^{correct}-r \lambda w_tgw=∂w∂LVw=β1Vw+(1−β1)gw,β1=0.9Sw=β2Sw+(1−β2)gw2,β2=0.999Vwcorrect=1−β1tVwSwcorrect=1−β2tSwwt+1=wt−Swcorrect+ϵαVwcorrect−rλwt
七、 总结
参数大小的4倍。就是Adam、和AdamW都是得对每个参数维护两个相关的量一个保存梯度的指数平均,一个保存指数平方的指数平均,倘若参数是用float16进行存储,由于一般梯度的数值都比较小,应该使用float32来存储,那么这两个值占用的大小
本文参考视频十分钟搞明白Adam和AdamW,SGD,Momentum,RMSProp,Adam


 浙公网安备 33010602011771号
浙公网安备 33010602011771号